Willkommen
Herzlich willkommen auf unserer Projektseite Auf dieser Homepage erhalten Sie Informationen rund um das Projekt Trainingsstativ.
Kurzbeschreibung
Für die Analyse des Lauftrainings ist das Filmen des Sportlers auf der gesamten Laufbahn notwendig.
Normalerweise wird dafür eine zweite Person benötigt, was zusätzlichen organisatorischen Aufwand bedeutet.
Durch das sich automatisch auf den Läufer ausrichtende Trainingsstativ soll das kein Problem mehr darstellen
und der Läufer soll die Möglichkeit bekommen, sich selbst beim Laufen zu filmen.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Aufgabenstellung
Sport gewinnt heutzutage immer mehr an Bedeutung, sowohl bei der jüngeren als auch bei der älteren Generation.
Aus diesem Grund entstehen in diesem Bereich neue Ideen, wie zum Beispiel das Trainingsstativ. Das Ziel ist es,
einen Stativkopf zu entwickeln, der auf ein herkömmliches Kamerastativ geschraubt wird und durch eine Drehbarkeit
von 360° mithilfe von GPS-Positionierung den sich bewegenden Sportler verfolgt. Zum Filmen können individuelle
Kameras oder auch Handys verwendet werden.
Realisierung
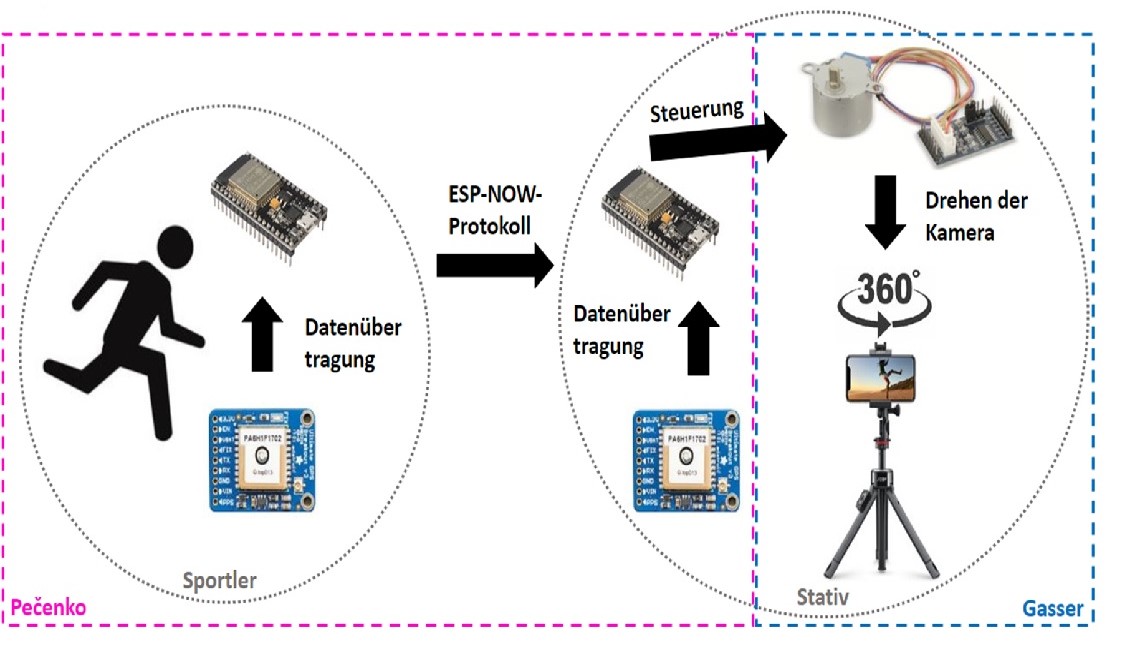
Das Projekt lässt sich in zwei Teile gliedern. Der Softwareteil der Diplomarbeit fokussiert sich auf die Verbindung
zwischen zwei Kontrollern, die über jeweils ein eigenes GPS-Modul ihre Position bestimmen. Eines davon ist am Stativ
befestigt und das andere wird vom Sportler getragen. Entsprechend der GPS-Koordinaten wird ein Motor angesteuert, der
die Kamerahalterung zum Sportler hin ausrichtet. Der Stativkopf mit zusätzlicher Handyhalterung wird 3D-gedruckt und
darin werden die Bauteile befestigt. Zudem werden die Bauteile des Läufers in einem separaten Gehäuse in einer Bauchtasche
transportiert. Man hätte das Projekt auch durch Anwendung von Bildverarbeitung lösen können, aber es wurde sich für die
GPS-Variante entschieden, da diese eine größere Herausforderung darstellte.
Ergebnis
Das Ergebnis besteht aus dem Stativkopf und dem Gehäuse für den Läufer. Der Stativkopf wird auf ein Stativ geschraubt,
darauf wird mit einer separaten Schraube eine Kamera bzw. eine Handyhalterung angebracht. Am Stativkopf befinden sich
außerdem Bedienelemente sowie eine RGB-LED. Die einzelnen Hardwaremodule werden mithilfe von Powerbanks betrieben. Die
Software setzt die Kommunikation zwischen den beiden Kontrollern um und steuert mittels Schrittmotor entsprechend der
GPS-Daten die Drehbewegungen des Stativkopfs.

Unser Team


Dipl.-Ing. Alexander Rodiga
Betreuer