Willkommen
Herzlich willkommen auf unserer Projektseite. Auf dieser Homepage erhalten Sie Informationen rund um das Projekt Automated Golf Player.
Kurzbeschreibung
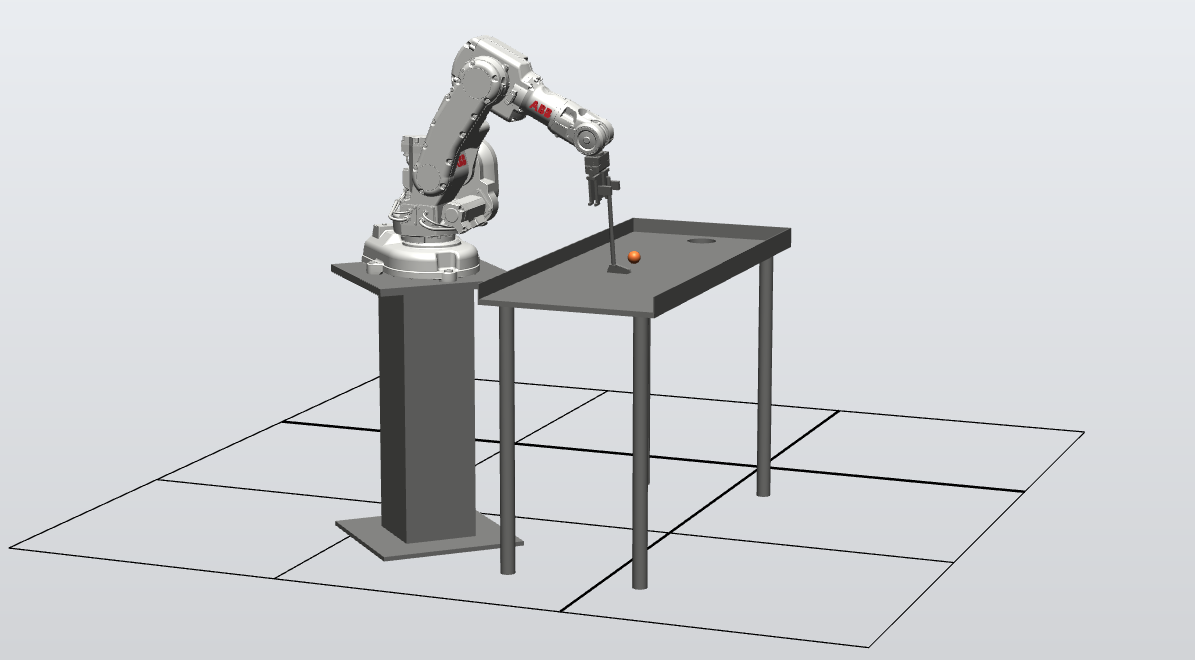
Deutsch Automated Golf Player soll angehenden Schülerinnen und Schülern, sowie angehenden Technikern und Technikerinnen die Vielfalt von Optionen und Möglichkeiten bei der Programmierung von Robotern näherbringen. Um dies zu realisieren wird ein Golfspiel mit dem Industrieroboter IRB 140 von ABB nachgestellt.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English Automated Golf player is designed for future students, as well as future technicians to show them the variety of options and possibilities when it comes to robot programming. In order to make this possible, the industrial robot IRB 140 from ABB is readjusted to play golf.