Willkommen
Herzlich willkommen auf unserer Projektseite.
Auf dieser Homepage erhalten Sie Informationen rund um das Projekt
Optimal Positioning System.
Kurzbeschreibung
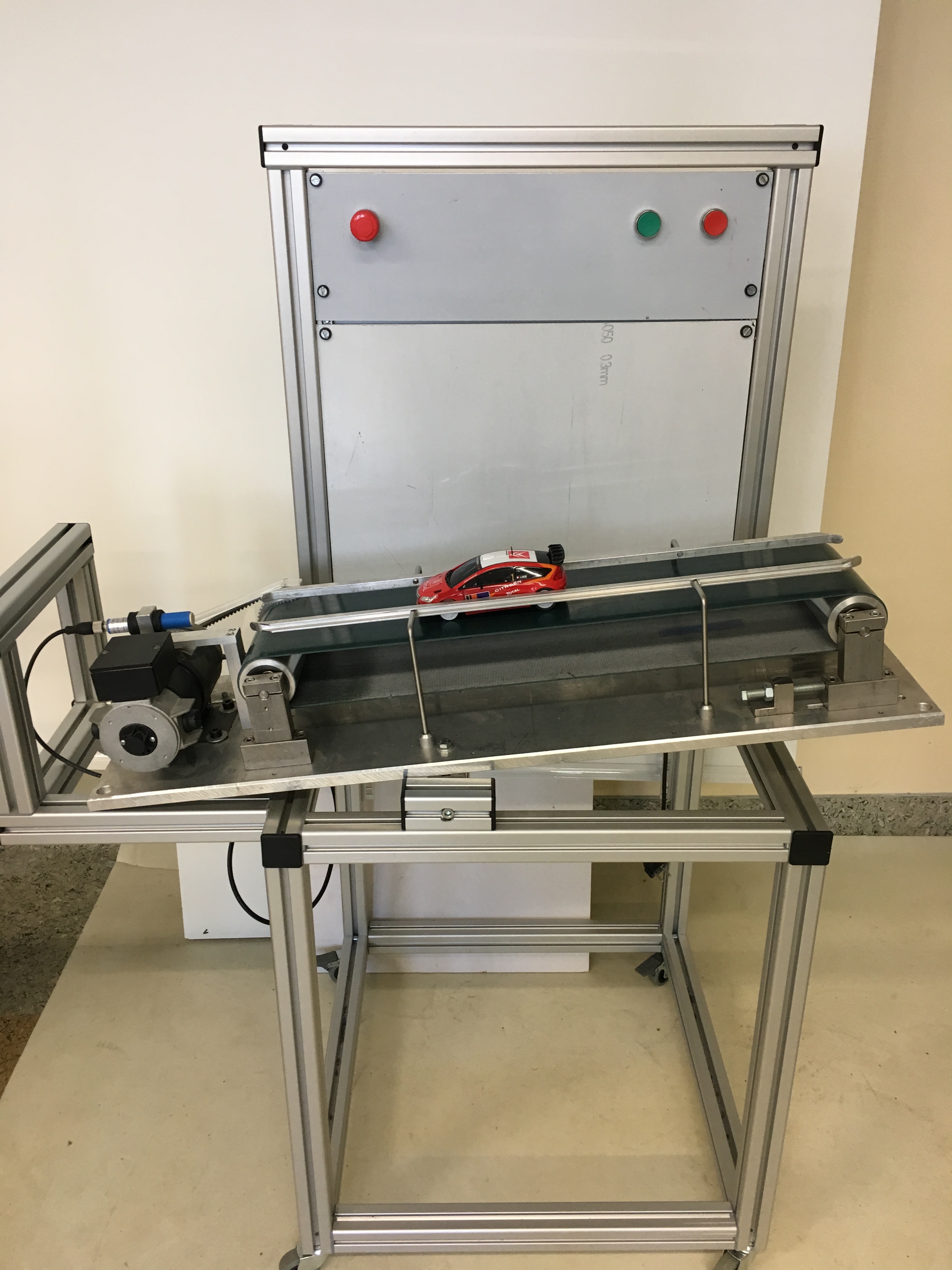
Das Projekt selbst besteht aus einem Förderband, welches ein selbstfahrendes Objekt (in unserem Fall „ein Spielzeugauto“)
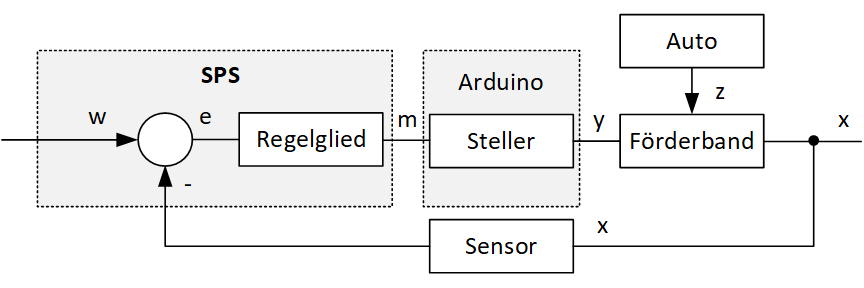
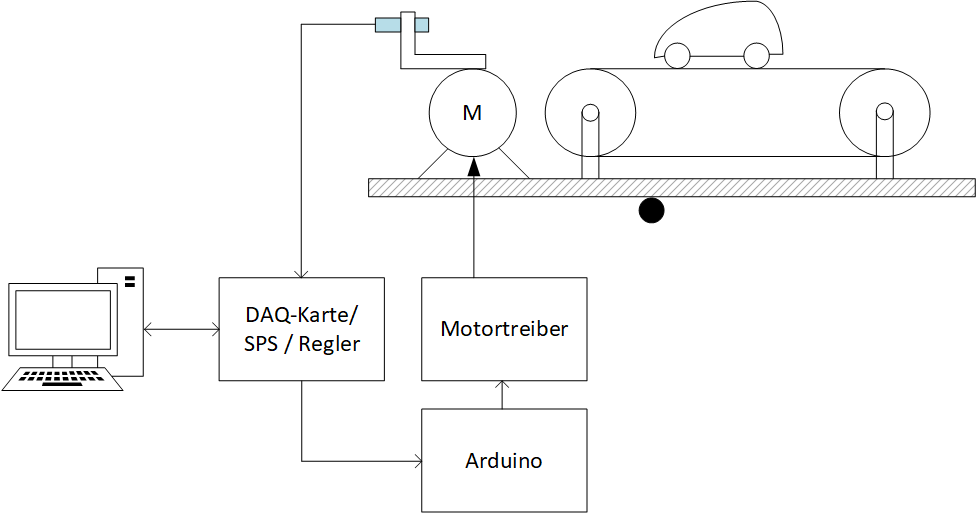
durch Geschwindigkeitsänderung auf Position haltet. Diese Position wird mittels eines Ultraschallsensors permanent gemessen und Signale werden
an eine SPS weitergeleitet und verarbeitet. Ein Arduino übernimmt die Motorsteuerung.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße