
Julia Sifrar
Näherungssensor und Übertrittskontrolle
Email: Julia.Sifrar@htl-klu.at
Deutsch Beim Weitsprung in der Leichtathletik ist neben der Anlaufdistanz und –geschwindigkeit der optimale Absprungpunkt am Absprungbalken von hoher Relevanz. Im Rahmen des Diplomarbeitsprojekts soll ein bildverarbeitungsbasiertes System zur Detektion des exakten Absprungpunktes am Absprungbalken entwickelt werden. Das System soll nach jedem Sprung ein unmittelbares Feedback an die Athleten liefern.
Das Messsystem soll den Absprungbalken mit einem Kamerasystem erfassen und die Distanz des Absprungpunktes zur Absprunglinie ermitteln und anzeigen. Der Übertritt der Absprunglinie soll zusätzlich mit einer Lichtschranke detektiert werden. Die Auswertealgorithmik ist mit der Entwicklungssoftware Matlab zu entwickeln. Das Gesamtsystem soll autonom auf einem Raspberry Pi System lauffähig sein.
English At the long jump, in the athletics, in addition to the ideal take-off, the distance and the speed, is very important. This final year project is a video based program, to detect the accurate take-off at the take-off board. The system gives a direct feedback to the athlete. The measuring system captures the take-off board with a camera and measures the distance between the take-off point and the scratch line. The passover at the scratch line is detected with a laser. The system is programmed with Matlab. The whole system runs autonomously and executable on a Raspberry Pi system.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Dieses Projekt wird gemeinsam mit dem LAC - Klagenfurt durchgeführt:

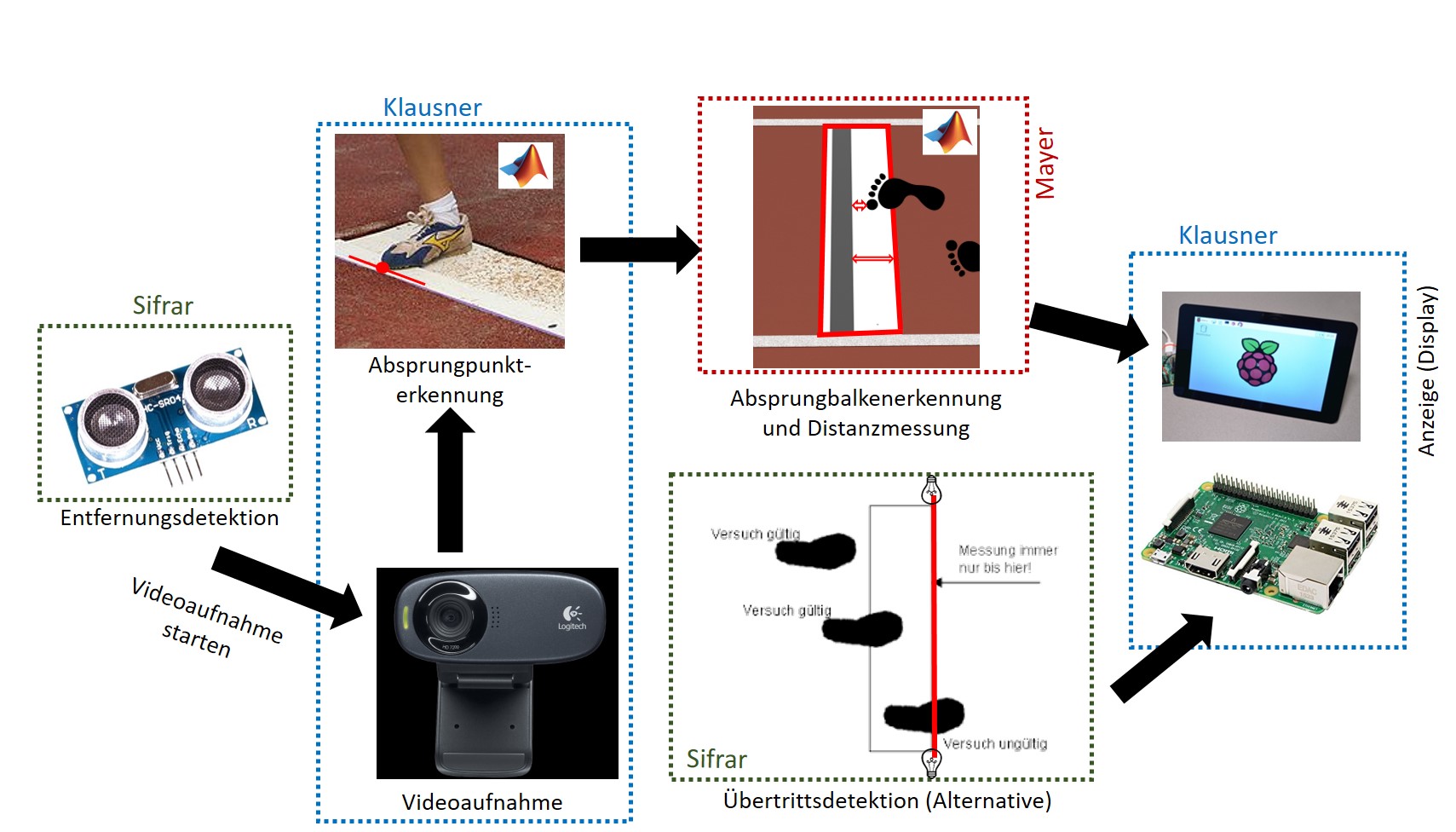
Auf dem Systemstrukturplan ist die Aufteilung des Projektes ersichtlich, welches sich in Hardware und Software aufteilt.
Die Hardware besteht aus einer Lichtschranke, einen Ultraschallsensor, einem Mikrocontroller und dessen Kamerasystem. Weiters ist die Software in die Balkenerkennung, Ruhepunktermittlung und der Distanzermittlung unterteilt.
