Muhamed Jakubovic
Hardware
Platinenlayout, Lasten wählen, Gehäuse

Deutsch Die Firma Infineon Technologies AG zählt zu den weltweit größten Entwickler und Hersteller von Elektronik für die Autoindustrie.Neu wurden zwei Typen von Magnetfeldwinkel- und Linear-Hall-Sensoren zur Erfassung des Lenkwinkels und Lenkmoments in EPS-Systemen (Servolenkung) entwickelt. Es ist unerlässlich, dass die Eigenschaften dieser neuen Entwicklungen korrekt zu den im Datenblatt spezifizierten Kennwerte sind. In der Anwendung sollen meist bis zu vier dieser Sensoren, auch unterschiedlichen Typs, gemeinsam auf einen Bus geschaltet werden. Es ist also erforderlich, dass die Sensoren gemeinsam auf einem Bus arbeiten und ausgelesen werden können, ohne dass diese einander bei der Datenverarbeitung und -Übertragung stören. Weiters muss die Funktionsfähigkeit dieser Sensoren vor dem Verkauf bei Kunden vorgeführt werden. Unser Projekt baut darauf auf, im Zuge der genannten Problemstellung einen Demonstrator zu entwickeln, der die spezifizierten Eigenschaften (maximale kap. Lasten, Pull-Up Widerstände) der Sensoren verifizieren und außerdem dem Kunden präsentiert werden kann. Die Sensoren werden über einen One-Wire Bus mit einem Microcontroller verbunden, der die Daten ausliest, und über ein GUI (Graphical User Interface) übersichtlich darstellt. Über das GUI soll die Konfiguration der Sensoren am Bus festgelegt werden. Weiters werden variable Pull-Up Widerstände und variable Last-Kapazitäten implementiert, die die Kabellänge simulieren sollen. Als Microcontroller verwenden wir zur Entwicklung des Projekts einen Arduino, später den firmeneigenen XMC Microcontroller.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Dieses Projekt wird gemeinsam mit einem Wirtschaftspartner durchgeführt:

