Julian Silan
Regelungssystem Softwareentwicklung, Patent
julian.silan@htl-klu.at
Deutsche Version
Der österreichische Tourenskisport hat sich mit 500.000 bis 700.000 Tourenskigehern zum Breitensport entwickelt (Quelle: SKIMO Austria). Ein ständiges Problem dieser Sportart stellt die Steighilfe dar, weil sie je nach Hangneigung händisch verstellt werden muss. Dadurch wird der Aufstiegsrythmus unterbrochen, was wiederum einigen Sportlern Komplikationen bereitet. Der derzeitige Wintersportmarkt verfügt über keinen Anbieter, der eine automatische Niveuregulierung der Tourenskiern produziert. Die aktuell produzierten Tourenski-Bindungen müssen per Hand oder mit Skistöcken, je nach Hangneigung verstellt werden. Im Zuge dieses Projektes soll das Steighilfesysteme der Tourenski dahingehend erneuert werden, dass die Steighilfe (Niveauregulierung) automatisch vom Reglersystem verstellt werden soll. Die Berechnungen der Niveauregulierung werden von einem Microcontroller vorgenommen. Die Lageerfassung erfolgt mit Hilfe von Sensoren, was wiederum die Verstellung des Schrittmotors hervorruft. Die gesamte Niveauregulierung ist zwischen den Tourenski-Bindungen montiert. Zusätzlich wurde bereits ein Patent auf dieses neuentwickelte System beantragt (Anmeldenummer: A 333/2018).
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English Version
With 500,000 to 700,000 alpine-touring skiers, the Austrian alpine-touring skiing sport has developed into a popular sport (source: SKIMO Austria). A constant problem of this sport is the climbing aid system, because it has to be adjusted manually depending on the gradient of the slope. This interrupts the ascent rhythm, which causes complications for some athletes. The current winter sport market does not have a supplier that produces an automatic level regulation for alpine-touring-skis. The currently produced alpine-touring-ski bindings must be adjusted by hand or with ski poles, depending on the he gradient of the slope. In the course of this project, the alpine-touring-ski climbing aid system should be replaced, so that the alpine-touring-ski climbing aid system (level control) will be adjusted automatically by the control system. The calculations of the level control are carried out by a microcontroller. The position is detected by attitude sensors, which in turn causes the stepper motor to move. The entire automatically level regulation is mounted between the alpine-touring-ski bindings. In addition, a patent has already been applied for this newly developed system (application number: A 333/2018).
Unser Logo
![]()
The Promotional Video
Das Projektteam hat sich überlegt ein Werbevideo bzw. Erklärvideo zu erstellen um Personen oder auch potentielle Investoren, welche das Produkt SKYSTEPS nicht kennen, die Idee, die Funktion und auch die Lösung näher zu bringen.
Hier erhalten Sie einen Einblick in die einzelnen Arbeitsbereiche des Projekts.
Genau dies wird momentan vom österreichischen Patentamt geprüft.
