We want to show that it is possible to build low cost autonomous UAVs.
By using existing open source frameworks and intelligent algorithms it is possible to achieve this with cheap hardware components and little effort.
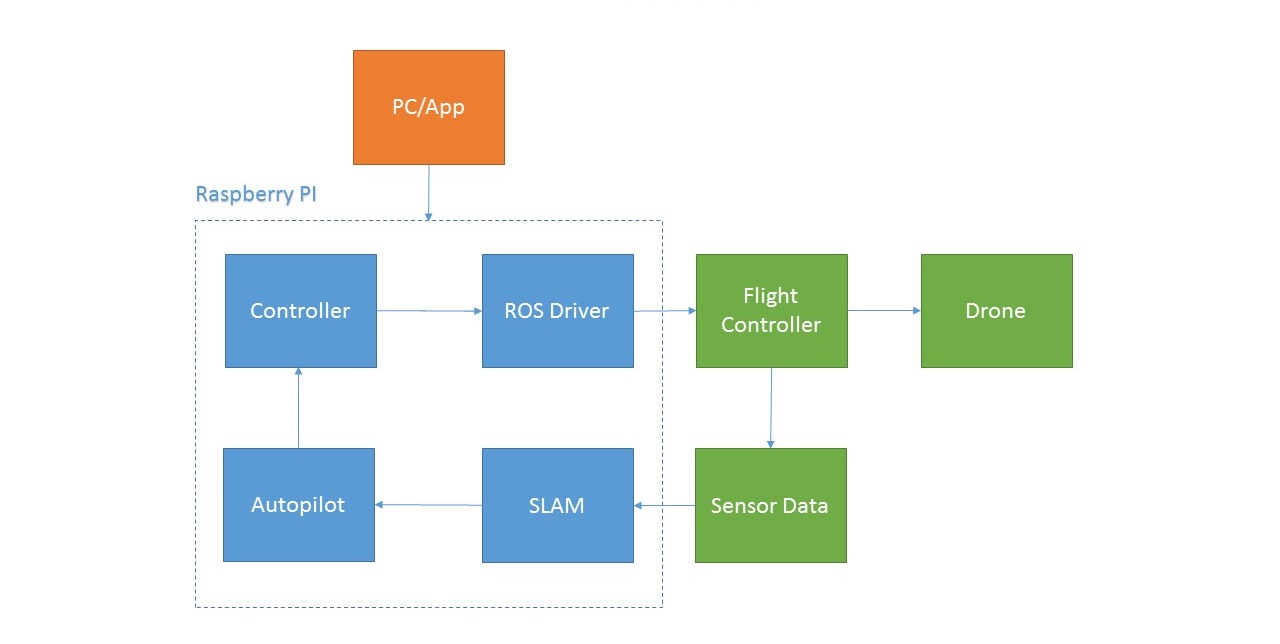
Our task is the development of a cross platform system for UAVs (Unmanned Arial Vehicle) to deliver packages. With our system it will be possible to upgrade existing plain UAVs to make them smarter and capable for autonomous flight. We employ computer vision, various sensors and a powerful computing unit, to allow UAVs finding a path between two given coordinates, detecting obstacles and avoiding collisions. In a showcase we demonstrate a mobile application, users use to mark landing zones and get notified on incoming deliveries.
All hardware and software components developed by each of the project’s members should be implemented and fully functional. At the end of our project all components will be merged, so that as a result there is a fully working prototype. In a demonstration the UAV will fly to a certain destination on request of a user.

Computer Vision

User interaction

Hardware engineering

Autonomous flight control
