With the Smart Timelapse Slider it should be possible to record moveable timelapse recordings
on two motorized moveable axes. Camera guids in this sector are often equipped with too much additional functions.
That makes the practice often unnecessarily complicated and so you lose often the look at the essential, the photograph.
Smart Timelapse Slider should be simple and uncomplicated to use. The system can be controlled with an android mobile phone.
Settings can be edited simple and saved before the recording starts.
Kurzfassung
Mit Hilfe des Smart Timelapse Sliders sollten bewegte Zeitrafferaufnahmen auf zwei motorisiert bewegbare Achsen möglich sein.
Kameraführungen sind in diesem Bereich oft mit zuviel Zusatzfunktionen ausgestattet.
Das macht die Anwendung oft unnötig kompliziert und damit verliert man oft schnell den Blick auf das Wesentliche, nämlich auf die Fotografie.
Smart Timelapse Slider sollte einfach und unkompliziert bedienbar sein und auch schnell die Aufnahme starten können.
Deswegen wird das System mit Hilfe einer Android Applikation gesteuert werden, somit können Einstellungen schon im
Voraus bearbeitet und gespeichert werden.
Bedienung
Gesteuert wird der Smart Timelapse Slider durch eine benutzerfreundlichen Android Applikation.
Dort können, für die Aufnahme wichtig, Einstellungen vorgenommen werden. Oder man benutzt Voreinstellungen
und legt gleich mit der Aufnahme los.
Kommunikation
Um drahtlos mit den Smart Timelapse Slider zu kommunizieren wird nur ein Android Gerät mit
integrierten Bluetooth Modul benötigt. Im Freien kann man damit über 50 Meter vom Smart TImelapse Slider entfernt sein.
Versorgung
Um die Versorgung so problemlos und simpel wie möglich zu gestalten braucht der Smart Timelapse Slider
nur eine Versorgung über USB. Dadurch können man das Gerät mit einer kleinen handlichen Powerbank betreiben.
Details
Android Applikation
Steuerungselektronik
Bluetooth Kommunikation
Ein- und Ausgänge
Schrittmotoren
Mechanischer Aufbau
Updates
Juni 2015
Die Idee
Nach einigen verworfenen Ideen und gescheiterten Brainstorming Versuchen
entschieden wir uns einen Slider für Zeitrafferaufnahmen zu bauen.
September 2015
Großbestellung
Die ersten Komponenten wurden ausgewählt, der Slider inklusive Schlitten,
der Arduino Uno und das Bluetooth Modul wurden bestellt.
Oktober 2015
Bluetooth Blinkie
Um die Bluetooth Verbindung mit den Modul zu testen
und Probleme bei der Android Programmierung festzustellen, wurde die erste Applikation programmiert
welche eine LED am Arduino Port ein- und ausschaltet.
November 2015
Die ersten Schritte
Der nächste Schritt war die Ansteuerung der Schrittmotoren. Bei der Programmierung wurde
nicht die fertige Arduino Library verwendet, um später eine annähernde parallel Ansteuerung
der zwei Schrittmotoren zu erreichen.
Dezember 2015
Motorisierte Kamerafahrt
Versuche mit Getriebemotoren, Servomotoren und auch mit Schrittmotoren wurden durchgeführt.
Nach langer Recherche wurde ein bipolar Schrittmotor mit 100:1 Planetengetriebe bestellt. Danach wurde dieser auf den
Slider der Firma Igus adaptiert.
Januar 2016
Linear- und Drehbewegung
Durch die tatkräftige Ünterstützung des Fachlehrers Ing. Helmut Cohrs konnte der mechanische
Teil des Projektes fertiggstellt werden.
Februar 2016
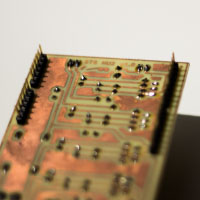
Platinenfertigung
Nachdem alle fertigen Motorboards für Arduino mit Motorspannungen über 7 Volt arbeiten können wurde ein
eigenes Motorboard gefertigt, welches den Motortreiber TLE4202B verwendet.
März 2016
Bluetooth Gespräche
Die erste Version des Kommunikationsprotokolls wurde erstellt. Dieses wurde in der Arduino-Firmware und auch
in der Android-Applikation implementiert.
April 2016
Diplomarbeit
Zum Schluss wurde die Diplomarbeit fertig geschrieben, verbessert und zuletzt gedruckt.
