Bernt Ekkehart Lass
führt das Projekt aus
Deutsch Hauptziel meines Projektes cadMUR ist, mich mit den wichtigsten Vorgängen rund um das Prinzip eines Drei-Achsen-Roboters vertraut zu machen.
Im Zuge dessen soll zum besseren Verständnis nach Möglichkeit auch ein eigener Roboter dieser Art geplant und aufgebaut werden, mit dem es möglich sein soll, diverse Werkzeuge im 3D-Raum zu bewegen und zum Einsatz zu bringen. Die Arbeitsfläche sollte dabei etwa 1000mm x 1300mm betragen
Professionelle Drei-Achsen-Roboter, die speziell dem CNC-geführten Plasmaschneiden von Stahl dienen, kosten im Handel selten unter 35.000,- €, gerne aber auch das Doppelte und mehr.
Da mir solch ein Budget für diesen Zweck derzeit nicht zur Verfügung steht, ergibt sich die Notwendigkeit, einen Weg zu finden, mit dem der mechanische Aufbau sehr viel günstiger gestaltet werden kann.
Vielleicht machen meine Ideen anderen Leuten Mut, sich eventuell selbst ein ähnliches Gerät zu bauen.
Das Projekt cadMUR ist als Abschlussprojekt der HTL Mössingerstraße ausgelegt, soll aber danach weiter ausgebaut werden.
cadMUR wird ohne Firmenbeteilung oder Wirtschaftspartner privat von mir finanziert. An dieser Stelle möchete ich meinen ausdrücklichen Dank an jene Leute aussprechen, ohne die das Projekt so nicht möglich gewesen wäre:
Helmut Wutte, Margret Sprengart, Volker Borovsky, Roland Kitz, Peter Mulac, meine Söhne Wolf und Gebhart und natürlich in jeder erdenklichen Weise meine Frau Doris.
Über den weiteren Fortschritt des Projektes cadMUR erfahren Sie in Folge auf www.mcu.at
English The objective of the project cadMUR is to make myself familiar with the most important processes around a three-axis robot.
In the course of this and for the better understanding, I would like to plan and built a robot of this kind. With that it should be possible to move and deploy various power tools in 3D space.
Another project goal is to find a way to realise the mechanical structure in a way, that the construction of a 3-axis robot becomes available even for a low budget.
Wenn mechanische Bauteile gefertigt werden sollen, so ist es in den meisten Fällen notwendig oder ratsam, dafür entsprechende
Konstruktionszeichnungen anzufertigen.
Es gibt heutzutage ein breitgefächtertes Angebot an Computer-Anwendungen, mit denen diese Zeichnungen am Computer gefertigt werden können.
Programme dieser Art werden CAD-Software genannt. Die Bezeichnung CAD stammt vom englischen "computer-aided design" und bedeutet
"rechnerunterstütztes Konstruieren".
Mit speziellen Algorithmen können die CAD-Dateien der - meist im dreidimensionalen Raum gezeichneten - Baukörper so umgerechnet werden, dass sie in Folge zur computergesteuerten Produktion von realen Bauteilen verwendet werden können. Das bedeutet, dass die Abmaße der vorerst nur zeichnerisch vorhandenen Bauteile in ein dreidimensionales Raumkoordinatensystems übergeführt werden, nach deren Ordnung dann die Bauteile von computergeführten Arbeitsmaschinen gefertigt oder nachbearbeitet werden können.
Dafür gibt es verschiedenste technische Möglichkeiten, von denen hier nur einige genannt werden können:All diesen Verfahren gemeinsam ist die computergesteuerte Führung der abtragenden Werkzeuge oder Materialzuführungen.
Ich habe mein Projekt "cadMUR" genannt. Dieser zugegeben sehr ambitionierte Name bedeutet, dass in CAD-Software gefertigte 2D- und 3D-Zeichnungen von Bauteilen mithilfe meines 3-Achsen-Roboters hergestellt werden sollen. Somit wäre der "CAD"-Teil des Namens erklärt.
Das "MUR" in "cadMUR" hingegen ist eine fast schon anmaßende Abkürzung für "multi-utility-robot" - zu dt.: "Roboter für viele verschiedene Anwendungen". Dies soll bedeuten, dass ich die mittels dreier unabhängiger Achsen gesteuerte Arbeitsplatte so ausführen möchte, dass eine Schnellaufnahme für ein einfaches Wechseln verschiedener Werkzeuge möglich sein wird.
In erster Linie soll dies das Schlauchpaket eines Plasmaschneiders sein, sodass Blechplatten bis zu einigen Millimetern Stärke computerführt geschnitten werden können, z.B. geometrische Formen wie Kreise, Rechtecke, aber auch Buchstaben, Schilder, Kunstgegenstände - eben all jenes, das in der CAD-Zeichnung vorbereitet wurde.
