K I M
Körperimpedanzmessung
Projektbeschreibung
 |
 |
|
Die Körperimpedanzmessung ist ein einfach zu bedienendes System um den Körperleitwert präzise zu messen. Dieser ändert sich je nach Befinden bzw. Zustand des jeweiligen Probanden. Das System sollte die zur Messung benötigten Signale mit Hilfe eines Signalgenerators selbst erzeugen und zur Verfügung stellen. Um eine möglichst genaue Messung zu gewährleisten, werden zwei Signale mit 1kHz bzw. 20kHz in den Körper geleitet. Dies wird mit zwei Klemmelektroden realisiert. Da die Ausgangssignale viele Artefakte aufweisen werden, muss das Signal mit speziellen Filtern und einer Auswerteelektronik aufbereitet werden. Danach wird das Signal digitalisiert, grafisch aufbereitet und ausgewertet.
|
 |
 |
1. Signalgenerierung
 |
 |
|
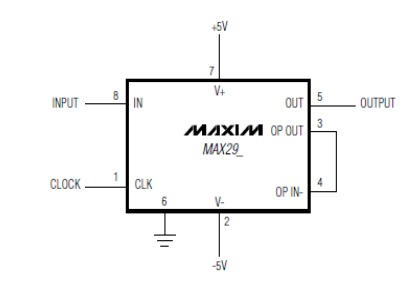
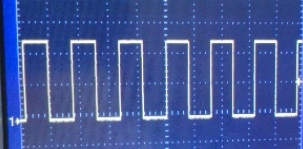
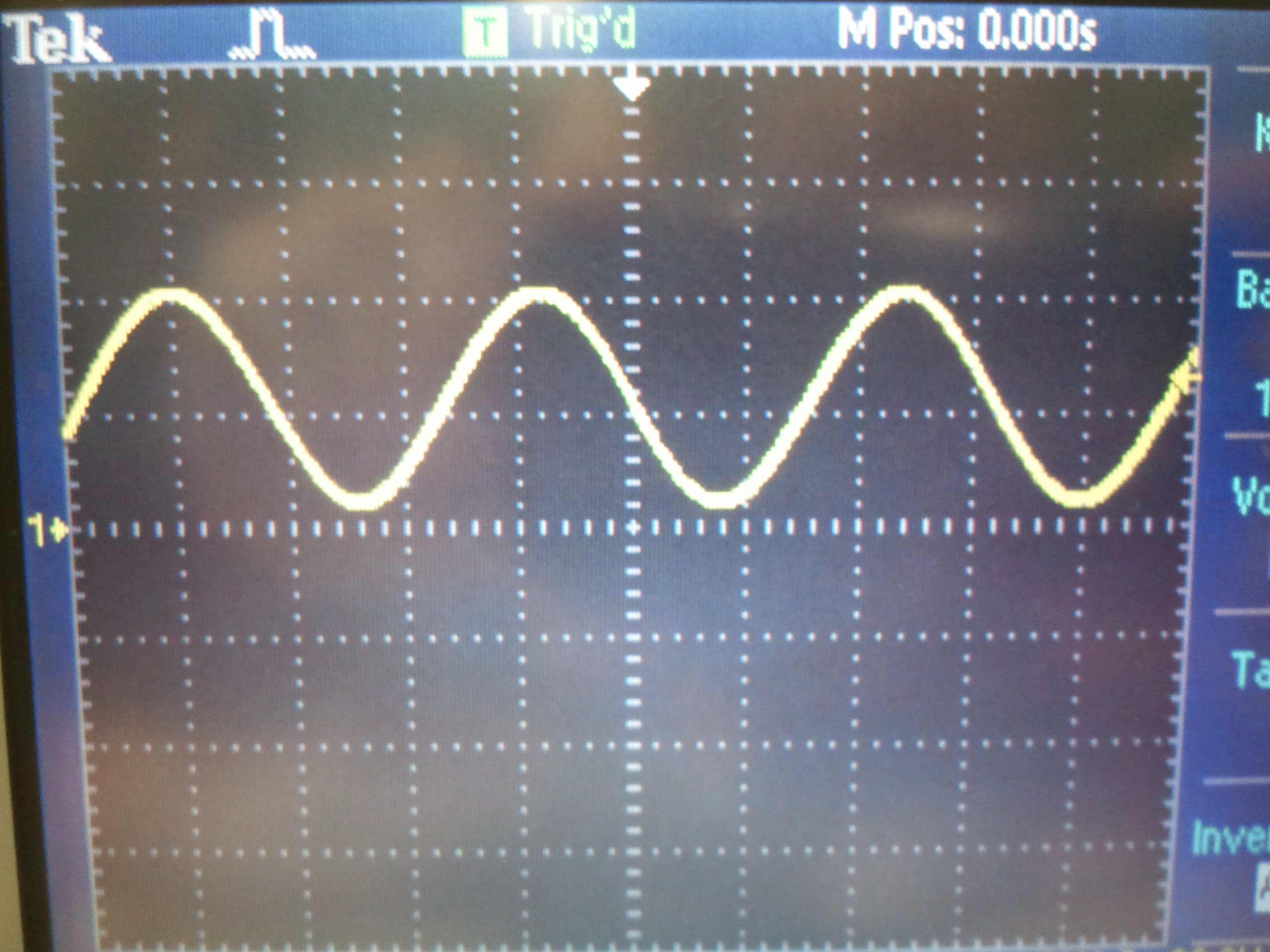
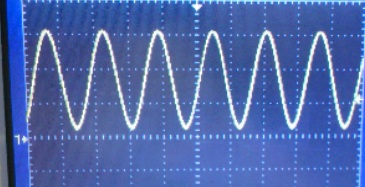
Das Signal mit 1kHz bzw. 20kHz wird von einem Mikrocontroller erzeugt. Hierfür wird die integrierte Pulsweitenmodulation (PWM) des PICs verwendet. Wie man gut erkennen kann, hat das Signal knapp 4,8 V und eine Frequenz von 1.245kHz. Da das Erzeugen mittels der PWM ein Signal von 1kHz nicht genau zulässt, akzeptieren wir die kleine Abweichung. Dieses Rechtecksignal wird nun mittels