In Zeiten des modernen Automobilverkehrs gewinnen Assistenzsysteme und dadurch
auch autonomes Fahren immer mehr an Bedeutung, weshalb sich unser Projekt mit
eben diesem Thema befasst. Nicht nur im Straßenverkehr, sondern auch besonders zu
industriellen Zwecken werden vermehrt autonome Systeme eingesetzt, beispielsweise
um Werkzeuge, Pakete oder andere Gegenstände selbstsändig zu gewählten Zielen zu
transportieren.
Autonome Assistenzsysteme, im persönlichen Umfeld, sind noch nicht etabliert, etwa
um beeinträchtigte Personen im Alltag zu unterstützen. Vor allem in diesem und
ähnlichen Bereichen soll unser Projekt erstmals eine Hilfestellung schaffen, um
Menschen täglich zu begleiten.
Was ist "Lucy"
What is "Lucy"
"Lucy" ist ein autonomes Fahrzeug, welches selbstständig zu einem gewählten Ziel
fahren kann. Wenn auf einer Karte ein Ziel gewählt wird, muss dieses Gebiet
lediglich zuvor digital erfasst werden. Die Erfassung geschieht zusätzlich simultan
beim Durchqueren von Räumen oder Gebäuden. Dies wird unter anderem mithilfe eines
LiDAR (Light Detection and Ranging) Sensors erreicht. Das Fahrzeug bewegt sich
daraufhin automatisch zur Destination, ohne dabei mit statischen oder beweglichen
Objekten zu kollidieren.
"Lucy" is an autonomous vehicle, which can navigate to a chosen destination
independently. In order to choose a target on a map, the designated area needs to be
digitally mapped first. The mapping process happens simultaneously while traversing
rooms or buildings. This is done by means of a LiDAR (Light Detection and Ranging)
Sensor. The vehicle then moves to its destination autonomously, without crashing
into static or moving objects.
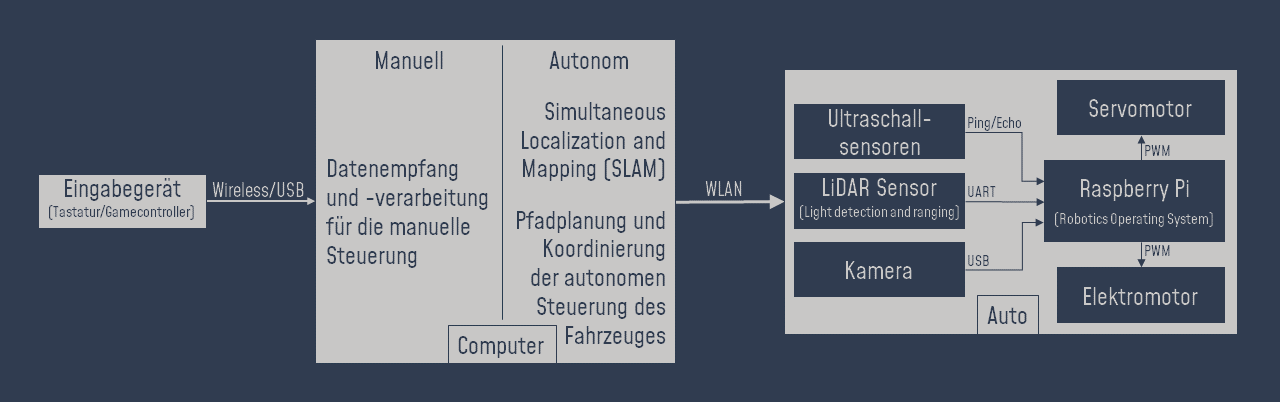
Systemstruktur
Um dies zu realisieren befindet sich am Fahrzeug der mobile
Computer "Raspberry Pi", welcher mit dem (speziell für Roboter entwickelten)
Betriebssystem "ROS" (Robotics Operating System) ausgestattet ist. Die Zieleingabe
kann über einfache und bekannte Wege (grafische Benutzeroberfläche) erfolgen.
Innovation
Die Innovation unseres Projektes kennzeichnet sich vor allem durch die Verwendung
von besonderen Sensoren, um Räume zweidimensional besser zu erfassen und
anschließend autonomes Fahren zu ermöglichen. Ähnliche Projekte können oft nur
vordefinierten Linien folgen oder verwenden für selbständige Fahrfunktionen meist
nur Ultraschallsensoren und eventuell auch Kameras. Unsere Herangehensweise
beinhaltet jedoch genauere und zuverlässigere Sensoren. Es werden die Daten
mehrerer Sensoren berücksichtigt, um ein optimales Ergebnis zu erreichen.
Projektteam
Yannik Rauter
Entwicklung von Assistenzsystemen für manuelles und autonomes Fahren
Prof. Dipl.-Ing. Dr. techn.
Daniel Wischounig-Strucl
Projektbetreuer
Felix Holz
Implementation von autonomen Fahrfunktionen
Nutzen
Die HTL-Mössingerstraße kann unser Projekt zukünftig nicht nur als Paradebeispiel
für autonomes Fahren an besonderen Schulveranstaltungen vorzeigen, sondern Lehrer
könnten zusätzlich erforderte Unterrichtsmittel (zum Beispiel für den Werkstätten-
oder Laborunterricht) einfacher oder eben sogar selbständig zu den benötigten
Räumen transportieren.
Unser zukünftiger Projektpartner wird unser Projekt zu vielen verschiedenen
Zwecken einsetzen können.Als Haupteinsatzgebiet ist der Transport beziehungsweise
die Lieferung von Materialien, Werkzeugen, Lebensmittel oder anderen Objekten
innerhalb von Gebäuden vorgesehen. Durch zusätzliche Weiterentwicklung könnte
unser Projekt jedoch sogar zu einem selbstständigen Einkaufswagen werden.