Juni 2016
Diplomarbeit Präsentation
Beendet wurde das Projekt wie es begann, mit einer Präsentation.
Team
Tobias Bürger
Teamleader & Software
Fabian Kneß
Elektronik & Mechanik
Credits
Der größte Dank geht an Ing. Helmut Cohrs, welcher nicht nur die gesamte Planung und auch den Zusammenbau der mechanischen Komponenten übernahm,
sondern auch einen großen Teil der elektrischen Steuerung übernahm. Ohne seine tatkräftige Unterstützung würden elementare Teile in diesem Projekt fehlen.
Ein weiterer Dank gilt der HTL Mössingerstraße, welche mit Hilfe der Diplomarbeit Schülerinnen wie auch Schülern die Möglichkeit bietet ihr Wissen im Diplomarbeitsprojekt zu testen.
Nicht nur die Schule sondern auch die Institution Jugend Innovativ unterstützte finanziell dieses Projekt.
DANKE!
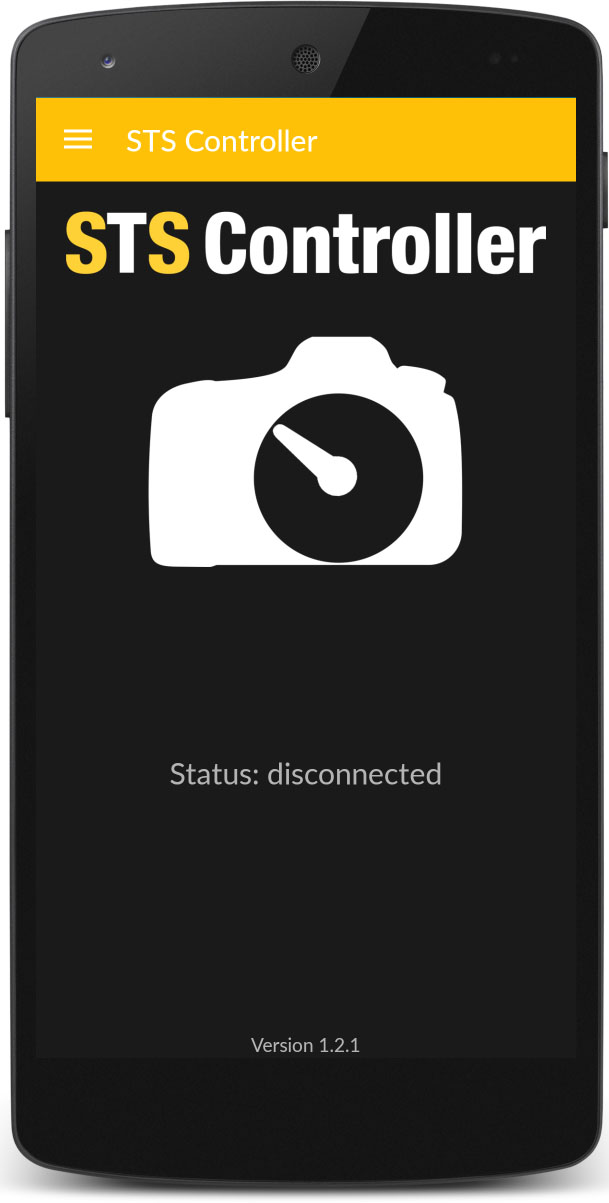
Android Applikation
Für die Benutzerfreundlichkeit und auch wegen der Einfachheit der Bedienung wurde für die Steuerung eine Android App programmiert.
