Daniel Franjic
Unterwasserantriebe
Start were you are. Use what you have. Do what you can.
Deutsch Drohnen erobern immer mehr Anwendungsgebiete in der heutigen Industrie. Grund dafür sind die vielseitigen Einsatzgebiete und die schnelle Anpassung von Drohnen. Unsere Aufgabe ist es eine Unterwasserdrohne in Solid Works zu konstruieren, die es ermöglicht eine Druckmessung bis zu 1 bar, sowie eine Tiefenmessung bis 5 Meter durchzuführen. Die Steuerung soll mithilfe eines Übertragungskabels, über eine Tastensteuerung, erfolgen. Des Weiteren ist eine Konstruktion, die die Messinstrumente, die Motoren und die Messinstrumente aufnimmt, zu designen. Die Projektleitung obliegt Herrn Daniel Franjic, er kontrolliert die durchgeführten Arbeiten und achtet dabei auf Sauberkeit. Seine Hauptaufgabe ist die Konstruktion des Unterwasserantriebs. Für den Aufbau der der Sensorik und den Zusammenbau aller Komponenten ist Mike - Andreas Schellander zuständig. Die Steuerung der einzelnen Motoren, sowie die gesamte Programmierung des Antriebes und der Steuereinheit obliegt Manuel Leitner. Die Aufgabe des Schriftführers wird von Herrn Dominik Walder übernommen. Zusätzlich ist er für Recherchearbeit und die Beschaffung eventuell zusätzlich benötigten Komponenten zuständig. Des Weiteren wird von ihm die Tiefenregelung übernommen.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Dieses Projekt wird gemeinsam mit einem Wirtschaftspartner durchgeführt:
 "
"
English Drones are conquering more and more areas of application in today's industry. The reason for this is the wide range of applications and the quick adaptation of drones.The Task is to construct a under water drone in Solid Works, furthermore enable a pressure measurement to 1 bar, also a depth measurement to 5 meters perform. The control is connected to a transmission cable, over key control. Furthermore, a design that accommodates the measuring instruments, the motors and the measuring instruments has to be designed. The project management is the responsibility of Mr. Daniel Franjic, he checks if the work carried out and pays attention to the work ethic. His main task although is the construction of the underwater drive. Mike - Andreas Schellander is responsible for the assembly of the sensors and the assembly of all components. Manuel Leitner is responsible for the control of the individual motors as well as the entire programming of the drive and the control unit. The job of secretary is taken over by Mr. Dominik Walder. In addition, he is responsible for research work and the procurement of any additional components that may be required. He also takes over the depth control.
Hier wird das Projekt möglichst anschaulich dargestellt - d.h. mit Bildern und den entsprechenden Erklärungen.
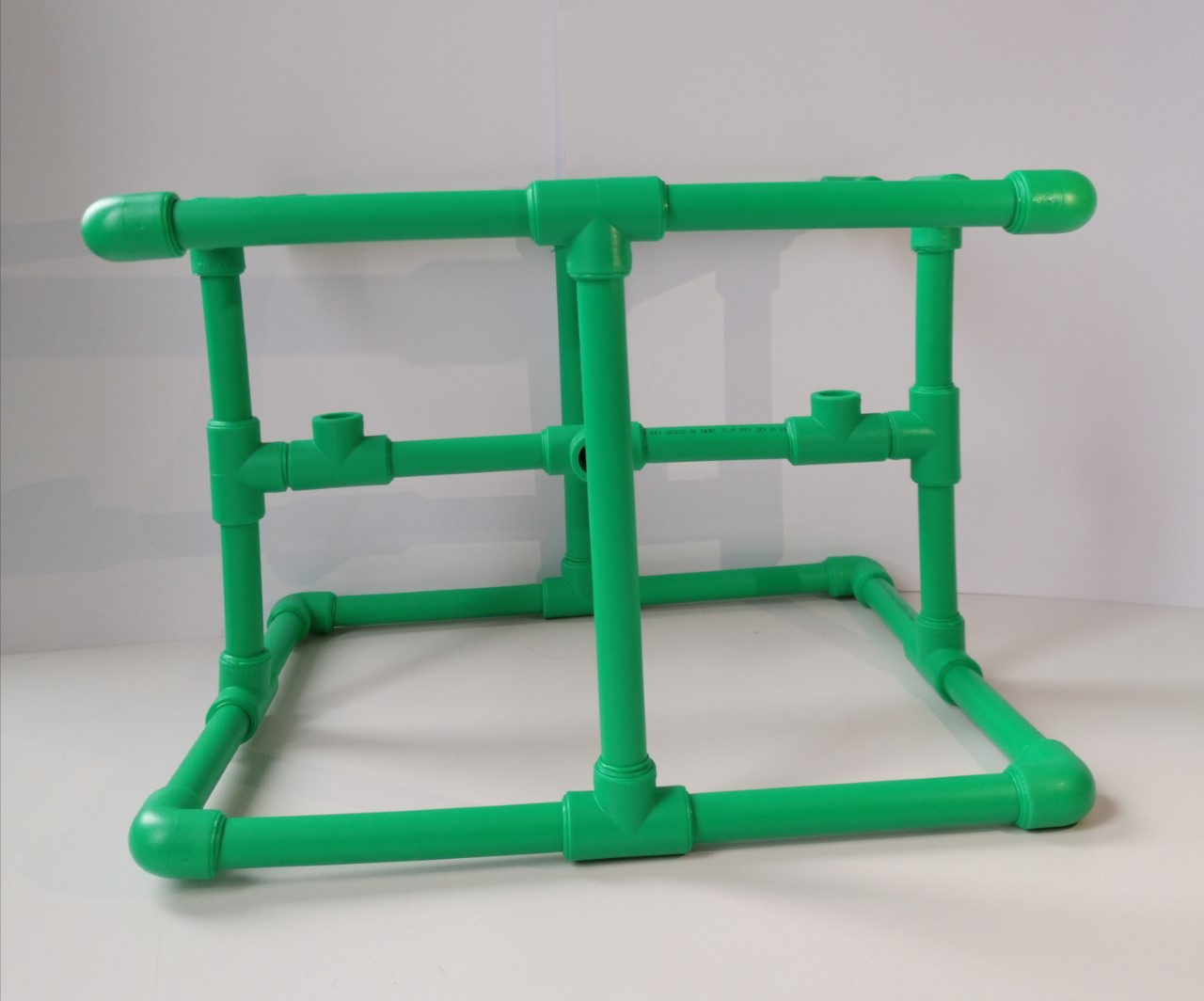
Hier erkennen sie den fertig erstellten Rahmen der Drohne. Der Rahmen wurde in Solid Works gezeichnet und nach Nachmessung der Parameter in mit PVC-Rohren zusammengeschweißt.
Der Arduino übernimmt das einscannen der Werte der Sensorik und gibt diese auf den Laptop bzw. PC aus. Dies ist möglich über einen sogenannten CAN-Bus. Dieser wird auf dem Arduino aufgesteckt und von einem soganannten Master an den Slave geschickt.

Start were you are. Use what you have. Do what you can.
You can´t use up creativity. The more you use, the more you have.
Creativity is contageous, pass it on.
You can mimic a result, but not the creativity.