Wichtig ist die Verbindung mit Matlab für ein autonomes System. Die Ausgabe erfolt durch ein Display des Mikrocontrollers.
In diesem Kapitel werden die Schritte der Hardware dokumentiert. Die einzelnen Schritte werden nur grob wiedergegeben.
Die Hardware besteht im aus einem Raspberry Pi, einer Kamera, dem Ultraschallsensor und dem Gehäuse.
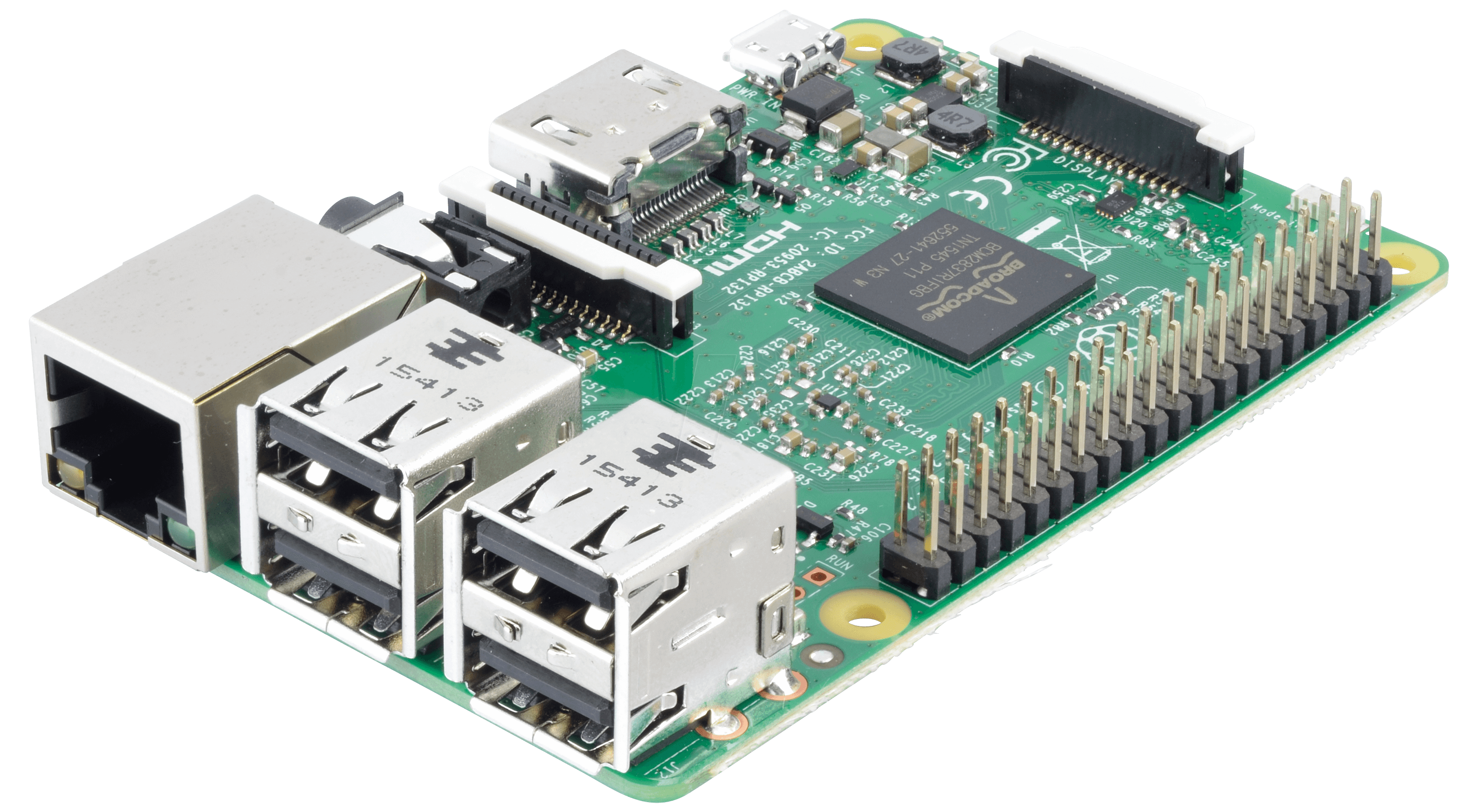
Zur Realisierung des Projekts wird ein Raspberry Pi (Mikrokontroller) verwendet.
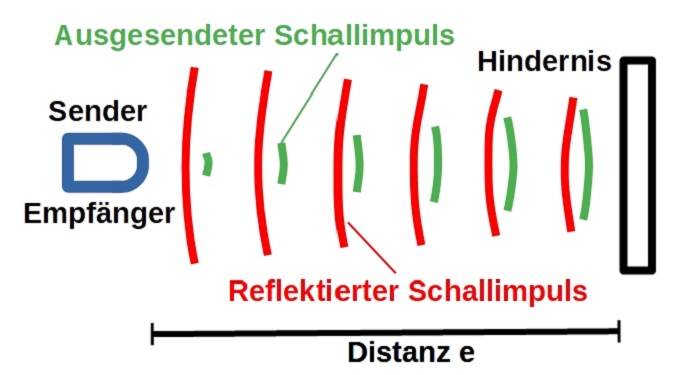
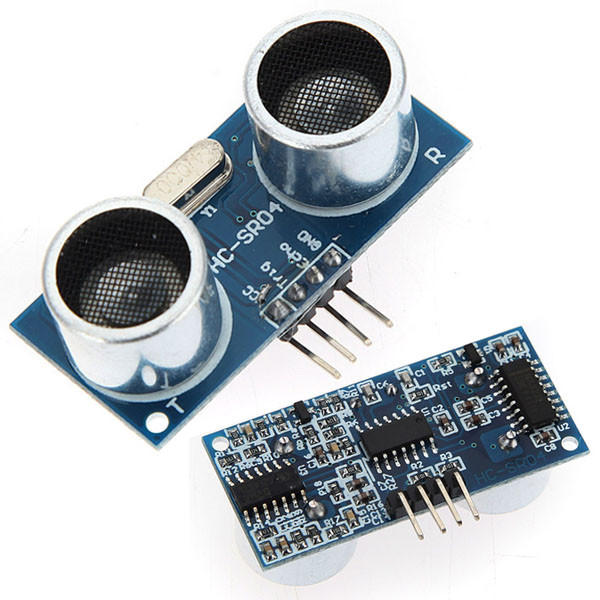
Der Ultraschallsensor dient zur Entfernungsmessung. Sobald eine fallende Flanke an dem Pin des Sensors erkannt wird, startet dieser eine Zeitmessung. Das Ultraschallsignal wird an dem Objekt, zu welchen die Distanz gemessen wird, reflektiert und wird am Echo-Pin des Sensors detektiert. Mit Hilfe der Schallgeschwindigkeit kann, man aufgrund der gemessenen Zeit, auf die Entfernung rückrechnen.