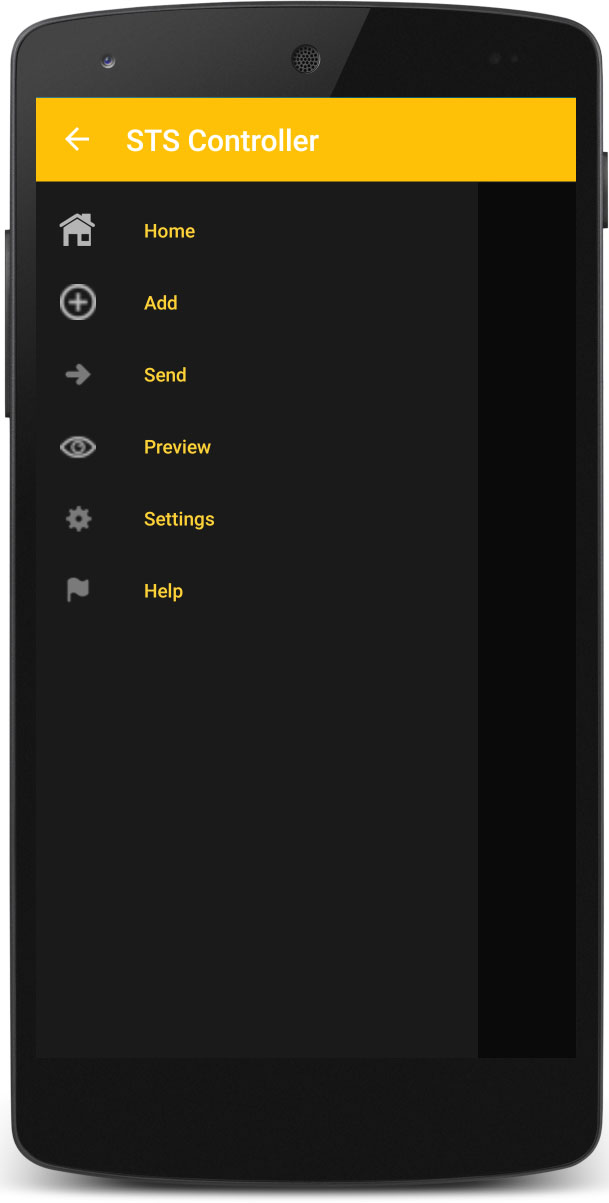
Wird die Applikation das erste Mal geöffnet befindet man sich am Home Bildschirm, in diesen sind Information zur Version der App und auch zur Konnektivität zum
Bluetooth-Modul ersichtlich. Durch einen Wischen nach rechts oder auch ein Klick auf das Menü-Symbol, öffnet sich der NavigationDrawer. Mit diesem kann zwischen
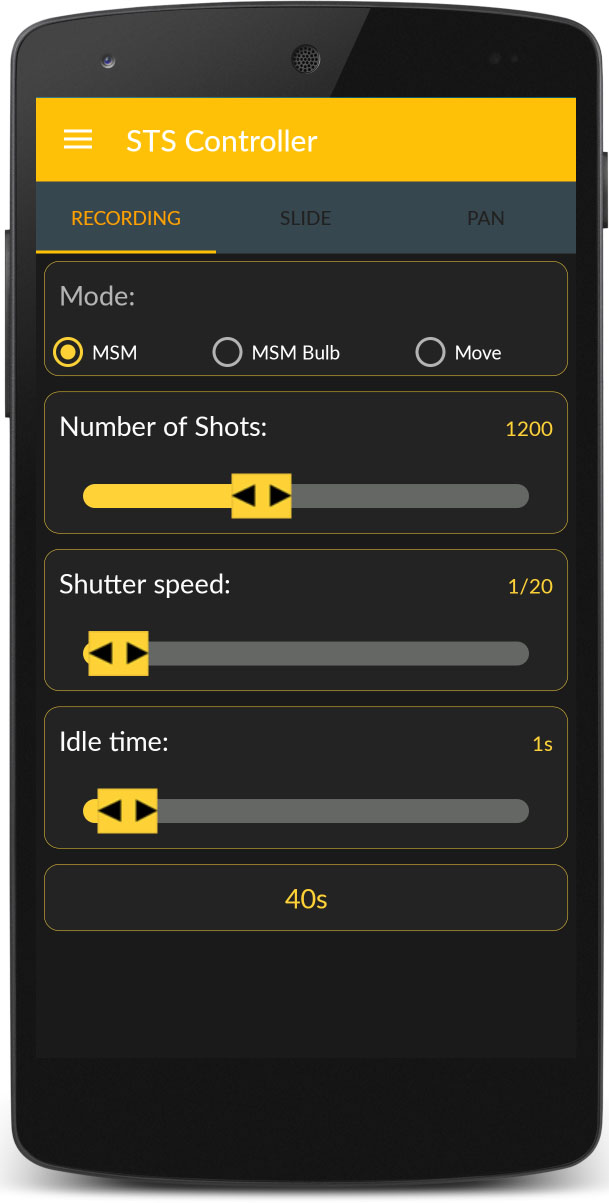
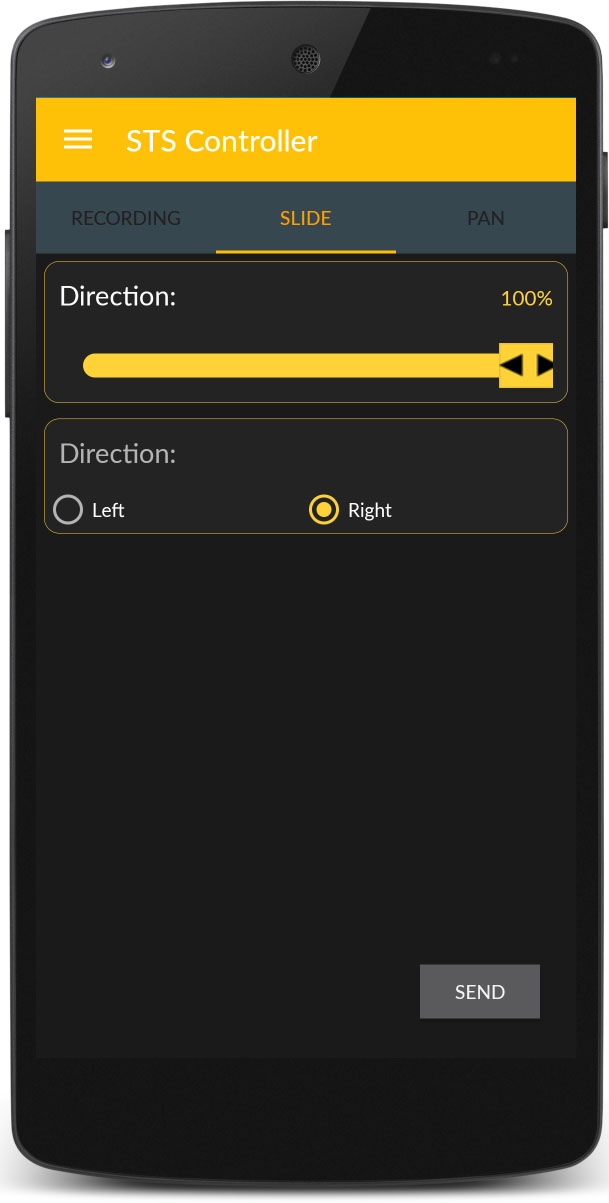
verschiedenen Fragmenten gewechselt werden. Wird Send angeklickt, öffnet sich eines der