Julia Ottitsch
Erstellung Schaltplan, Motorik

Deutsch Der Balancefan hat das Ziel einen Regelkreis darzustellen.Er ist als Übungsobjekt im Unterrichtsgegenstand Messtechnik gedacht. Der Balancefan nimmt die Form einer Wippe an. Am Ender einer langen Stange ist ein Gleichstrommotor befestigt. Dieser bewegt die Stange auf und ab. In der Mitte der Stange befindet sich ein Beschleunigungssensor. Er misst den Winkel und gibt eine entsprechende Spannung zurück. Durch einen PID Regler wird die Spannungszufuhr geregelt. Ein modifiziertes Motorboard wird zur Steuerung als Interface verwendet.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
![]()
English The balance fan has the goal to represent a loop. He is inteded as a practice object in the subject of measurement. The Balance Fan takes the form of a seesaw. A DC motor is attached to the end of a long rod. This moves the rod up and down. In the middle of the pole there is an acceleration sensor. He measures the angle and returns a corresponding voltage. A PID controller regulates the voltage supply. A modified Mototboard is used as an Interface .
Hier werden die Details des Projektes in den verschiedenen Stadien erklärt

In dem Bild sieht man die derzeitige Mechanik des Balancefans. Das Gewicht am Ende der Stange dient zum Ausbalancieren der Stange. Der Beschleunigungssensor ist noch nicht weiter verkabelt. Der Sensor misst die Veränderungen an der Y-Achse.

Hier sieht man das in Draft Sight erstellte Oberflächenlayout. Das Design ist einem Regelkreis nachempfunden. Die Spannung - und damit die Position der Stange - ist am Anfang einzustellen. Von dieser Spannnung wird die momentane Spannung abgezogen. Das Ergebnis wird in den Regler geführt. Von dort geht es weiter in die Regelstrecke, wo eine zusätzliche Störung in Form einer LED hinzugeführt wird. Das Resultat ist die Ausgangsspannung, die wiederum zurückgeführt wird, um die Position der Stange weiter zu verfeinern. Die LED-Reihen dienen dazu den Soll-Wert(die erwünschte Position) und den Ist-Wert(die momentane Position) darzustellen.
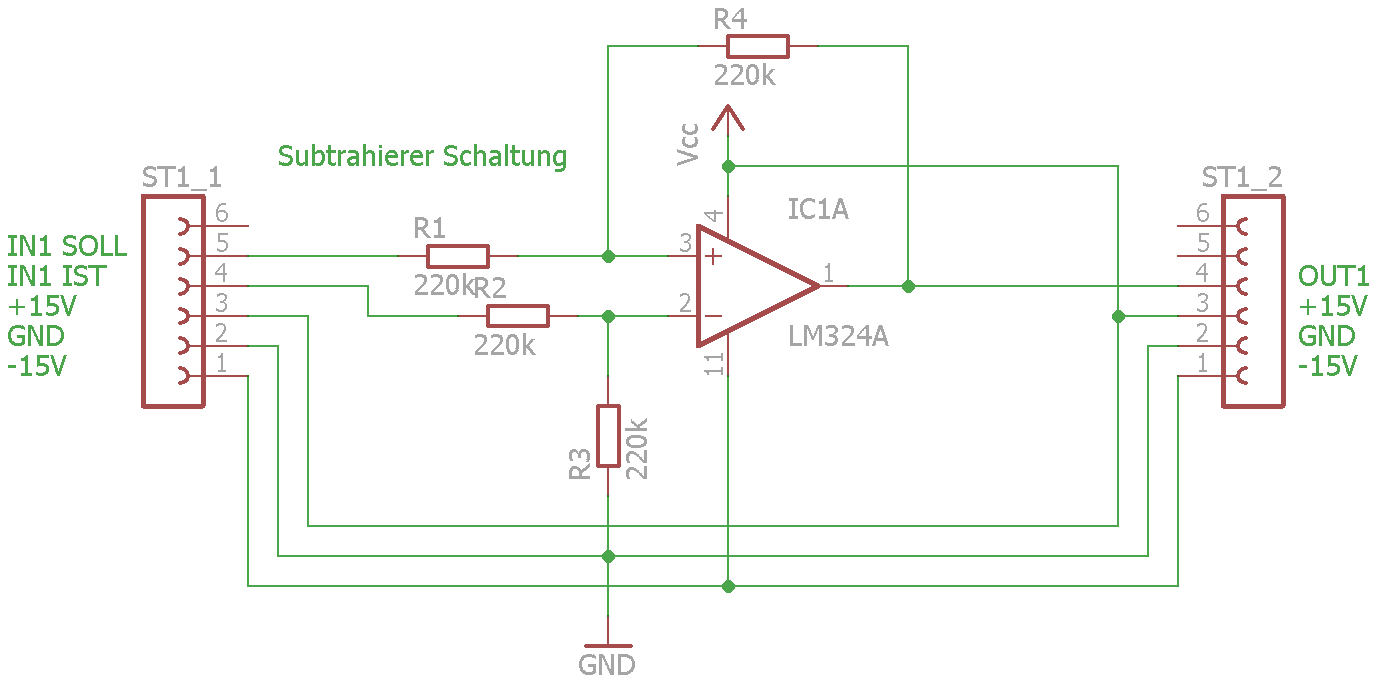
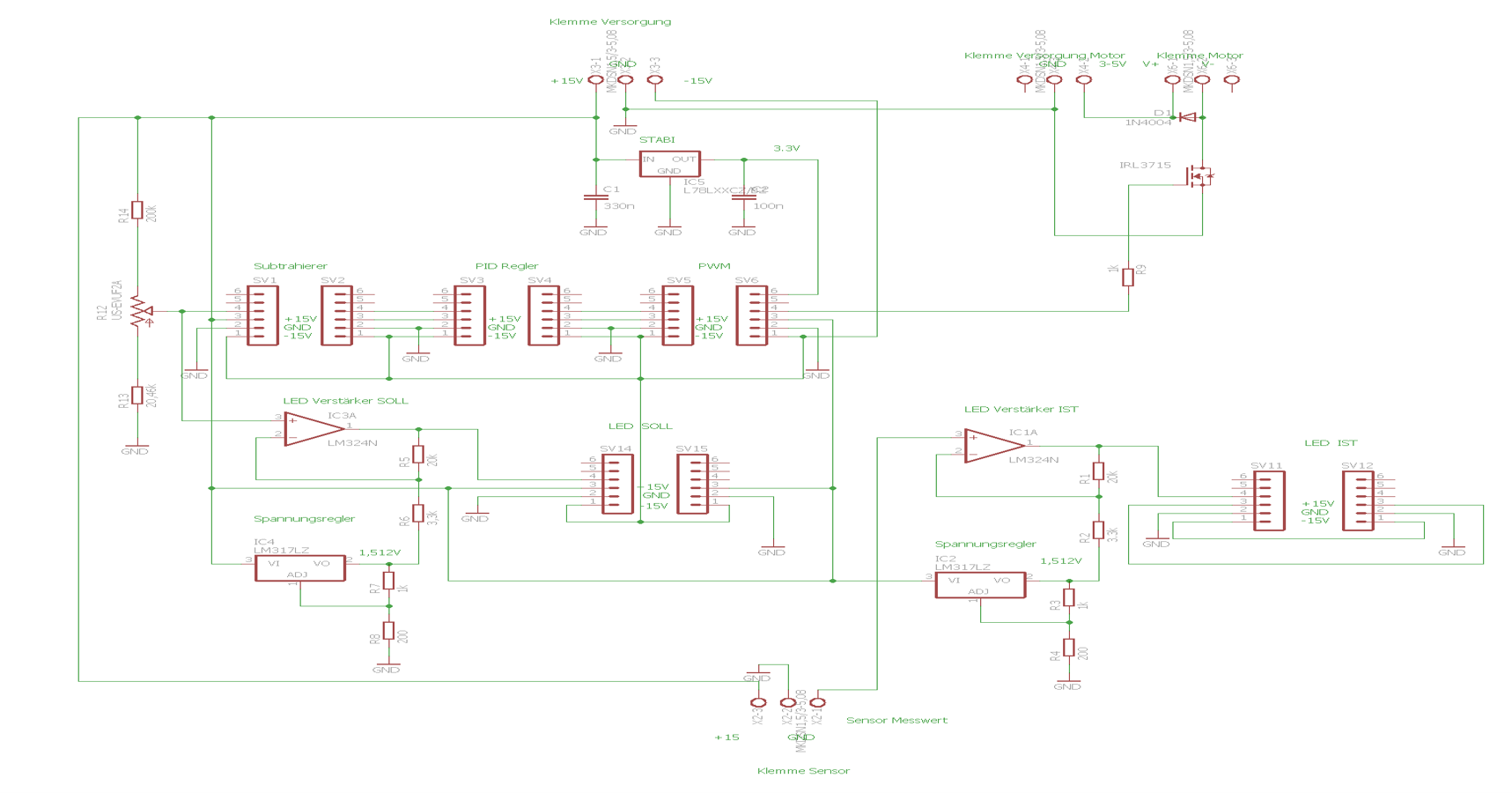
Der Schaltplan zeigt einen Subtrahierer. Dieser nimmt den Ist-Wert - Eingang 1 - der Spannung und zieht ihn vom Soll-Wert - Eingang 2 - ab. Die Differenz von Ist- zu Soll-Wert wird weitergegeben.
