Bianca Grottenegg
Hinderniserkennung
Software und Hardware
E-Mail:
bianca.grottenegg@htl-klu.at
Deutsch
Die Idee ist es, eine elektronische Hinderniserkennung zu entwickeln und den gewohnten Blindenstock zu ersetzen.
Das System wird am Schienbein befestigt und enthält zwei Entfernungssensoren zum Messen der Entfernung zum Boden bzw. zum Hindernis und einen Lagesensor, um die Neigung des Unterschenkels zu ermitteln.
Die Datenverarbeitung erfolgt mit einem Mikrocontroller.
Die zwei Entfernungssensoren sind übereinander in einem definierten Abstand positioniert. Über die Differenz der gemessenen Abstände und der Lage des Unterschenkels kann entschieden werden, ob sich ein Hindernis im Erfassungsbereich befindet.
Die Daten werden über eine
Bluetooth Verbindung an einen zweiten Mikrocontroller übermittelt und erkannte Hindernisse als Vibrationen, deren Intensität proportional zur
Entfernung ist, am Handgelenk ausgegeben.
Sehbeeinträchtigte Menschen müssen keinen Blindenstock mehr verwenden. Da das System am
Schienbein befestigt wird, sind die Hände der Person frei. Die bodennahen Hindernisse werden aufgrund der Form automatisch erkannt.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English
The idea was to realise a electronic obstacle detection to replace the common blindman's stick.
The system is located on the shin and concludes two distance sensors to measure the distance to the floor or rather
to
the obstancle and also a position transducer, to determine the grade of the lower leg.
The two distance sensors are positioned one upon the other in a certain distance.
Via the difference of the measured space and also via the grade of the lower leg can be determined if there is an onstacle.
The data will be transfered via a bluetooth connection to the second microcontroller and realised obstacles will be expensed as a vibration on the wrist. Such intensity is proportional to the distance.
Visual handicapped people have not to use the blindman's stick anymore. One big advantage is that the hands of the target subject are free. The obstacles near the floor will be recognised automatically cause of the form.
Da wir uns in den ersten Jahren viel mit der Anatomie des Menschen und auch mit den Erkrankungen, wie unter anderem des Sehsinns, beschäftigt haben, hielten wir es für eine gute Idee die elektronische Hinderniserkennung anzufertigen. Bei diesem Projekt dürfen wir nicht nur unsere fachlichen Kompetenzen anwenden, sondern auch unsere Zivilcourage. Denn wir helfen den sehbeeinträchtigten Menschen DAS SEHEN ZU FÜHLEN und verschließen nicht unsere Augen.
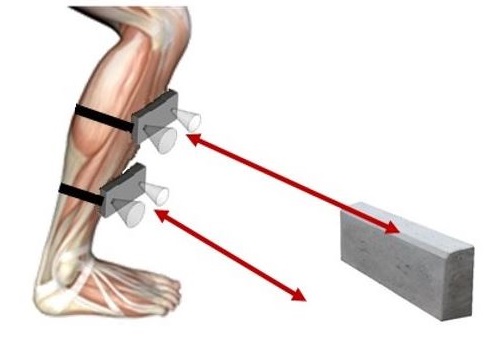
Zwei Entfernungssensoren sind übereinander in einem definierten Abstand positioniert. Über die Differenz der gemessenen Abstände und der Lage des Unterschenkels kann entschieden werden, ob sich ein Hindernis im Erfassungsbereich befindet.
Die Bluetooth- Verbindung fungiert als Datenübertragung von dem ESP32 auf dem Fuß zum ESP32 auf der Hand. Implementiert wird dafür ein Server, welcher sich auf dem Handgelenk befindet und ein Client auf dem Schienbein. Der Client sendet die Werte für den Motor und der Server empfängt diese.
Der Motor, der im Einsatz ist, ist ein Vibrationsmotor und mit einem 8 bit DAC Pin des ESP32 verbunden. Die Werte, welche der Server empfängt, sind analoge Werte (0,85,170 und 255), welche umso höher sind, umso näher das Hindernis kommt. In einem Abstand von 0m - 0.5m vor dem Hindernis vibriert der Motor am stärksten, von 0.5m - 1m folgt eine mittlere Vibrationsstärke und eine leichte Vibration in einem Abstand von 1m bis 1.5m.







Hinderniserkennung
Software und Hardware
E-Mail:
bianca.grottenegg@htl-klu.at

Erstbetreuer
Professor an der HTL Mössingerstraße
E-Mail:
thomas.benetik@htl-klu.at

Benutzerinteraktion und Lageerkennung
Software und Hardware
email: anna.riegler@htl-klu.at