wichtigsten Fragmente. Mit Hilfe dieses Fragmentes können Parameter, welche für den
Bewegungsablauf der Kameraschiene notwendig sind, justiert werden und danach direkt an den Mikrocontroller weitergeleitet werden oder in der App abgespeichert werden.
Software: Android Studio v2.1.0
Target SDK: Android v6.0.1
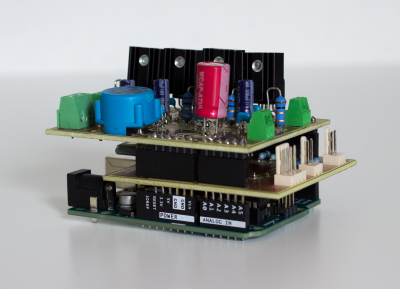
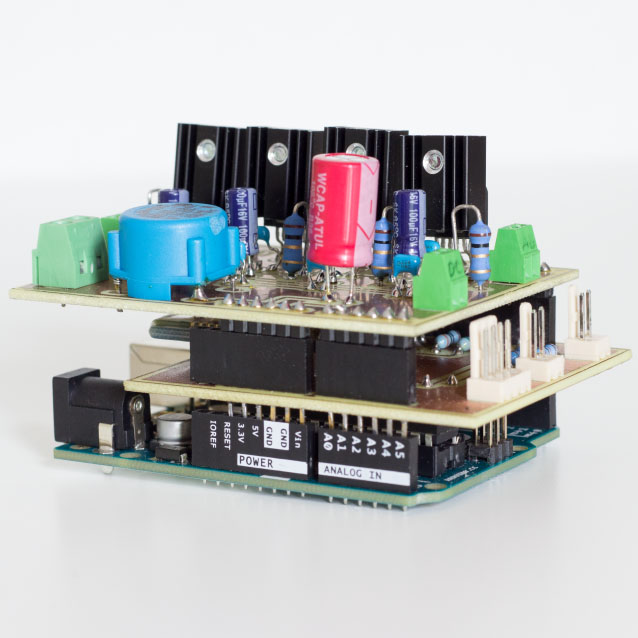
Steuerungselektronik
Um die Motoren anzusteuern wie auch die Daten der Android-App zu empfangen wird eine Steuerungselektronik benötigt.
