Ausgangslage
Der Betrieb eines konventionellen Computertomografens (CTs) ist weder aus ökonomischer noch aus sicherheitstechnischer Sicht an einer Schule möglich. Um den Schüler/innen der Abteilung Biomedizin- und Gesundheitstechnik im Laborunterricht das Prinzip eines CTs praktisch näher bringen zu können, soll ein kostengünstiger Tomograf entwickelt werden, der mit sichtbarem Licht arbeitet.
Zielsetzung
Mithilfe des Licht-Tomografens sollen innere Strukturen eines semitransparenten Objektes dreidimensional erfasst und auf einem PC dargestellt werden. Das Funktionsprinzip soll dabei jenem eines konventionellen CTs entsprechen, wobei das Röntgenlicht durch nichtionisierendes sichtbares, und somit ungefährliches, Licht ersetzt wird.
Funktionsweise
Durchleuchtung („Röntgenaufnahme“): Ein semitransparentes Objekt wird mit einer Weißlichtquelle aus unterschiedlichen Richtungen durchleuchtet.
Rekonstruktion: Mittels der sogenannten inversen Radontransformation wird eine 3D-Rekonstruktion des Objekts berechnet, welche am Computer dargestellt werden kann.
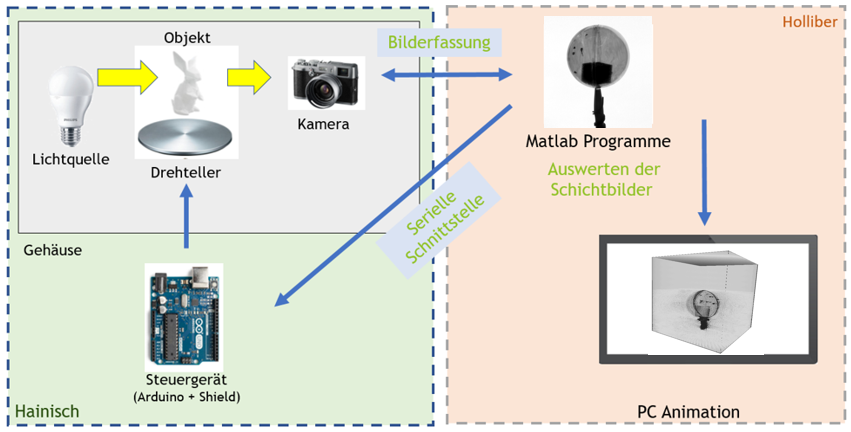
Systemsübersicht
Rekonstruktion der Schnittbilder
Durch die Aufnahmen der Bilder aus allen Richtungen (zwischen 0° und 180°) kann der programmierte Rückprojektionsalgorithmus aufgrund der verschiedenen Absorptionswerte auf die unterschiedlichen Schichtbilder rückrechnen. Dieser Algorithmus verwendet dabei die Radon - Transformation.
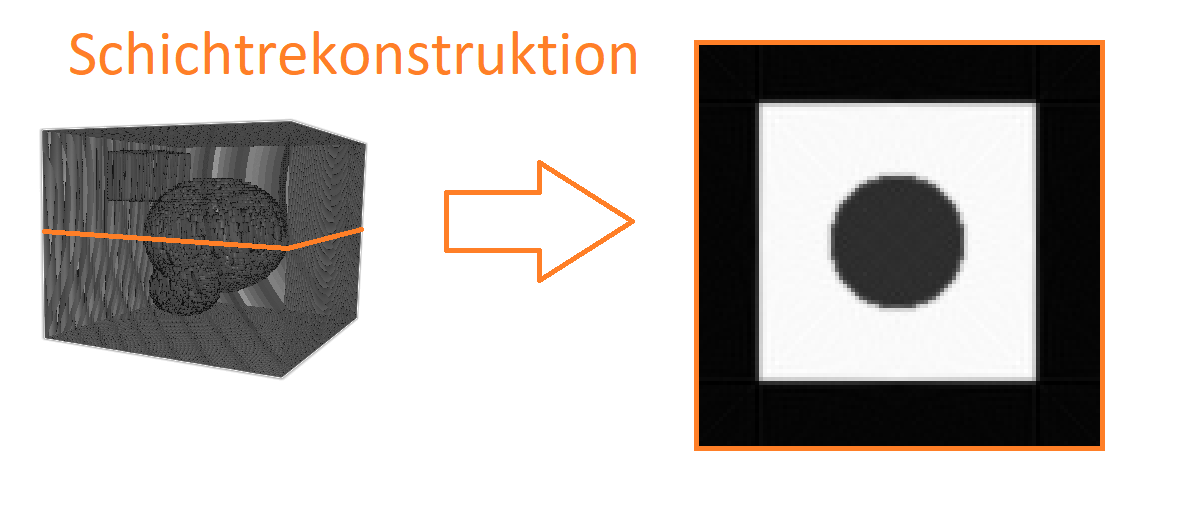
Unser reales Objekt, welches im Prototyp verwendet wird, ist eine Kugel mit einem Schaumstoffquader darin (siehe Bild).