Aufgenommen wird das Video, welches das Softwareteam weiterverarbeitet, mit dem Kameramodul des Herstellers Raspberry Pi.
Alle Komponenten der Hardware finden sich in einem Gehäuse wieder und diese wird auf einem Kamerastativ befestigt.
In diesem Kapitel werden die Schritte des Softwareteams dokumentiert. Die einzelnen Schritte werden nur grob wiedergegeben.
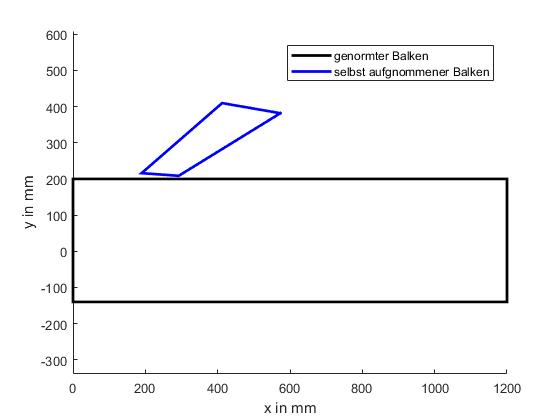
Das erste Bild ist ein Frame vom selbst aufgenommenen Video. Dieses wird mittels einer selbstgeschriebenen Funktion ermittelt. Jeder Frame des Videos wird abgespeichert. Im nächsten Bild ist der Vergleich des optimalen Balkens(schwarz) und den tatsächlichen Balken(blau) dargestellt. Daran kann erkannt werden, wie verzerrt das aufgenommen Bild ist.
Für die Transformation wurde angenommen, dass ein Pixel gleich 1 mm ist. Mit Hilfe einer geometrischen Transformation kann dieser "entzerrt" dargestellt werden und gleicht nun den optimalen Absprungbalken. Das transfomierte Bild ist nun genormt.
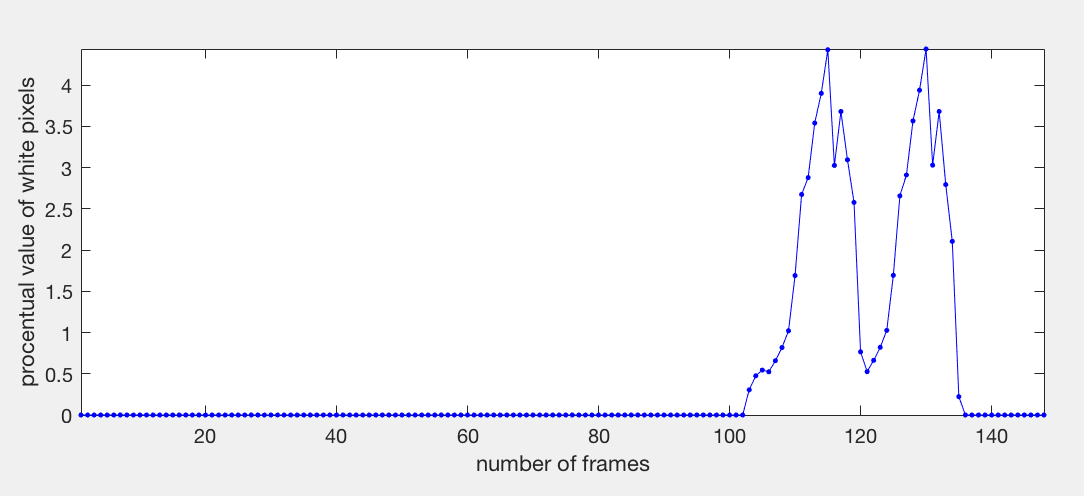
Nun wird der Fuß erkannt, um die Distanz zu ermitteln. Um dies realisieren zu können muss der transformierte Balken als Referenzbild angenommen werden. Das Histogramm zeigt, den prozentuellen Anteil der weißen Pixel in jedem einzelnen Binärbild \Frame. Der zweite Anstieg des Graphens stellt das Phantomobjekt dar. Es führt zu keiner Verfälschung, da beide Objekte ident sind und somit ihre Distanz.