Die Steuerungselektronik besteht aus drei verschiedenenen Platinen: Dem Mikrocontroller, Ein- und Ausgänge und die Motoransteuerung.
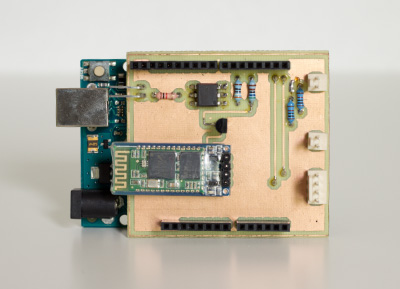
Als Mikrocontroller wurde der Arduino Uno ausgewählt, da der Schaltplan wie auch der Quellcode frei verfügbar sind. Die erste Platine, welche in der HTL Mössingerstraße
gefertig wurde, beinhaltet das Blutooth Modul und mehrere Steckplätze für das Display, Endschalter, und auch für die Kamera. Motortreiber wie auch die Spannungsversorgung
befinden sich auf der letzten Platine.
Um die Kommunikation zwischen Smartphone und dem Mikrocontroller zu regulieren wird ein Kommunikationsprotokoll benötigt.
Byte 0
Modus
Byte 1-2
Anzahl der Aufnahmen
Byte 3-4
Verschlusszeit der Kamera
Byte 5-6
Pausenzeit [ms]
Byte 7
Länge Linear [%]
Byte 9-10
Winkel [°]
Byte 11
Start Rotation [%]
Byte 12
Ende Rotation [%]
Das erste Byte gibt an um welchen Modus es sich bei der Aufnahme handelt. Hierbei wird zwischen einer BULB-Aufnahme und einer Aufnahme,
in welcher die Verschlusszeit direkt an der Kamera eingestellt wird, unterschieden. Eine weitere Information, welche für die Aufnahme wichtig ist, ist die Pausenzeit
zwischen jeder Aufnahme. Diese kann auch null sein, wenn nach jeder Aufnahme sofort die nächste folgt.