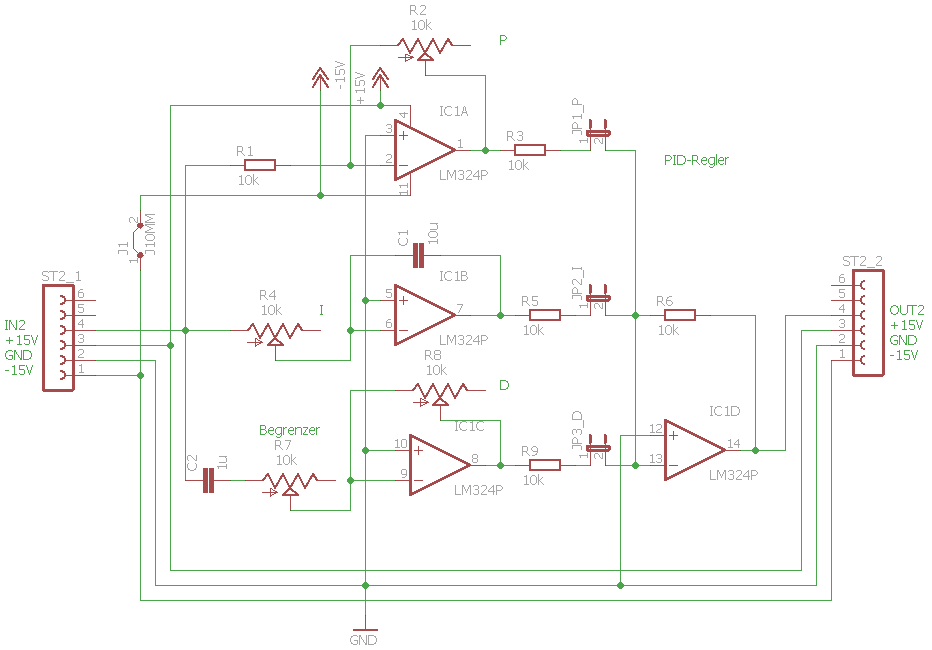
Anbei findet sich der Schaltplan eines paralellen PID-Reglers. Bei diesem sind die P, I und D Anteile paralell geschalten. Die Spannnung, welche am Eingang von dem
Subtrahierer übernommen wird, wird von den einzelnen P-,I- und D-Anteilen addiert und durch einen Summierverstärker zum Ausgang geleitet.
PID-Regler sind eine Kombination aus P, I & D Reglern. Sie werden vor allem dann verwendet, wenn ein Ausregeln auf den Sollwert und eine hohe
Regeldynamik gebraucht werden.
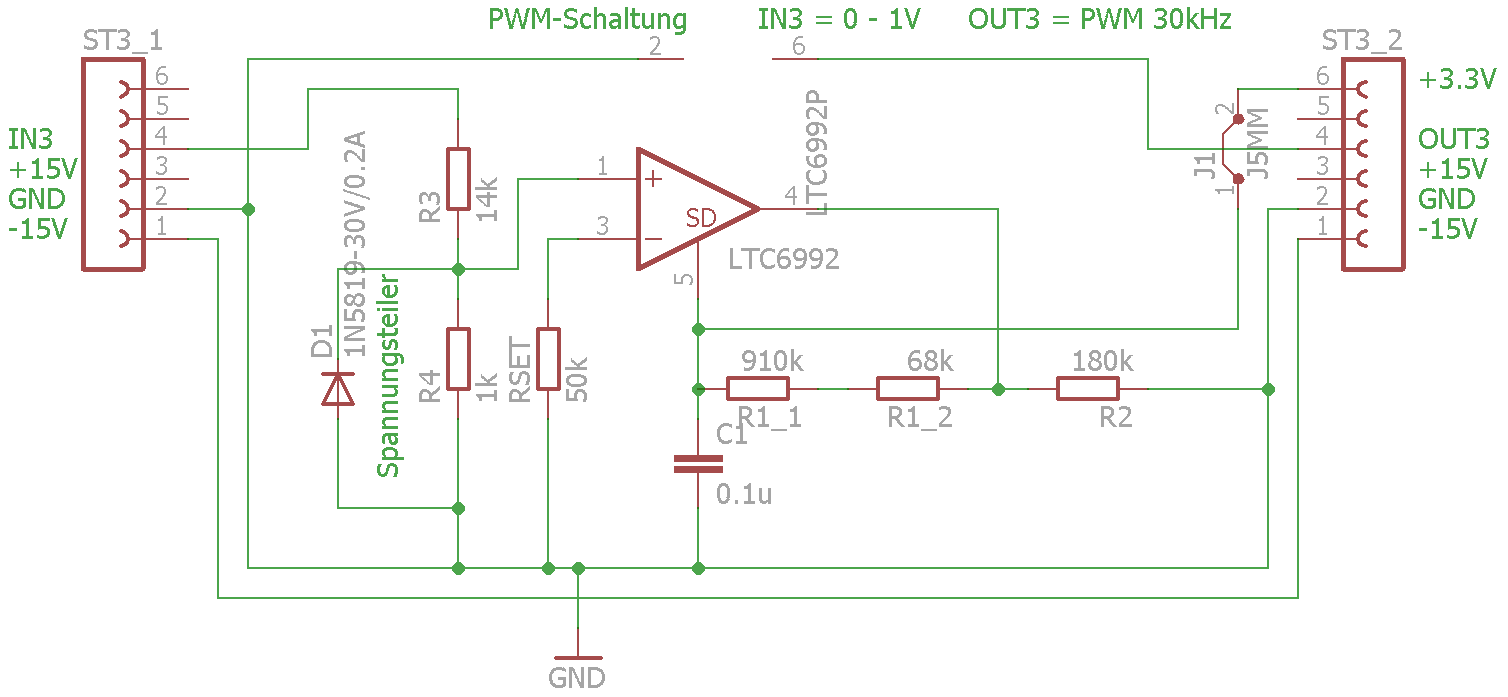
Die Strecke wird mit einer Puls-Weiten-Modulation(PWM) umgesetzt. Eine PWM dient der Übertragung von Signalen. Dabei werden Daten in elektrische Signale umgewandelt. Die Dauer der Signalpulse hängt von den Daten ab.