Auch eine Frässpindel, ein Lasercutter sowie eine Bohr- und Schleifspindel sollen mittels Wechselplatten an der Werkzeugwechsel-Aufnahme angebracht werden können.
In weiter Folge könnten mittels anderer Wechselaufnahmen auch ein MIG-Schlauchpaket oder der Extruder für 3D-Druck angebracht werden. Dies wird aber wohl erst später und vorerst eher nur zu Testzwecken ausgeführt werden.
Der hohe Preis professioneller Anlagen hat selbstverständlich Gründe, cadMUR hingegen ist als Lernprojekt und als "proof of concept" zu sehen, und kann und will daher weder technisch noch optisch mit professionellen Anlagen mithalten.
Noch einmal möchte ich dezidiert hervorheben, dass mein Hauptziel dieses Projekt ist, das Verstehen der technischen Zusammenhänge rund um 3-achsen-Roboter ist
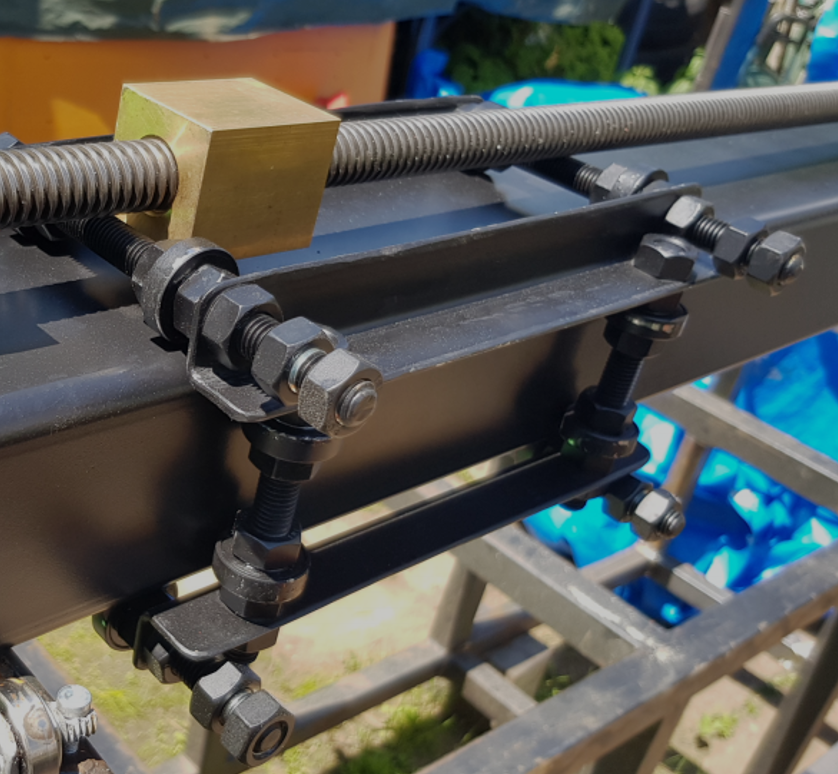
Der mechanische Aufbau wurde aus Kostengründe sehr einfach gewählt: Die Unterbau-Rahmen-Konstruktion wurde in Form von drei fix verschweisten Quadern mit 4-Kant-Stahlrohren aufgebaut. Für den Vorgang des Plasmaschneidens mehr als ausreichend stabil. Sollte für das Fräsen von Aluminium eine höhere Anforderung an Stabilität notwendig sein, kann mit Diagonalen schnell und einfach nachgebessert werden. Die Führungen wurden mithilfe von selbstgefertigten Kugellager-Führungen realisiert, die sehr gut einstellbar, die bezüglich Genauigkeit und Stabilität in ersten Tests völlig ausreichend sind.