eines Switched-Capacitor Filter (SC-Filter) weiter aufbereitet um einen Sinus daraus zu erhalten. Hierfür wird der MAX292 verwendet, da er eine gute Rauschunterdrückung aufweist und nur eine Versorgungsspannung von +/- 5V bzw. 5V DC benötigt.
|
 |
 |
2. Verstärkung
 |
 |
|
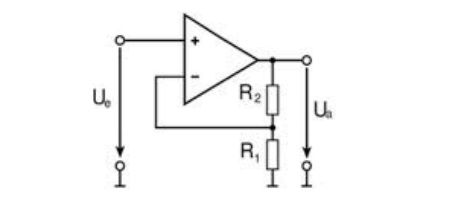
Da das Sinussignal nur eine Spannung von knapp 4V aufweist, muss das Signal auf 5V verstärkt werden, um weiter damit arbeiten zu können. Hierfür wird ein nichtinvertierender Verstärker verwendet.So wird das Signal um V = 1,5 verstärkt. Das Signal weist nun eine Spannung von 5V auf. (R2 = 5kOhm; R1 = 10kOhm).Das Signal mit 5V wird benötigt, um die weiteren Schritte zu realisieren.
|
3. Prinzip der Messung
 |
|
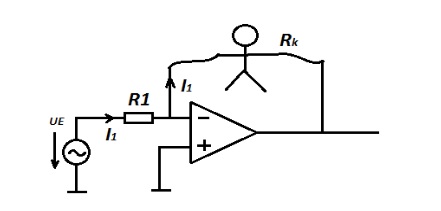
Ue stellt das erzeugte und verstärkte Sinussignal dar. Das Signal mit 5V wird nun benötigt, um über den Widerstand R1 den Strom einzustellen. Dieser wird dann in den Körper geleitet.
Dieser Wert ergibt sich aus der Formel: I= Ue / R1
|
4. Schmitt-Trigger
 |
 |
|
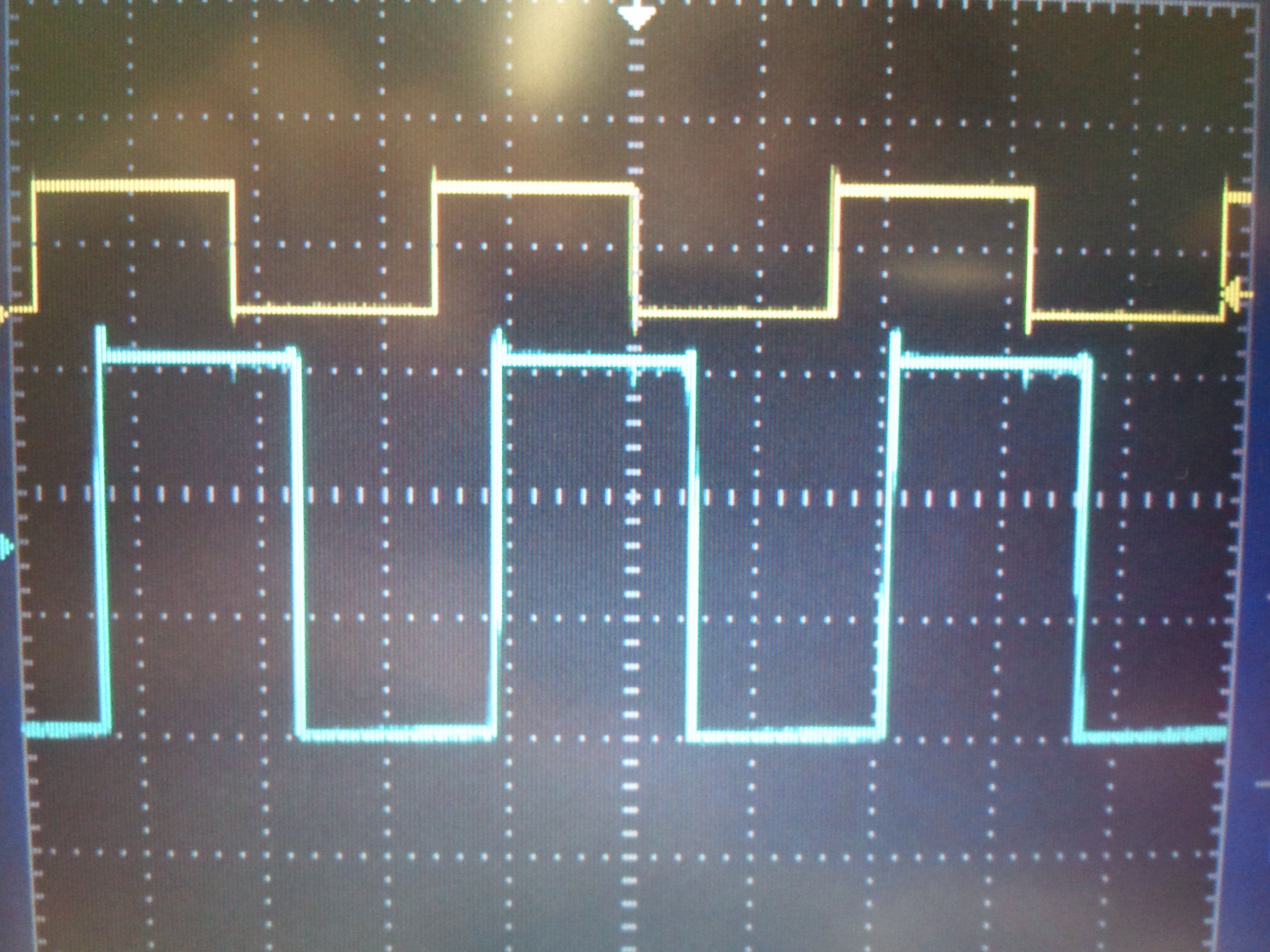
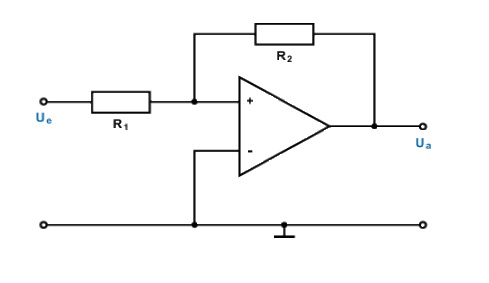
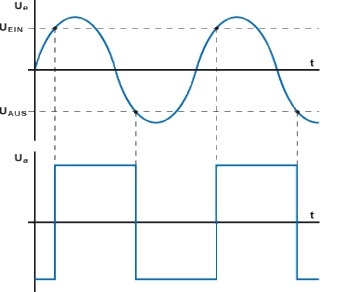
