Lisa-Marie Gneist
Bildanalyse zur Wildtiererkennung
Deutsch
Das Projekt Wildschutzdrohne
befasst sich mit der Rettung von Wildtieren zum Schutz vor landwirtschaftlichen Maschinen.
Junge Wildtiere flüchten bei Gefahr nicht und sind bei landwirtschaftlichen Arbeiten nur
sehr schwer
in hohen Feldern zu erkennen. Deshalb sollen, mithilfe einer Drohne und einer
Wärmebildkamera,
Felder analysiert und Wildtiere nach Feststellung von Geo-Koordinaten gefunden werden.
English
The Wildlife Drone project is
concerned with the rescue of wild animals to protect them from agricultural machines.
Young wild animals do not flee in case of danger and are very difficult to spot in high fields
during agricultural work. Therefore, with the help of a drone and a thermal imaging camera,
fields are to be analysed and wild animals found after geo-coordinates are determined.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
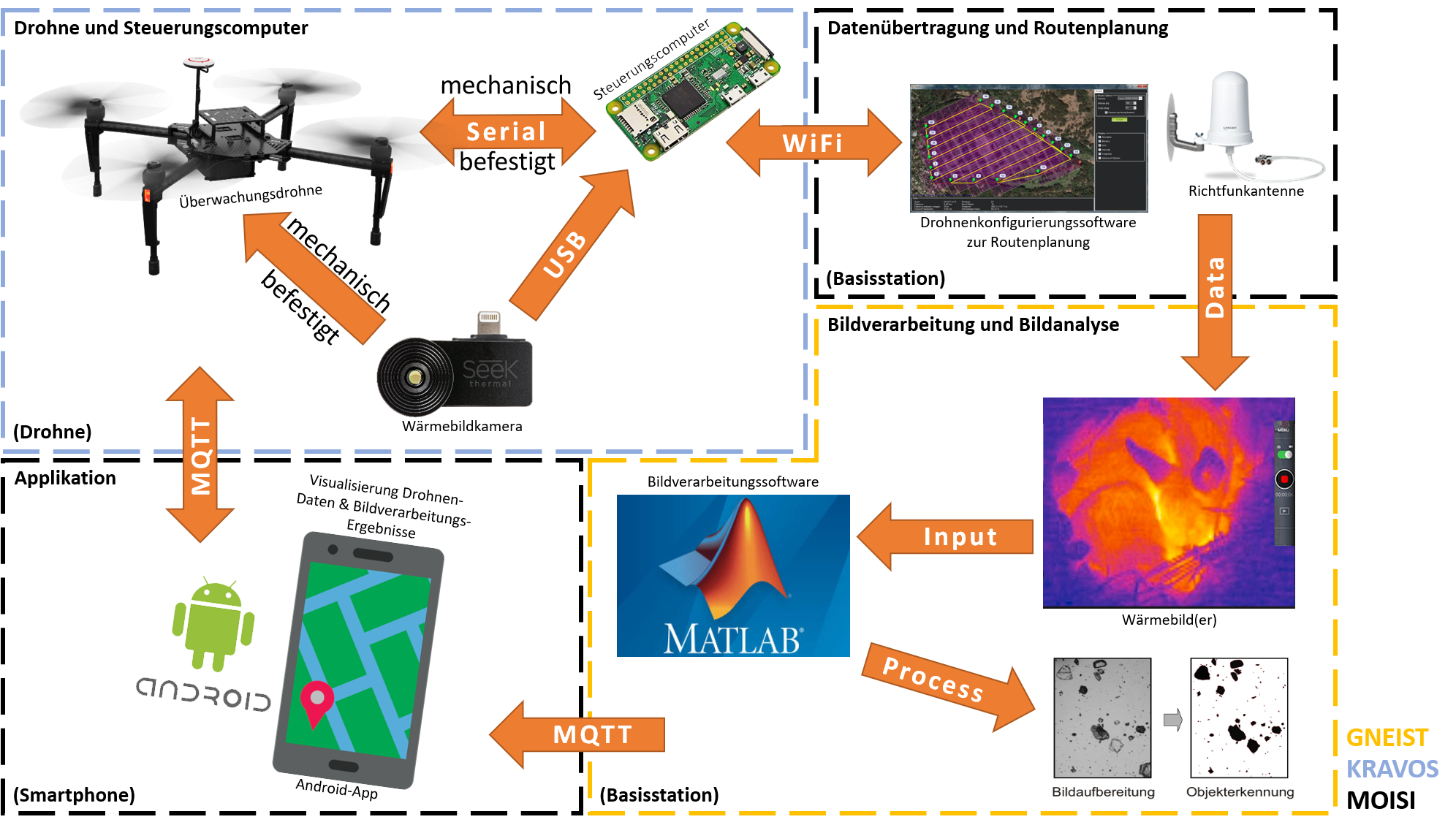
Die Gliederung des Projekts erfolgt in drei Teilbereiche. Erstens die Planung und der Bau der Überwachungsdrohen, sowie die Programmierung der Steuerungseinheit, als auch das Anbinden einer Wärmebildkamera, zweitens die Offline-Bildanalyse der Wärmebilder zur Wildtiererkennung, sowie die Registrierung der Bildsätze auf deren Geo-Koordinaten und drittens die Datenschnittstelle zwischen der Drohne und der Desktopsoftware als auch die Visualisierung der aktuellen Drohnenposition mittels Handy-App zur Kontrolle der geplanten Flugroute:

Als Drohne soll ein Quadrocopter verwendet werden. Ein Quadrocopter besitzt