Die Dauer einer Nachforschung beträgt im Schnitt zwischen 6 bis 8 Monate.
Der erste Schritt im Themenbereich Patent war die Durchführung einer Patentrecherche.
Bei der selbstdurchgeführten Patentrecherche kamen wir auf das Ergebnis, dass unsere Idee noch nicht erfunden bzw. patentiert wurde.
Für eine mögliche Realisierung der Patenteinreichung wurde Dr. rer. nat. Daniel Alge als Patentanwalt herangezogen.
Um ein Patent anmelden zu können, wurden von uns die dafür vorgesehenen Dokumente ausgefüllt und mit der Ideenbeschreibung
an das österreichische Patentamt in Wien gesendet.
In der Ideenbeschreibung wurden folgende Punkte beschrieben:
1. Allgemein
2. Entwickler
3. Stand der Technik
4. Technische Anforderung der Erfindung – Lösung
5. Komponenten der Erfindung
6. Aufgabe der Komponenten
7. Vorgangsbeschreibung
Mitte November 2018 teilte Dr. Daniel Alge uns die Anmeldenummer A 333/2018 mit.
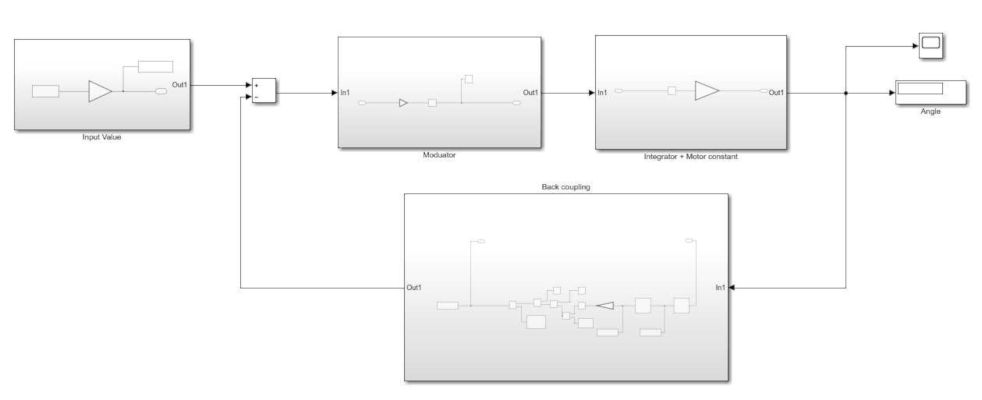
Das Regelmodell besteht aus vier Teilsysteme. Das erste Teilsystem beschäftigt sich mit dem Eingangswert. Der Eingangswert, die Motorschrittanzahl, wird mittels eines konstanten Parameters in eine Umdrehung umgewandelt. Das zweite Teilsystem stellt den Regler dar. Der Regler setzt sich aus einer konstanten Verstärkung und einer Limitierung zusammen. Die Limitierung wird benötigt, um die maximal auftretende Drehzahl des Motors zu begrenzen. Das dritte Teilsystem simuliert den Motor. Der Motor wird mittels eines Integrators und einer Motorkonstante simuliert. Der Integrator wandelt eine Umdrehung in eine Drehzahl um, währenddessen die Motorkonstante die Drehzahl in einen Winkel umrechnet. Der simulierte Winkel wird an dem Display veranschaulicht. Das vierte und letzte Teilsystem ist die Rückkopplung. Die Rückkopplung besteht aus zwei Teilen. Der erste Teil simuliert den Lagesensor anhand einer „look-up table“. Der zweite Teil der Rückkopplung ist die Umrechnung des Lagesensorwerts in eine Umdrehung.
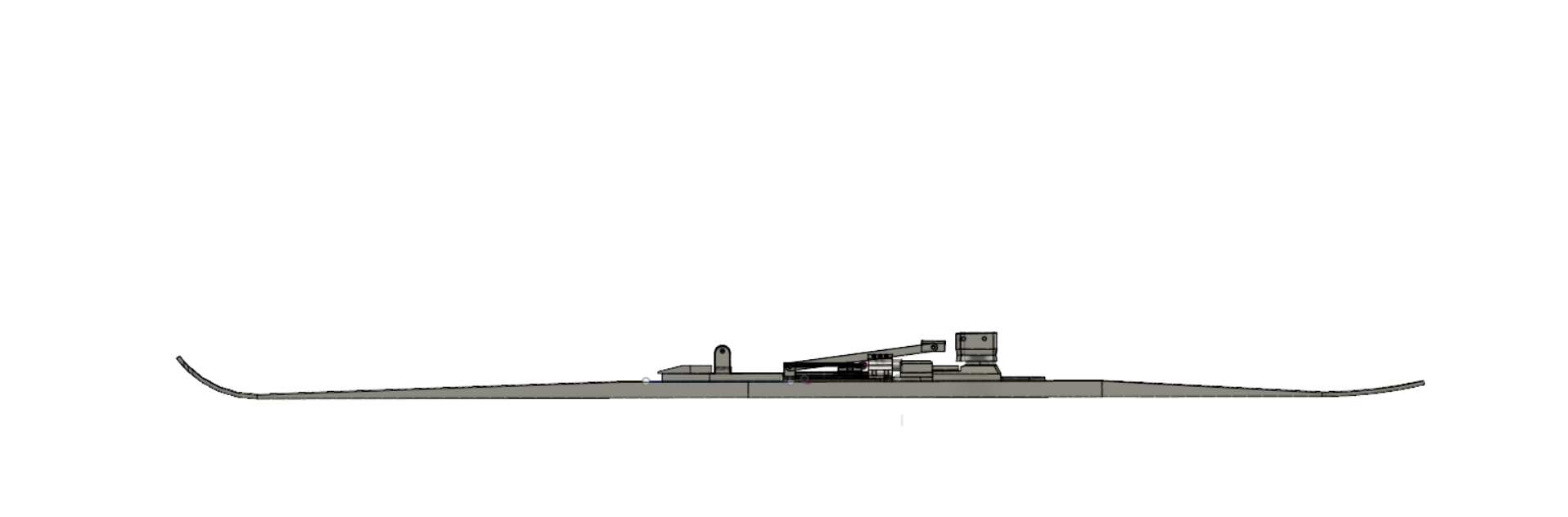
Der Hardwareaufbau besteht aus einer Grundplatte, worauf die entwickelten Hardwarekomponenten montiert wurden.
Es wurden drei Hardwarekomponenten entwickelt, die Niveauregulierung, die Technikbox und der Hangneigungssimulator.
Folgende Komponenten wurden am Prototyp verbaut:
1. Schrittmotor
2. Schrittmotortreiber
3. Lagesensor
4. Mikrocontroller
5. Reedkontakte
6. Führungsschiene
7. Führung
8. Akkumulator
Die Technikbox wurde speziell konstruiert, um die sensiblen Hardwarekomponenten vor den äußeren Gegebenheiten zu schützen.
Des Weiteren befindet sich an der Niveauregulierung der Schrittmotor, die Führungsschiene und die Führung.
Der Hangneigungssimulator dient dazu die Hangneigung mit Hilfe des Lagesensors zu simulieren.
Mit Hilfe von Fusion 360 wird die Automatische Tourenski Niveauregulierung konstruiert, ständig verbessert und weiterentwickelt.
Die nebenstehende Abbildung entspricht dem Prototyp V3.

julian.silan@htl-klu.at

julia.hoffmann@htl-klu.at

christian.taxacher@htl-klu.at

heinz.untersteiner@htl-klu.at

bernhard.wurnitsch@htl-klu.at