Das phasenverschobene Signal muss nun wieder zu einem Rechteck gewandelt werden, um die zwei Rechteck-Signale mittels XOR-Gatter zu vergleichen.Durch die beiden Widerstände R1 und R2 lässt sich die Schalthysterese für den Schmitt-Trigger einstellen.Da das Signal stark variiert war es hier schwer eine Einstellung des Schmitt-Triggers zu finden. Deswegen wurde das Signal mittels Tiefpasses gemittelt und als Referenz auf den negativen Eingang des OPVs gelegt. Das folgende Bild zeigt das Sinussignal, welches mittels Schmitt-Trigger zu einem Rechteck aufbereitet wird.
|
 |
5. Betragsmessung
 |
|
Neben dem Winkel des verschobenen Signals, ist auch noch der Betrag von Interesse. Um diesen korrekt messen zu können, wird ein Spitzenwertgleichrichter und ein anschließender Differenzverstärker verwendet.Um den Betrag des Signals zu erhalten, wird das Sinussignal verwendet, welches nach dem Körper gemessen wird. Dieses variable Signal wird zuerst von einem Impedanzwandler entkoppelt und danach aufgespalten. Der erste Teil wird von einem Spitzenwertgleichrichter aufbereitet und der zweite Teil von einem RC-Tiefpass gemittelt. Nun wird das Signal von einem Differenzverstärker weiter verarbeitet. Auf den + Eingang des OPVs wird das Signal des Spitzenwertgleichrichters angelegt, auf den – Eingang das gemittelte Signal. Um den korrekten Betrag des Signals zu erhalten werden diese nun von einander subtrahiert. Dieses Signal wird nun mit dem ADC des PICs weiter aufbereitet und softwaretechnisch ausgewertet.
|
 |