vier in einer Ebene angeordnete Motoren, mit jeweils einem Propeller, welche
nach unten wirken und so einen Auftrieb erzeugen.
Auf dem Drohnenmarkt existieren bereits verschieden Wildschutzdrohnen,
doch das Problem ist, dass diese sehr teuer sind und zum Fliegen eine Genehmigung
benötigt wird.
Die Drohnenplanung und der Drohnenbau beschäftigt sich daher damit, die einzelnen
Drohnen-Komponenten so auszuwählen, dass die Drohne nicht zu schwer wird
(Gewicht in der Drohnenkategorie, Spielzeugkategorie),
jedoch eine akzeptable Flugdauer erreicht.
Die Steuerungseinheit besteht aus einem Steuerungscomputer und einem
Flugcontroller.
Ein Flugcontroller (englisch flight controller)
ist die wichtigste Komponente einer Drohne. Dieser übernimmt alle
wichtigen Aufgaben für die Flugsteuerung der Drohne.
Der Steuerungscomputer ermöglicht eine Kommunikation zwischen der
Drohne und der Desktopsoftware. Des Weiteren wird er benötigt, um
die geplanten Flugrouten vom Computer an die Drohne zu
übermitteln, die Wärmebildkamera auszulösen und die Wärmebilder
an den Computer zu senden, wo diese dann analysiert werden.
Die Aufgabe dieses Teilbereichs ist es, die Steuerungseinheit so
zu entwickeln und zu programmieren, dass als Mindestanforderung,
die oben genannten Funktionen im Endprodukt möglich sind.
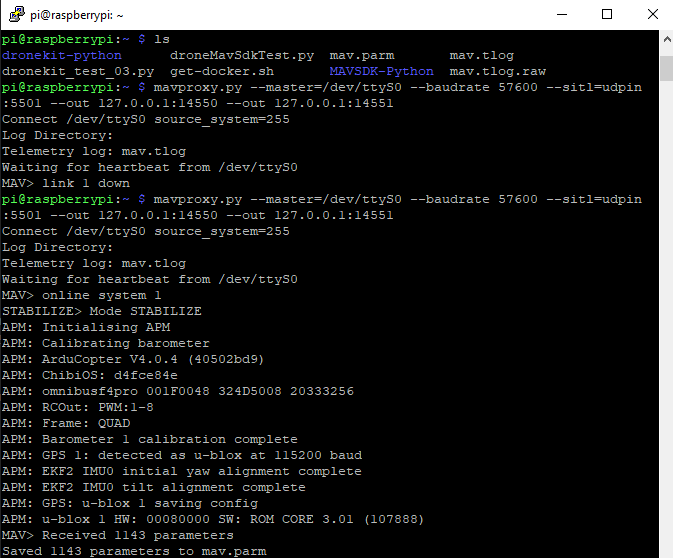
Zwischen dem Steuerungscomputer und dem Flugcontroller muss eine Kommunikation
aufgebaut werden, damit die Drohne von einem externen Computer gesteuert werden und
mit diesem Daten austauschen kann.
