Daniel Spatzier
Projektverantwortlicher, Hardware und Design
Überarbeitet das Projekt so, dass es den neuesten Standards entspricht. Weiters erstellt er ein Gehäuse mit verbesserter Verkabelungen.
Deutsch Die Futtermaschine „Feedmaster 9000“ ist ein Modell einer Futtermaschine die in der Agrarwirtschaft eingesetzt wird. Diese Anlage muss von unserem Team wieder einsatzbereit und für den Unterricht nutzbar gemacht werden. Das "Tierfutter" befindet sich in vier Containern, links und rechts des Hauptförderbandes befinden sich jeweils 2 Einwurfstellen. Das Futter wird dann jeweils über einen Schrittmotor betriebenes Behälterförderband transportiert. Es gelangt zu einem Häcksler, der ebenfalls mit einem Schrittmotor angetrieben wird. Das Futter fällt nach dem häckseln auf das Hauptförderband. Dieses Förderband transportiert das Futter in den letzten Behälter. In diesem wird es durch einen Rotationsarm durchmischt und mittels DMS- Waage gewogen. Dieser Vorgang kann derzeit über die bestehende Anlagensteuerung (S7- 1200/Touchpanel) durchgeführt werden. Eine etwas reduzierte Funktionalität soll im Zuge des Projektes über ein Arduino – W- Lan Modul ermöglicht werden. Weiters soll der Anlagenzugriff über eine Hardwareschnittstelle realisiert werden, der den Zugriff mittels Logo Steuerung ermöglicht.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Dieses Projekt wird gemeinsam mit einem Wirtschaftspartner durchgeführt:

English The food machine "Feedmaster 9000" is a model of a forage machine used in agriculture. Our team will make this system ready for action again and also ready for the workshop training. The "animal feed" is in four containers, on the left and the right hand side of the main conveyor belt there are 2 throw points. The food in each container will be transported via a conveyor belt and they will be powered with stepper motors. It comes to a shredder, which is also powered by a stepper motor. The animal feed falls after the shredding on the main conveyor belt. This conveyor transports the feed into the last container. In the last container it will be mixed by a rotating arm and weighed by a strain gauge balance. This process can currently be carried out via the system control (S7-1200 / touch panel). A reduced functionality will be made possible in the course of the project via an Arduino W-Lan module. Furthermore, the system access should be realized via a hardware interface, which allows access via Logo control.
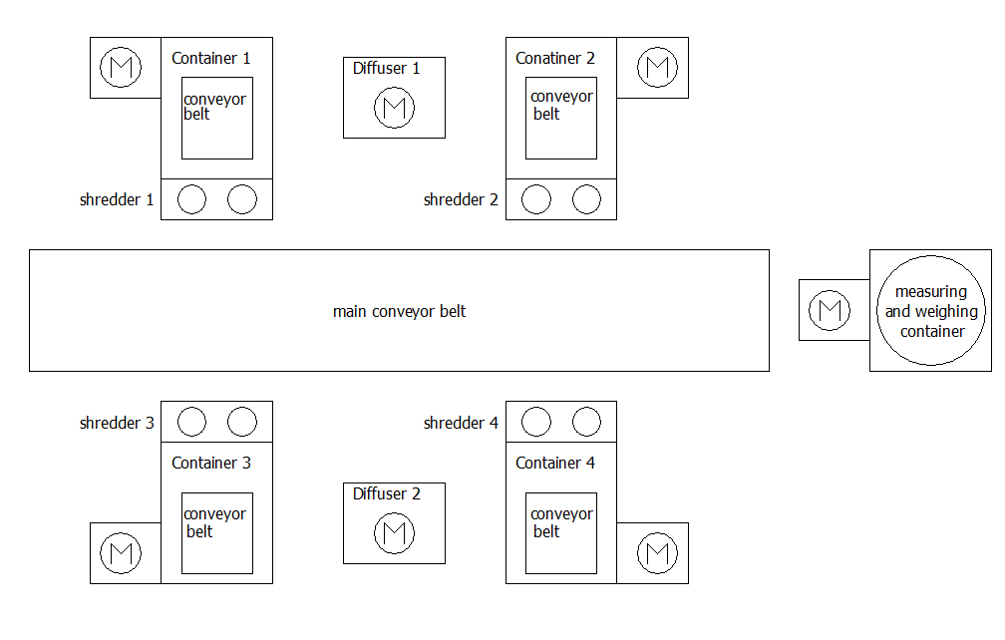
Das Projekt haltet vier unterschiedliche Futtersorten in vier seperaten Behältern mit jeweils einem Förderband. Die Menge, die die Futtermaschine mischen soll, wird mit einem Eingabegerät gesteuert. Wenn die Eingabe erfolgt ist, werden die vier Sorten zur Mitte transportiert. Bei diesem Vorgang wird das Futter mit, ebenfalls gesteuerten Häcksler, zerkleinert. Das zerkleinerte Futter wird mittels Hauptförderband dann in den Mischbehälter transportiert und im finalen Schritt auch gemischt.
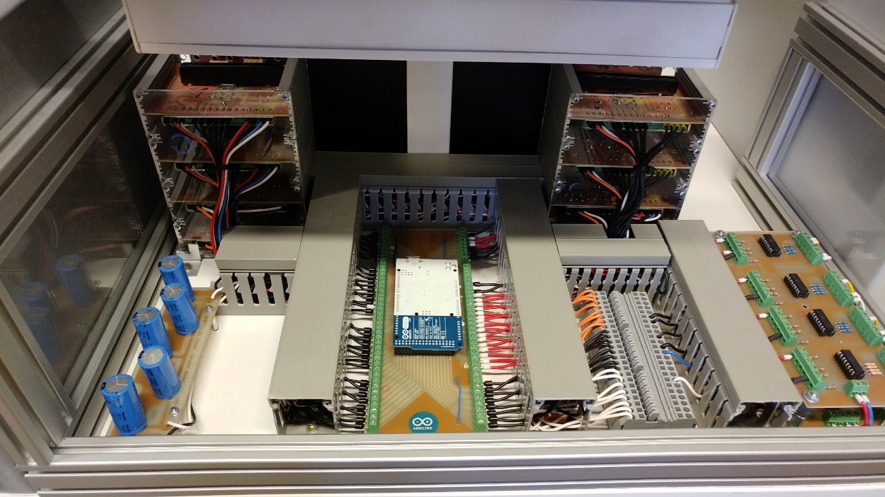
Auf dem Bild sehen Sie den größten Teil der Verkabelung. Die zwei großen Behälter, links und recht am Bild, sind mit den Treiberplatinen zur Motorsteuerung bestückt. Über die Kabelkanäle werden alle notwendigen Kabelwege gezogen. Zum Beispiel vom Treiber zum Arduino, oder vom Arduino zur Logo.

Überarbeitet das Projekt so, dass es den neuesten Standards entspricht. Weiters erstellt er ein Gehäuse mit verbesserter Verkabelungen.

Erneurt die Antriebssteuerung, sodass der Client zufrieden ist. Er ist außerdem verantwortlich für die Programmierung der Ansteuerung.

Herr Wertjanz überwacht die Situation des Projetes. Darüber hinaus ist er Anprechpartner für den Teilbereich Programmierung und Webdesign.

Herr Hubmann überwacht ebenfalls den Projektverlauf. Weiters unterstützt er das Projekt mit dem nötigen Know-How und stellt Arbeitsmaterial für das Projekt zur Verfügung.