Maximilian Berthold
Projektleitung, Hardware
Quote
Deutsch Mithilfe unseres Projektes soll demonstriert werden, wie in der Zukunft autonomes Fahren aussehen könnte und welche Rolle die Objekterkennung für diese spielt. Läuft ein Kind auf die Straße braucht der Mensch im Durchschnitt mehr als 1,6 Sekunden um den Bremsvorgang einzuleiten. Autonome Fahrzeuge, die mit einem Kamerasystem und zusätzlichen Sensoren ausgestattet sind brauchen vergleichsweise maximal nur ein Drittel der Zeit. Wie funktionieren solche Kamerasysteme, beziehungsweise wie können Personen erkannt werden? So soll es mit unserem Projekt möglich sein, verschiedene Gesichter zu erkennen und anschließend visuell zu verfolgen. Die Kamera soll mit einem in allen Achsen beweglichen Servomotor ausgestattet werden. Dies dient dazu, dem Menschen die Idee des autonomen Fahrens und dessen Funktionsweise genauer zu erklären und visuell darzustellen. Bis dato gibt es noch kein vergleichbares Projekt, dass aufgrund der Strukturierung von Gesichtsumrissen den Menschen erkennt und ihn mithilfe dazugehöriger Servomotoren folgt.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English With the help of our project, we want to demonstrate what autonomous driving could look like in the future and what role the object detection for this plays. If a child runs onto the road, a person needs on average more than 1.6 seconds to initiate the braking procedure. Autonomous vehicles equipped with a camera system and additional sensors need comparatively only a third of the time at most. How do such camera systems work and how can people be recognized? Our project should make it possible to recognize different faces and then follow them visually. The system is equipped with a camera, which can move in all different directions. This serves to give people an idea of autonomous driving and to explain its functionality in more detail and to present it visually. To date, there is no comparable project that recognizes and depicts human beings by structuring facial contours with the aid of the corresponding servo motors.
Das Ziel dieser Diplomarbeit ist es, ein Kamerasystem zu entwickeln, welches Objekte erkennen und unterscheiden kann. Es soll nachvollziehbar auf mögliche Bewegungen der Objekte reagieren können.
Die Erkennung von menschlichen Gesichtsumrissen und deren Tracking, wird mithilfe folgender Komponenten realisiert:
-Hardware: PixyCam, PixyPanTilt, ArduinoUNO
-Software: MATLAB
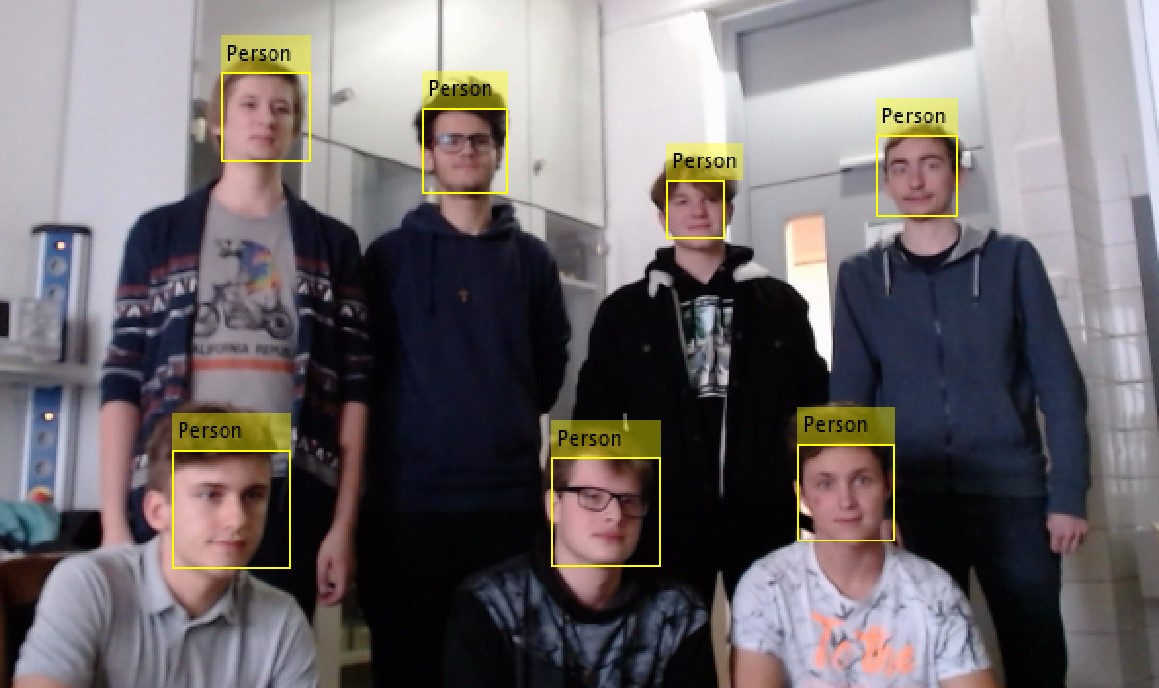
Das System erkennt die menschlichen Gesichter und kennzeichnet diese.
Wird ein Gesicht registriert und bewegt sich ausserhalb des Sichtfeldes der Kamera, adjustiert diese das Sichtfeld mithilfe zweier Servomotoren.
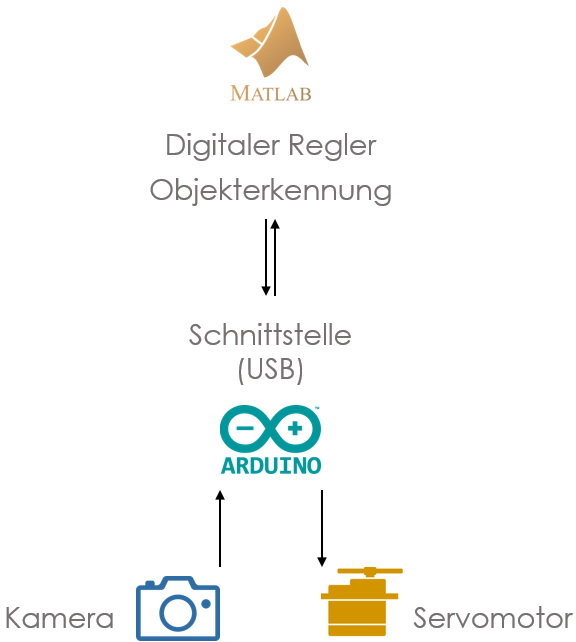
Folgende Abbildung beschreibt, wie die Komponenten miteinander verknüpft sind
-Kamera: Die Kamera übermittelt die Bildinformationen über den ArduinoUNO zu dem Programm Matlab
-ArduinoUNO: Tauscht die Daten zwischen der Kamera, den Servomotoren und MATLAB aus
-MATLAB: MATLAB dient als unser Digitaler Regler (Justierung der Servomotoren) und ist zudem für unsere Objekterkennung (Erkennung menschlicher Gesichter) zuständig
-Servomotoren: MATLAB reguliert die Stellung der Servomotoren je nachdem welche Informationen vorliegen. Das Ziel ist es das erkannte Objekt im Zentrum der Kamera zu fixieren

Quote

Quote

Quote