Das Protokoll verwendet die Android-Applikation um die Informationen an den Mikrocontroller zu senden. Der Mikrocontroller wertet diese Daten aus und verwendet sie
um die Aufnahme zu erstellen.
Ein- und Ausgänge
In diesem Teil der Details werden die Ein- und auch die Ausgänge näher erläutert.
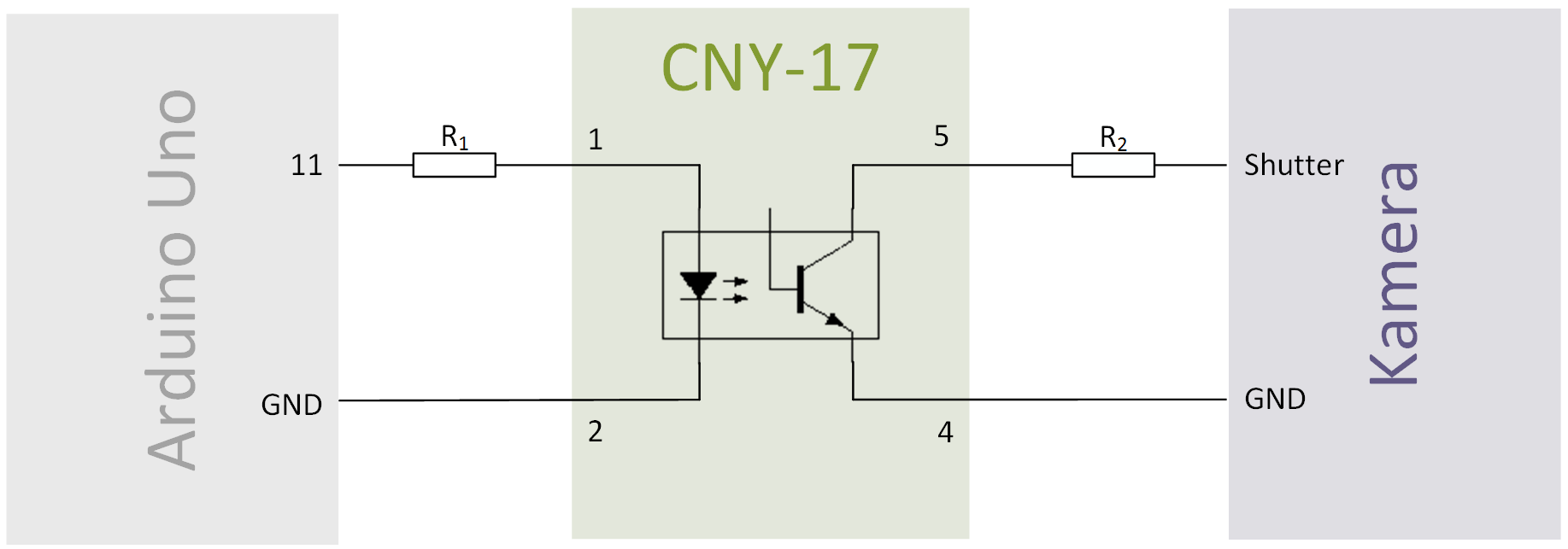
Kameraansteuerung
Da es unzählige Formen und Wege gibt den Auslösemechanismus von Kameras zu betätigten, wurde sich auf Spiegelreflexkameras mit 2.5 mm Klinkenbuchsen vom
Hersteller Canon entschieden. Wird die Spitze mit dem Schaft des Klinkensteckers verbunden, löst die Kamera aus. Um diese Verbindung digital zu öffnen und zu schließen wurde der
Optokoppler CNY-17 verwendet, um die Spannungen galvanisch zu trennen.
Endschalter
Da nach Einschalten des Mikrocontrollers die Position des Schlittens unbekannt ist, muss der Schlitten Referenz fahren. Aus diesem Grund sind auf beiden
Seiten des Schlittens Endschalter angebracht.
LCD Display
Um den Benutzer den aktuellen Stand der Aufnahme mitzuteilen wurde ein LCD Display verwendet, welcher über den I2-Bus angesteuert wird.
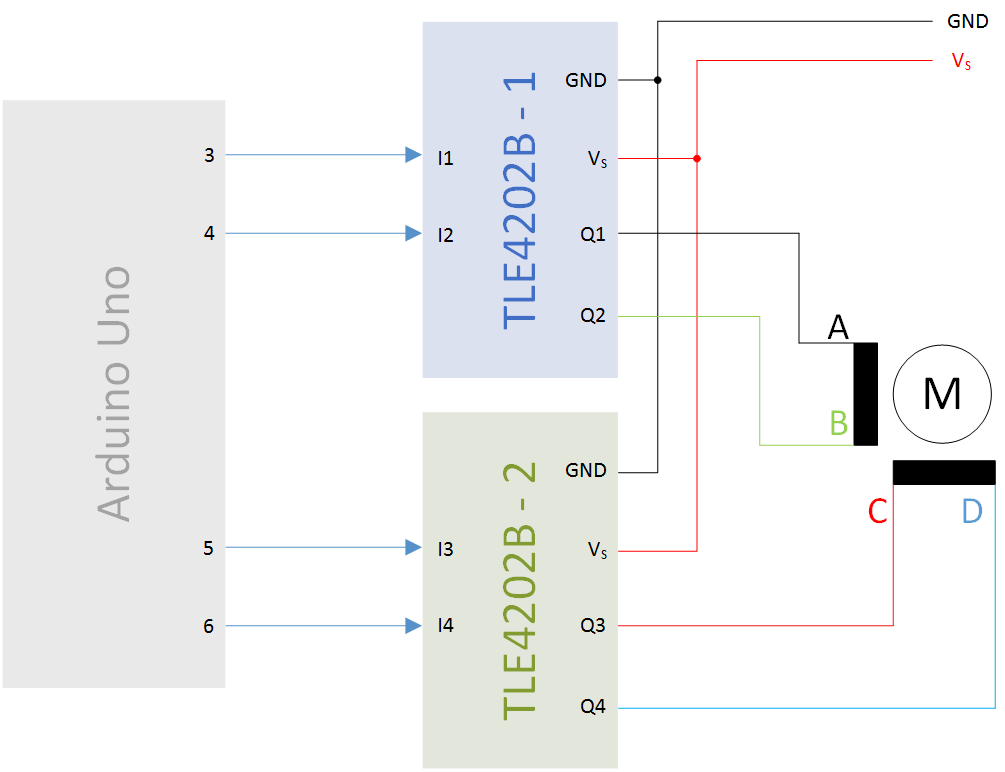
Ein wichtiger Teil sind die Motoren, sie dürfen keine Leistung im Stillstand verbrauchen aber müssen das nötige
Drehmoment in Bewegung aufbringen können.