Des Weiteren muss der Steuerungscomputer mit der
Wärmebildkamera kommunizieren können, um Wärmebilder aufnehmen und an die
Desktopsoftware übermitteln zu können.
Dieser Teilbereich beschäftigt sich also mit der Kommunikation zwischen
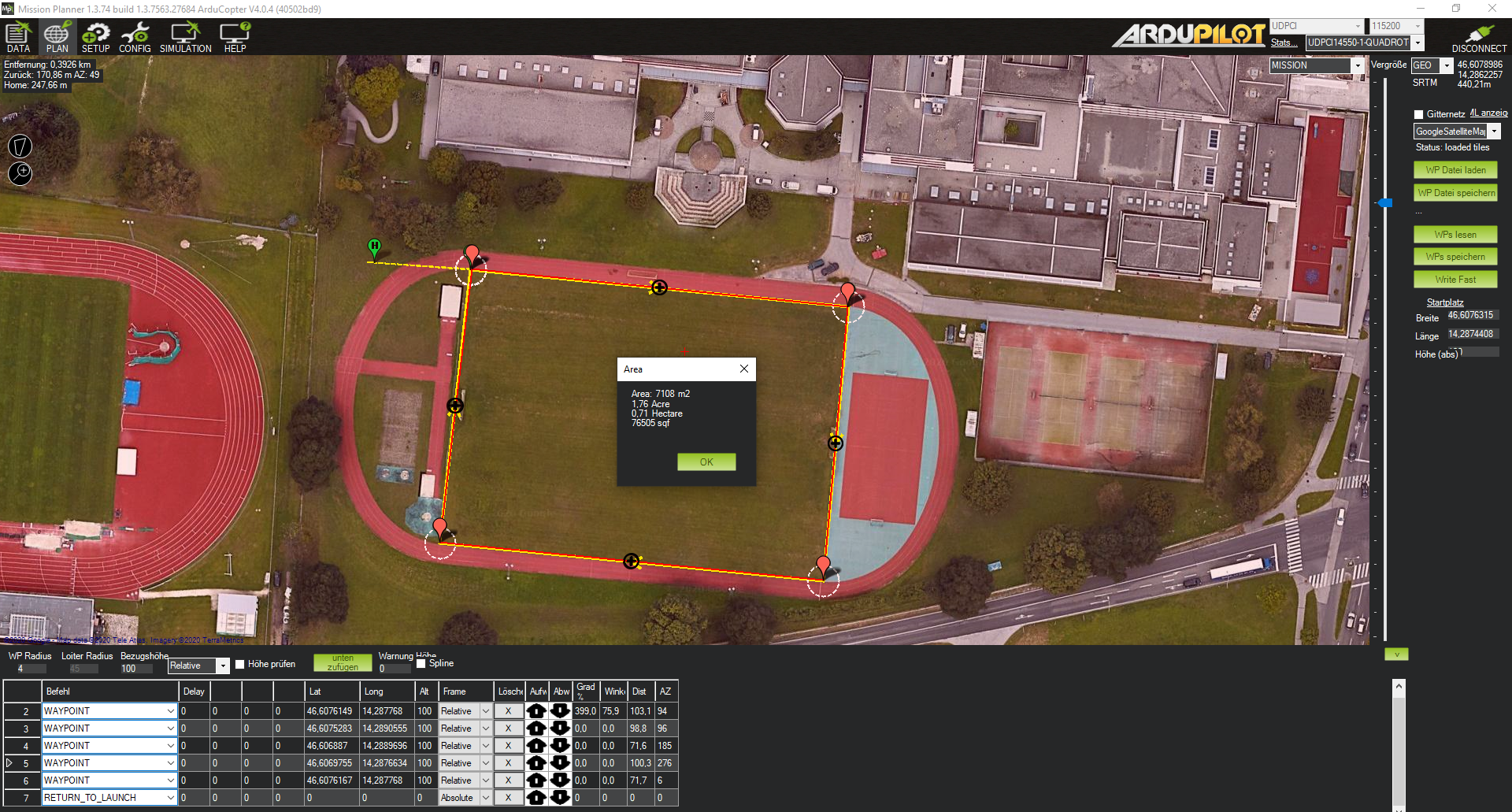
Zur Kommunikation zwischen Computer und Drohne wird das Programm
Mission-Planner benötigt.
