Denis Sisic
Gehäuse- und Halterungsherstellung, Kommunikationsherstellung
E-Mail: denis.sisic@htl-klu.at

Deutsch Die invasive Blutdruckmessung wird bei kritisch kranken oder schwerverletzten Patienten für das kontinuierliche Monitoring verwendet. Allerdings kommt es während Operationen vor, dass der Transducer das Referenzniveau verlässt, wodurch ein veränderter Blutdruck dargestellt wird. Deshalb soll bei diesen Änderungen ein akustisches, sowie ein visuelles Warnsignal ausgesendet werden. Das Ziel des Projektes ist es, das Personal mithilfe eines akustischen- und visuellen Alarmes auf das Verlassen des Transducers aus seiner Referenzposition hinzuweisen. Die ausgehenden Signale sollen vom eingebauten Microcontroller empfangen, und von der Software verarbeitet werden. Dadurch soll ein Signal an die Hardware ausgesendet werden, welches zur Aktivierung diverser Funktionen führt.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English The invasive blood pressure measurment is used to continuously monitor critically ill, or badly wounded patients. Durnig the surgery, it sometimes occurs, that the transducer leaves its reference height, which causes the blood pressure to be displayed wrong. Because of that, the system should send out an audio signal and a visula signal. The goal of the project is to alert the surgery personell with a visual and audio signal that the transducer left its position. The outgoing signals are suppost to be sent to the intigrated microcontroller and processed by the custom software. Through this process a signal is sent to the hardware, which causes the alarm to be activated.
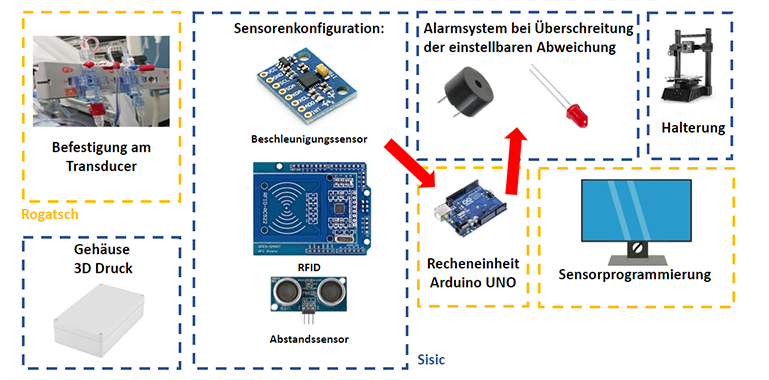
Hier wird die Systemstruktur und der Systemstrukturplan vorgestellt und erklärt. Ausserdem
wird die verwendete Hardware gezeigt
und die verschiedenen Sensoren vergestellt und ihr Anwendungsprinzip
gezeigt.
Diese beinhalten:
- Ultraschallsensor
- 3 Achsen Beschleunigungssensor
- RFID - System
Das Projekt besteht grundsätzlich aus 3 großen Bereichen:
- Hardwarekommuniation
- Gehäusezeichnung und Herstellung
- Ansteuerung und Datenverarbeitung
Die Hardwarekommuniation bezieht sich auf die benötigten Platinen, welche für jede der verwendeten Varianten
gefertigt werden müssen. Diese ermöglichen die Kommunikation zwischen den einzelnen Elementen.
Das Hergestellte Gehäuse wurde mithilfe des 3D - Druck Verfahrens hergestellt und bietet den Bauteilen, sowie
dem Mikrocontroller und dem Akku für die Stromversorgung einen Lagerplatz, welcher für die Fixierung und Verwendung
Im OP optimiert wurde.
Die Ansteuerung und Datenverarbeitung wird mithilfe von speziell für den jeweiligen Sensor und Anwendung erstellten
Programmen realisiert. Diese werden auch verwendet um den Alarm im gegebenen Falle zu aktivieren und über das User Interface
anzusteuern.
1. Der Ultraschallsensor
Der Ultraschallsensor wird verwendet um eine Abstandsmessung durchzuführen.
Hierbei wird der Sensor zu der Rückseite des Transducers gerichtet und führt eine
kontinuierliche Abstandsmessung durch. Wenn der Transducer aus der Halterung fällt
,erhöht sich die gemessene Distanz weil das Objekt den Ultraschall nicht mehr reflektiert
und löst danach den Alarm aus.
2. Der 3 - Achsen Beschleunigungssensor
Dieser Sensor wird verwendet um eine Bewegung des Transducers festzustellen.
Hierfür wird er mit einer speziell erstellen Halterung an einen der Schläuch der
zum Transducer führenden Kochsalzlösung befestigt und kann dadurch im Falle
eines Herausfallens des Transducers eine Beschleunigung nach unten festellten und
den Alarm auslösen.
3. Das RFID - System
Mit dieser Methode werden die 2 Komponenten des RFID Systems so platziert, dass Der
Transducer zwischen den beiden Elementen liegt und somit eine Verbindung der Elemente
verhindert. Wenn das Element, welches das Signal unterbricht (Transducer) die Halterung
verlässt und dadurch eine Verbindung der RFID Elemente zulässt, wird der Alarm ausgelöst.

E-Mail: denis.sisic@htl-klu.at
E-Mail: paul.rogatsch@htl-klu.at
E-Mail: martin.kaefer@htl-klu.at