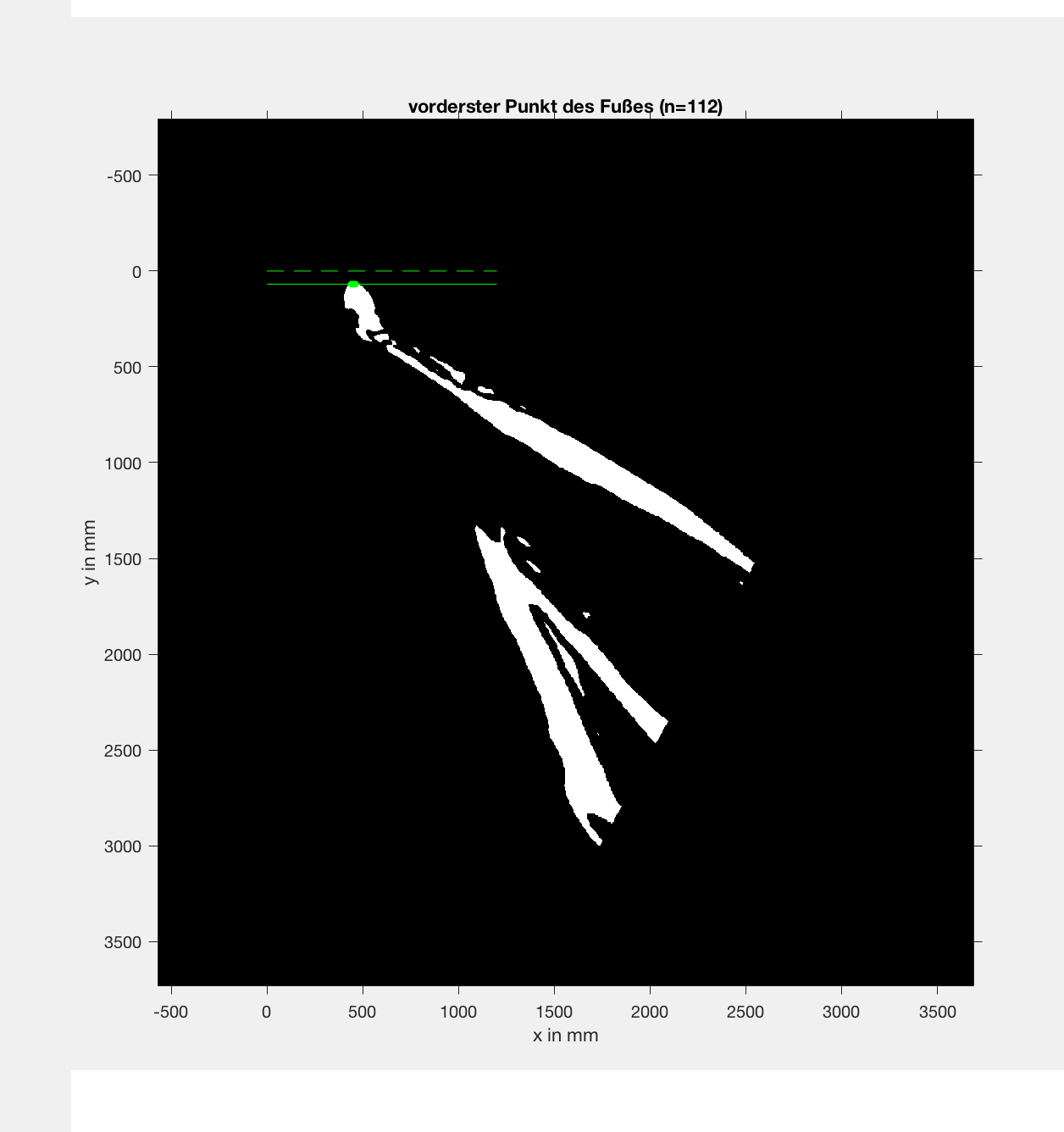
Dieses Bild wird weiterverarbeitet, damit nur der Fuß ersichtlich ist. Mit Hilfe des erkannten Fußes kann die Distanz ermittelt werden, siehe nächste Abbildung.