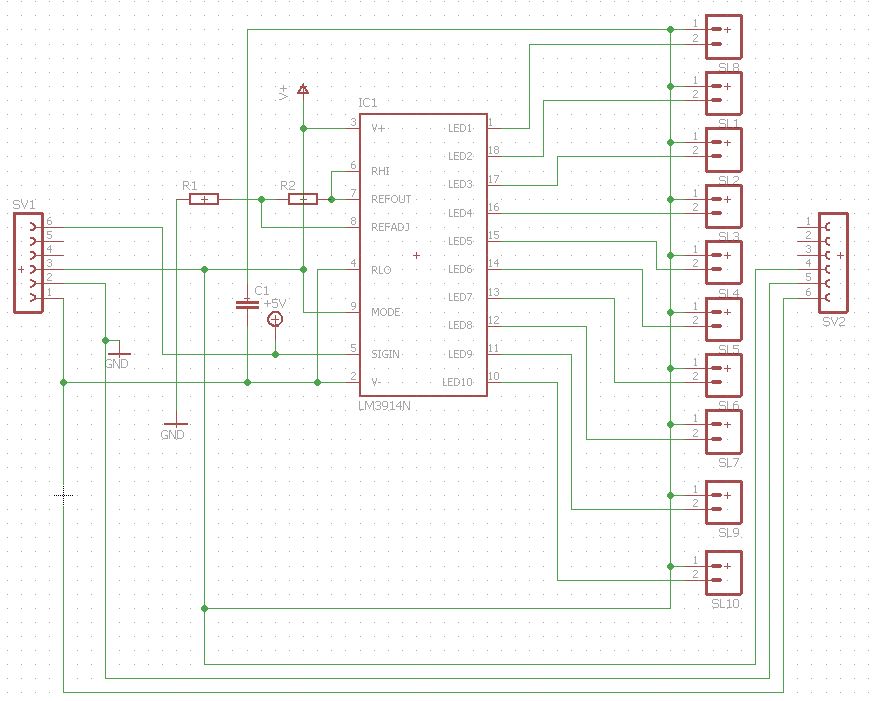
Dieser Schaltplan erzeugt die LED-Anzeigen. Es werden 2 Platinen benötigt- eine für jede Anzeige. Die erste Anzeige beschreibt den Soll-Wert, die zweite den Ist-Wert. Eine LED-Anzeige besteht aus je 10 hintereinander gesetzten LEDs. Je höher die Spannung, desto mehr LEDs werden eingeschaltet.
Die Basisplatine dient dazu die einzelnen Platinen auf eine gesamte Platine zu stecken. Somit hat man dann die gesamte Regelung auf einer Platine.
Dadurch, dass man so viele einzelne Platinen hat, kann man Fehler, falls diese vorhanden sind, schneller ausfindig machen. Man kann dann die Fehler auch schneller
korrigieren und muss somit nicht eine große Platine neu machen.