Herkömmliche Schrittmotoren verbrauchen einiges an Leistung für das Haltemoment. Um aber bei Stillstand des Schlittens keinen
Strom für die Motoren zu verbrauchen, wurden Schrittmotoren mit Planetengetriebe ausgewählt. Angesteuert werden die Schrittmotoren mit dem Motortreiber TLE4202B,
da diese mit 5V, welche die Powerbank maximal liefern kann, arbeiten können.
Schrittmotor: Phidgets NEMA-11 Bipolar Stepper with 100:1 Gearbox
Module: Motortreiber TLE4202B
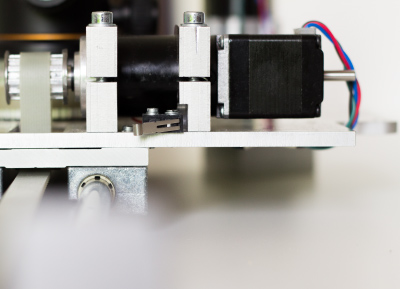
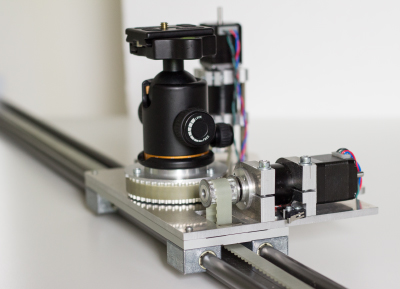
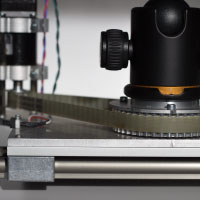
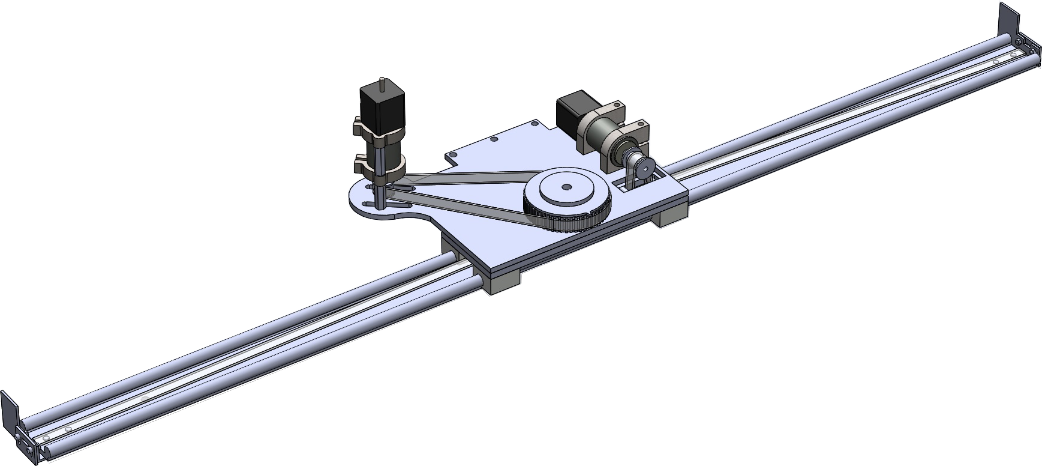
Mechanischer Aufbau
Für den mechanischen Teil der Arbeit war die Adaption des Schlittens sowie die Einbindung des Antriebs zu realisieren.
Als Grundlage für den mechanischen Aufbau dient die Schiene inklusive Schlitten der Firma Igus. Auf der Schiene wurde ein Riemen befestigt
welcher mit Hilfe zweier Umlenkrollen mit einem Schrittmotor verbunden wird. Für die Schwenkbewegung der Kamera wurde eine Kugellagerhalterung in den Schlitten gepresst
um somit ein Kugellager mit Zahnriemenscheibe zu befestigen. Verbunden wurde die Zahnriemenscheibe mit dem Motor wie bei der Linearbewegung über einen Zahnriemen.
Software: Solid Works
Schiene: Igus WS-10-40 1000mm
Schlitten: Igus WW-10-40-20 200x73mm
Impressum
Angaben gemäß § 5 TMG
Tobias Bürger
Vertreten durch:
Tobias Bürger
Kontakt:
E-Mail: contact@tobiasbuerger.at
Aus datenschutzrechtlichen Gründen behält der Inhaber dieser Website es sich vor, seine Adresse nur auf Anfrage zu teilen.