In der letzten Abbildung wird der Ruhepunkt im transformierten B
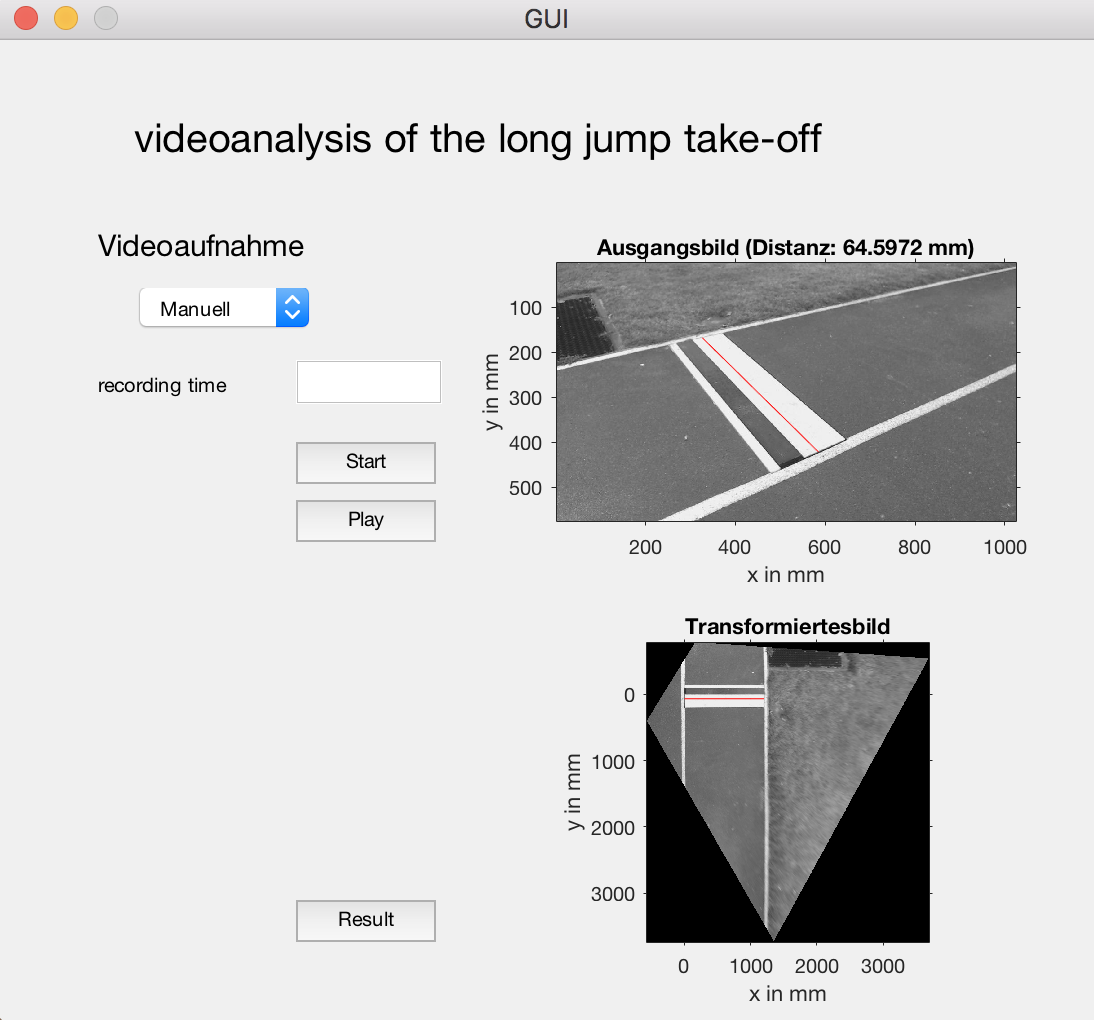
ild und im aufgenommenen Bild eingezeichnet. Um den Ruhepunkt im aufgenommen Bild einzeichnen zu können, muss eine Inverse Transformation durchgeführt werden. Der Ruhepunkt im transformierten Bild kann einfach so eingezeichnet werden, weil dieser in transfomierten Bild ermittelt wurde. Die Distanz des ist in diesem Fall: 64.556 mm.

Email: Julia.Sifrar@htl-klu.at

Email: Alina.Mayer@htl-klu.at

Email: Celina.Klausner@htl-klu.at