Visualisierung
Mithilfe einer speziellen Visualisierungssoftware, können die entstandenden Schnittbilder durch so genanntes Volume Rendering (bezeichnet das Umwandeln von Pixel in Voxel) im dreidimensionalen Raum dargestellt werden. Mithilfe der maximalen Intensitäten lässt sich das Objekt, wie im unteren Bild ersichtlich, darstellen.

Automatisierte Bildaufnahme
Zur Hardware des Lichttomografen zählt die Ansteuerung von einem Schrittmotor, welcher einen Drehteller in Rotation versetzt und dafür sorgt das ein Objekt zum richtigen Zeitpunkt im passenden Winkel, von einem Aufnahmegerät erfasst werden kann. Zusätzlich werden Positionierungssysteme erstellt, die dafür sorgen, dass mit der idealen Tiefenschärfe aufgenommen werden kann. Hier ist auch der passende Abstand zu beachten.
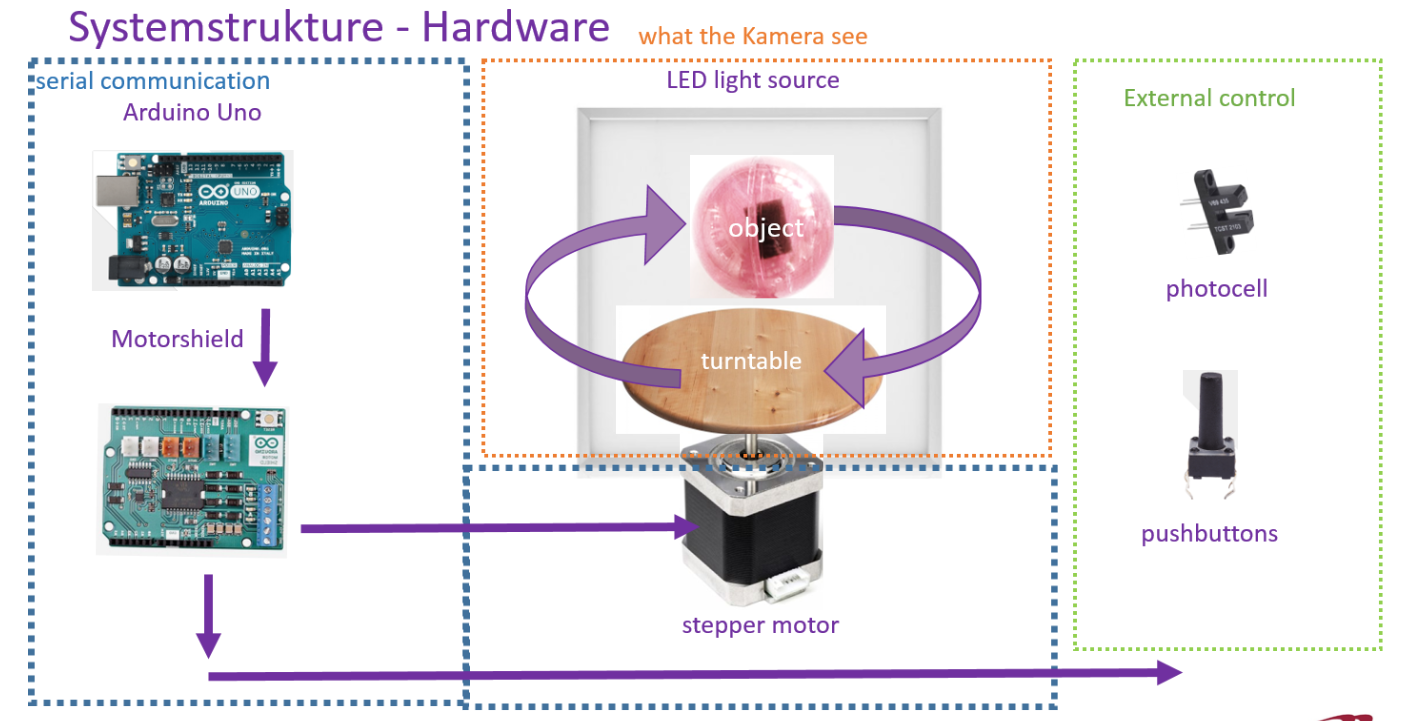
In der Abbildung sieht man die Systemstruckture der Hardware, diese besteht aus der seriellen Kommunikation, der Aufnahme des Objektes und der externen Steuerung
Arduino Code
Das Software Programm zur Steuerung und Initialisierung von veränderbaren Variablen, wurde in der Arduino DIE erstellt. Zur besseren Überschaubarkeit wurde eine Bibliothek angefertigt, mit der ein Objekt erstellt wird und dieses auf die Library- Methoden Zugriff hat. Die zur Verfügung gestellten Methoden dienen einerseits zur internen Speicherung von Parametern, andererseits können auch Winkelschritte oder einzelne Schritte übergeben werden, die den Drehteller in die gewünschte Position bringt.
Team
Alexandra Hainisch
Schülerin
Automatisierte Bilderfassung
Tina Holliber
Schülerin
Rekonstruktion der Schnittbilder und Visualisierung
DI Dr. Pierre Elbischger
Projektleiter
Bildverarbeitung