English The company Infineon Technologies AG is one of the largest developer and producer for electronics in the automobile industry. Two new sensor types for magnetic field angle and for linear-hall were developed. These sensors are used for the measurement of steering angle and steering torque in EPS-Systems. It's cruicial that the specification of these sensores are correct and are equal to the ones in the datasheet. In an usage environment up to four (different) sensors should be connected to the same bus. So it's needed that the sensors can work together and you can read out the information without the sensors disrupting each other on the data processing and data transmission. Our duty in this project is to create a demonstrator, which can verify the specification (max. capacity, max. pull-up resistor) of the sensors and show it to the customer. The sensors are connected via a one-wire bus to a microcontroller, which reads the data, and display the read data on a GUI (graphical user interface). The configuration of the sensors should be done with the GUI. Furthermore the loads (capacity, resistance) can be selected on the GUI.
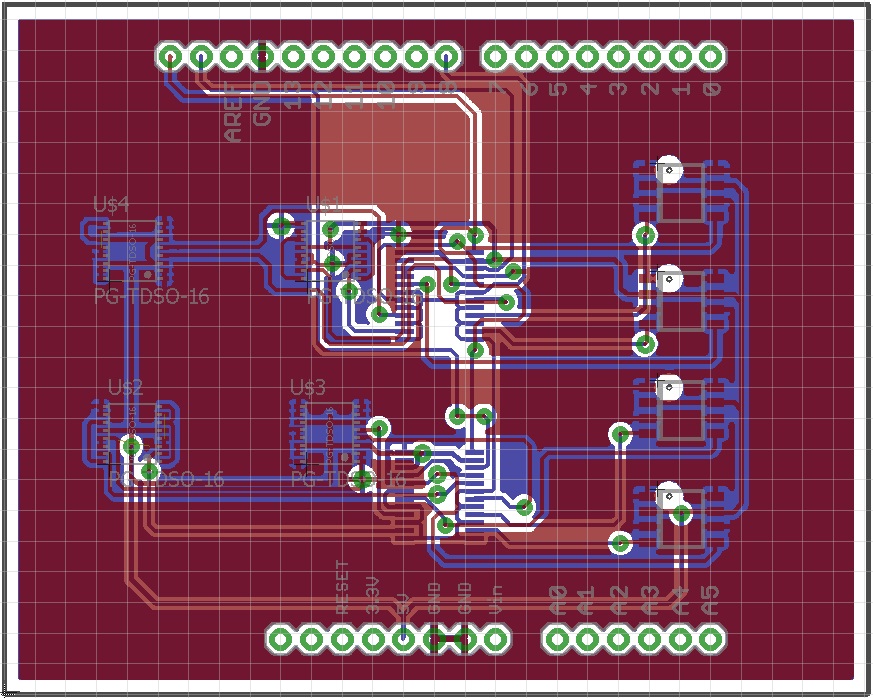
Es werden zwei separate Shields für den Microcontroller gefertigt. Zuerst das Shield für die Lasten, dann der Shield für die Sensoren. Die Lasten (Widerstand und Kapazität) werden einerseits mit einem digitalen Potentiometer und andererseits mit einer Kondensator-Matrix realisiert. Die Matrix lässt sich über einen digital Switch steuern und somit kann man die Kapazität beliebig wählen. Beide Bausteine lassen sich über den I2C-Bus ansteuern. Die Sensorplatine besteht aus zwei digital Switches und acht Infineon (Dual-)Sensorbausteinen, acht Drehwinkelsensoren und acht Linear-Hall-Sensoren. Die Switches werden so angesteuert, dass jeweils vier der insgesamt 16 Sensoren zusammengeschaltet werden und Daten erfasst werden können.
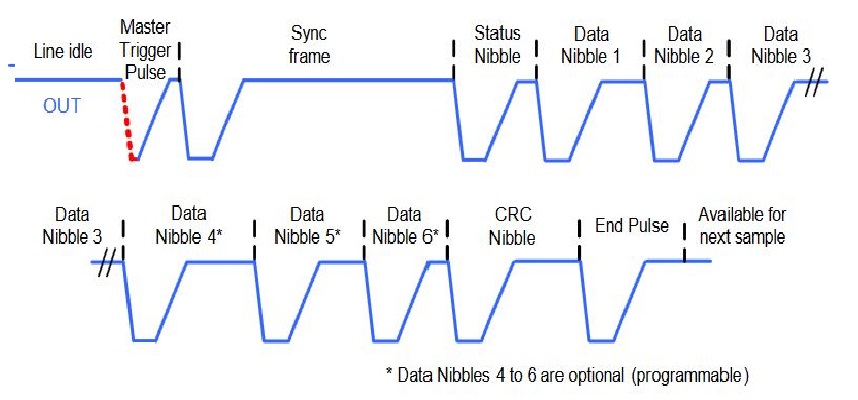
Um sicherzustellen, dass die Hardware im gewünschten Maße funktioniert und um die Lenkdaten übersichtlich auszugeben, soll eine Software realisiert werden, die in der Lage ist die verwendeten Sensoren anzusteuern, ihre Daten auszulesen und die simulierte Kablellänge der Übertragungsstrecke zwischen Sensor und Auswertgerät zu steuern.Zur Übertragung der Daten wird ein neuartiges Protokoll mit der Bezeichnung SPC (Short PWM Code, z.Dt.: Kurzer Puls-Weiten Modulierter Code) verwendet.Dieses Protokoll stellt eine schnelle, einfache und zuverlässige Kommunikation zwischen den Sensoren und dem Auswertgerät zur Verfügung.Während der Entwicklung dieser Software und zur Fehlerbehebung wird ein Microcontroller aus dem Hause Arduino als Auswertgerät verwendet. Später soll der XMC1100, ein Microcontroller der Firma Infineon im fertigen Demonstrator verwendet werden. Zur Ausgabe der Sensordaten und Festlegung der Kabellänge soll eine grafische Oberfläche realisiert werden, die über einen Computer bedient wird.

Platinenlayout, Lasten wählen, Gehäuse

Decodierung, Datenerfassung, GUI

Des is a Bursch
.