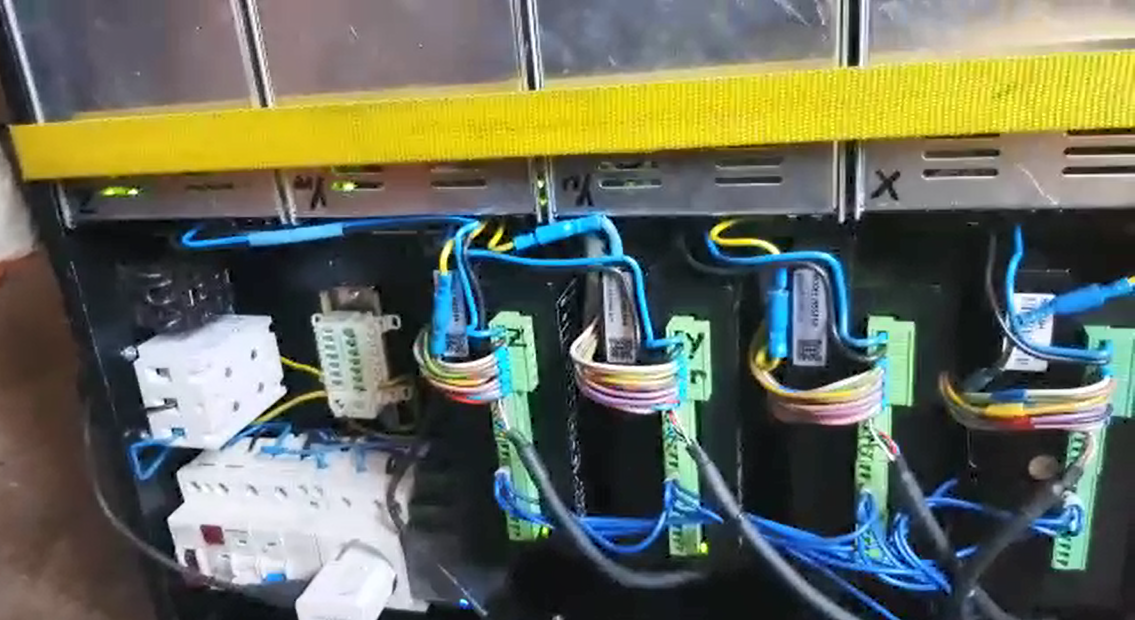
Die Schrittmotoren sind mit 9Nm und Nema34 mehr als überdimenioniert, mit dem Vorteil, Schrittverluste und Überlastung weitgehend auszuschließen. Die Netzteile sind mit 8,8A bei 60Volt, wie auch die Schrittmotortreiber bei der gleichen Firma (Act-Motors via Amazon) passend gekauft worden. Die Eding-CNC-Platine ist unter Software-Steuerung näher beschrieben.
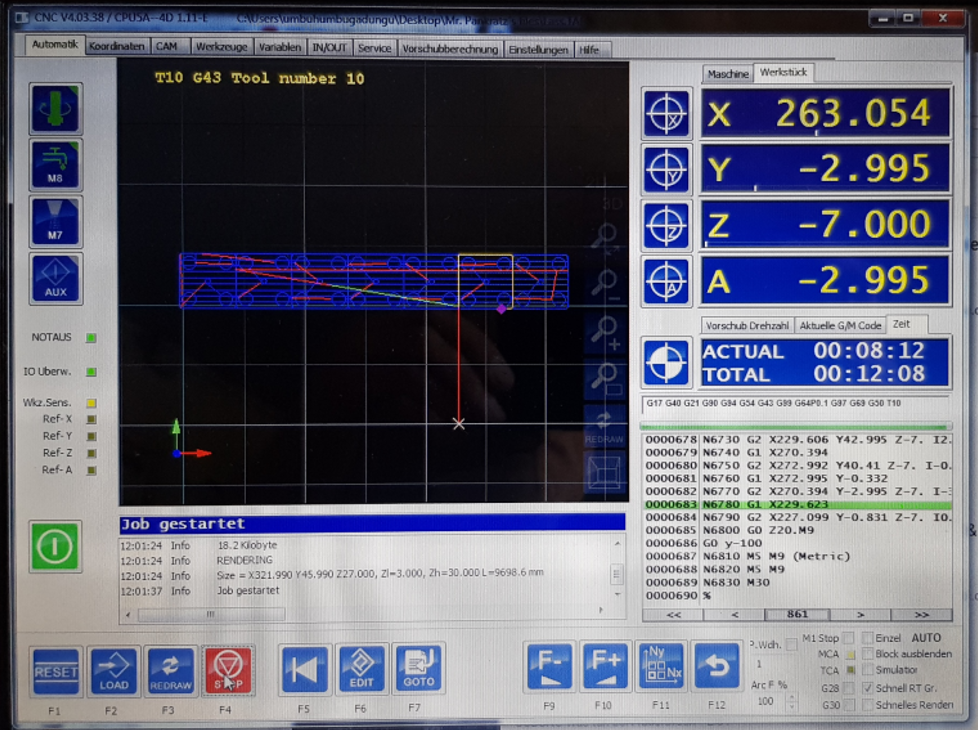
Für die Software-Steuerung wurde auf die professionelle Hardware-Software-Lösung der niederländischen Firma Eding-CNC B.V. von Alfred Bos zurückgegriffen. Das board "CPU5A4E 4 Achsen mit Ethernet" ist eine sehr hochwertige Lösung, die mehrere Vorteile bietet: Einerseits ist sie via Ethernet mit dem Computer verbunden - die derzeit zuverlässigste Lösung für CNC-boards. Andererseits können vier getrennten Achsen betrieben werden. Der größte Vorteil ist aber, dass sowohl das Board, als auch die Software (die beim Kauf bereits im Preis inkludiert ist), aus einer Hand kommen. Das bedeutet, dass jedes Software-Update unmittelbar auch in der Hardware berüchsichtig ist.