Verantwortlich für den Inhalt nach § 55 Abs. 2 RStV
Die Inhalte unserer Seiten wurden mit größter Sorgfalt erstellt. Für die Richtigkeit, Vollständigkeit und Aktualität der Inhalte können wir
jedoch keine Gewähr übernehmen. Als Diensteanbieter sind wir gemäß § 7 Abs.1 TMG für eigene Inhalte auf diesen Seiten nach den allgemeinen
Gesetzen verantwortlich. Nach §§ 8 bis 10 TMG sind wir als Diensteanbieter jedoch nicht verpflichtet, übermittelte oder gespeicherte fremde
Informationen zu überwachen oder nach Umständen zu forschen, die auf eine rechtswidrige Tätigkeit hinweisen. Verpflichtungen zur Entfernung
oder Sperrung der Nutzung von Informationen nach den allgemeinen Gesetzen bleiben hiervon unberührt. Eine diesbezügliche Haftung ist jedoch
erst ab dem Zeitpunkt der Kenntnis einer konkreten Rechtsverletzung möglich. Bei Bekanntwerden von entsprechenden Rechtsverletzungen werden
wir diese Inhalte umgehend entfernen.
Haftung für Links
Unser Angebot enthält Links zu externen Webseiten Dritter, auf deren Inhalte wir keinen Einfluss haben. Deshalb können wir für diese fremden
Inhalte auch keine Gewähr übernehmen. Für die Inhalte der verlinkten Seiten ist stets der jeweilige Anbieter oder Betreiber der Seiten verantwortlich.
Die verlinkten Seiten wurden zum Zeitpunkt der Verlinkung auf mögliche Rechtsverstöße überprüft. Rechtswidrige Inhalte waren zum Zeitpunkt der
Verlinkung nicht erkennbar. Eine permanente inhaltliche Kontrolle der verlinkten Seiten ist jedoch ohne konkrete Anhaltspunkte einer Rechtsverletzung
nicht zumutbar. Bei Bekanntwerden von Rechtsverletzungen werden wir derartige Links umgehend entfernen.
Urheberrecht
Die durch die Seitenbetreiber erstellten Inhalte und Werke auf diesen Seiten unterliegen dem österreichischem Urheberrecht. Die Vervielfältigung,
Bearbeitung, Verbreitung und jede Art der Verwertung außerhalb der Grenzen des Urheberrechtes bedürfen der schriftlichen Zustimmung des
jeweiligen Autors bzw. Erstellers. Downloads und Kopien dieser Seite sind nur für den privaten, nicht kommerziellen Gebrauch gestattet.
Soweit die Inhalte auf dieser Seite nicht vom Betreiber erstellt wurden, werden die Urheberrechte Dritter beachtet. Insbesondere werden
Inhalte Dritter als solche gekennzeichnet. Sollten Sie trotzdem auf eine Urheberrechtsverletzung aufmerksam werden, bitten wir um einen
entsprechenden Hinweis. Bei Bekanntwerden von Rechtsverletzungen werden wir derartige Inhalte umgehend entfernen.
Datenschutz
Die Nutzung unserer Webseite ist in der Regel ohne Angabe personenbezogener Daten möglich. Soweit auf unseren Seiten personenbezogene Daten
(beispielsweise Name, Anschrift oder eMail-Adressen) erhoben werden, erfolgt dies, soweit möglich, stets auf freiwilliger Basis. Diese Daten
werden ohne Ihre ausdrückliche Zustimmung nicht an Dritte weitergegeben.
Wir weisen darauf hin, dass die Datenübertragung im Internet (z.B. bei der Kommunikation per E-Mail) Sicherheitslücken aufweisen kann.
Ein lückenloser Schutz der Daten vor dem Zugriff durch Dritte ist nicht möglich.
Der Nutzung von im Rahmen der Impressumspflicht veröffentlichten Kontaktdaten durch Dritte zur Übersendung von nicht ausdrücklich angeforderter
Werbung und Informationsmaterialien wird hiermit ausdrücklich widersprochen. Die Betreiber der Seiten behalten sich ausdrücklich rechtliche Schritte
im Falle der unverlangten Zusendung von Werbeinformationen, etwa durch Spam-Mails, vor.