Der Mission Planner ist eine „Ground Control Station“ für Flugzeuge,
Helikopter und Rover. Mission Planner kann als Konfigurationsprogramm
oder als Ergänzung zur dynamischen Steuerung eines autonomen Fahrzeugs
verwendet werden.
Die wichtigste Aufgabe hier, ist die Bedienung von Mission-Planner und
das Setzen und Planen der benötigten Flugrouten.

Bei der Segmentierung werden inhaltlich zusammenhängende Regionen erzeugt.
Dies wird durch das Zusammenfassen von benachbarten Pixeln entsprechend bestimmter
Homogenitätskriterien realisiert. In diesem Projekt wird die Segmentierung benötigt,
um einzelne Wärmequellen auf einem Bild hervorheben und vom Rest unterscheiden zu können.
Der Teil setzt sich mit der Segmentierung und Erkennung der Bilder auseinander.
Dabei werden die, von der Wärmebildkamera aufgenommenen und zur Desktopsoftware
übermittelten Wärmebilder, aus einem Verzeichnis ausgelesen und in einer Skriptsprache,
welche für Bildanalyse genutzt werden kann, segmentiert und auf Wärmequellen analysiert.
Es ist möglich Bilder einzulesen, die entsprechenden
Wärmequellen zu segmentieren, diese auf Tiere zu untersuchen,
erkannte Tiere kennzuzeichnen, die Bildsätze mit Geo-Koordinaten
registrieren und diese dem Benutzer am Ende hervorgehoben anzuzeigen.
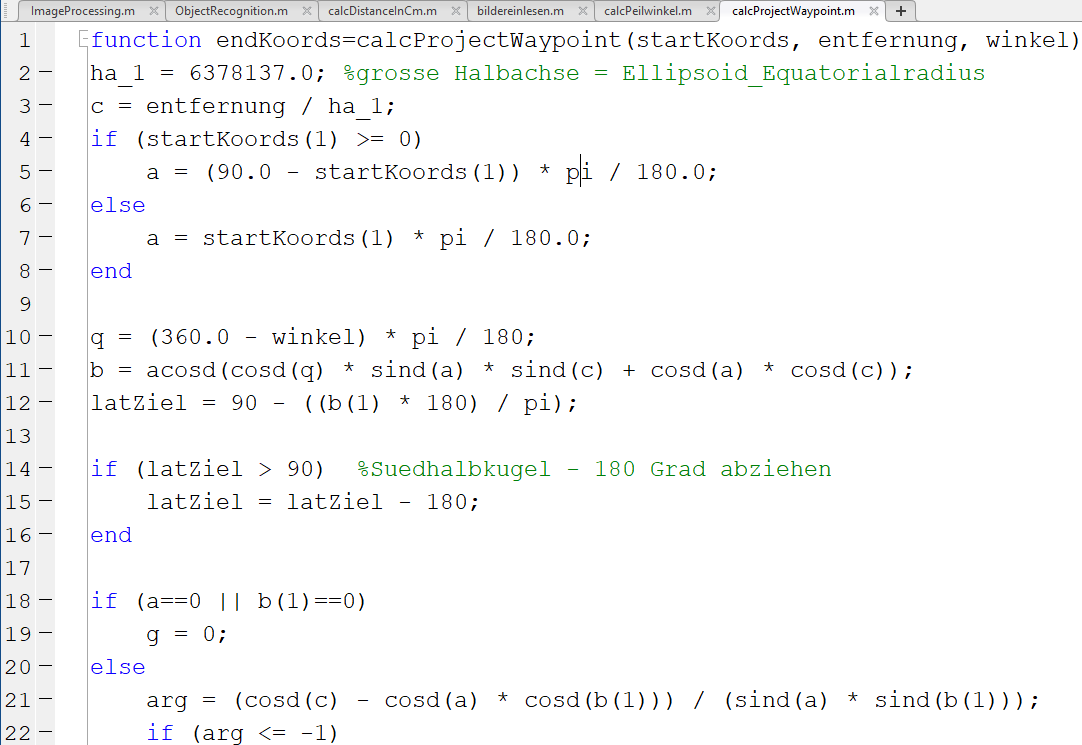
Aufgabe diese Teils ist das Ermitteln der Geo-Koordinaten der einzelnen,
erkannten Wärmequellen, mit Hilfe von gegebener GPS-Position der Drohne
und der Himmelsrichtung (In Grad angegeben, 0 bis 360 | 0 = Norden,
90 = Osten, usw...).
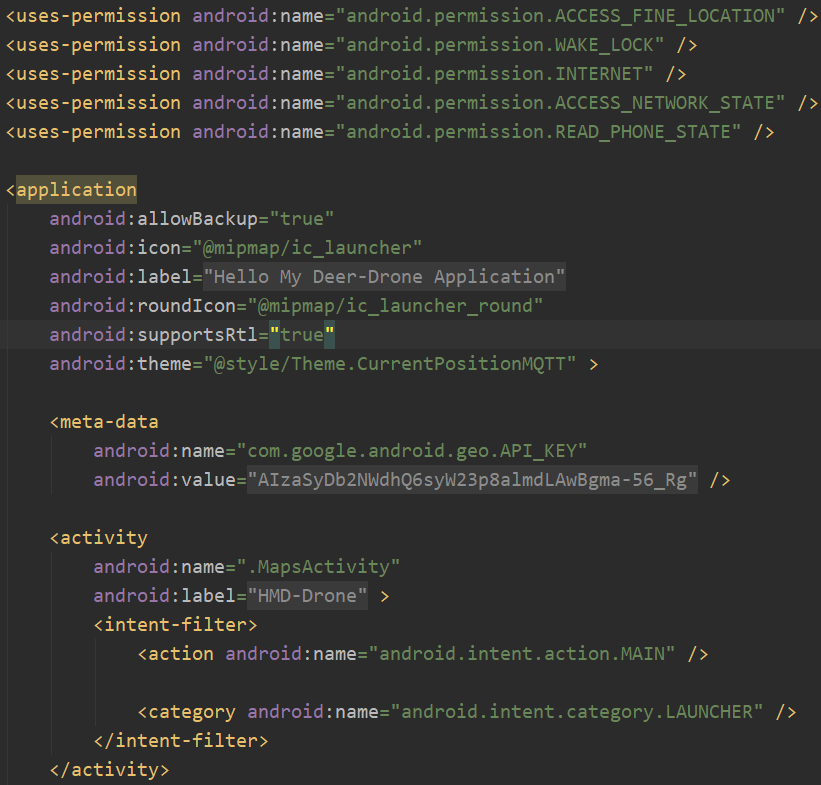
Mit der Smartphone Applikation werden die Aufnahmen der Wärmebildkamera dargestellt,
wobei man aber nicht in der Nähe der Basisstation sein muss.
Es ist auch möglich die Telemetry-Datemn der Drohne (Akkustand, aktuelle GPS-Position,
usw...) in der App einzusehen.
Aufabe dieses Teilbereichs ist es, die Anbindung der Handy-App an die Desktopsoftware
sowie der Datenaustausch zwischen der Handy-App und der Drohne.