Kurzbeschreibung
Problembeschreibung
In den letzten Jahren kam es häufig zu schweren Verkehrsunfällen in Autobahntunnels in Österreich. Die Tunnel sind derzeit flächendeckend video-überwacht. Die Kameras sind bautechnisch bedingt an der Tunneldecke montiert. Im Falle einer Rauchentwicklung (durch z.B. Feuer, Wasserdampf, …) werden diese Kameras nutzlos. Das automatische Lüftungssystem der Tunnels sorgt dafür, dass der Rauch der Tunneldecke entlang nach außen transportiert wird. Der Fahrbahnbereich wird dabei solange wie möglich rauchfrei gehalten. Vom Erkennen der Gefahr (Rauchentwicklung, Alarmierung, …) bis zum Eintreffen der Rettungskräfte kann sich so die Situation gegenüber der von den Kameras zuletzt erfassten wesentlich geändert haben. Autos können weiter gefahren sein, Personen können ausgestiegen sein, … Diese oft Lebensentscheidenden Informationen für Rettungskräfte über Position der Fahrzeuge im Tunnel, Personen im Tunnel, aktuelle Situation an der Gefahrenstelle, … sind mit der aktuellen Infrastruktur nicht verfügbar.
Projektidee
Um jeden Punkt eines Autobahntunnels genau überwachen zu können, wird ein Schlitten auf Schienen an der Decke den Tunnel befahren. Dieser Schlitten wird mit mehreren Kameras ausgerüstet sein, darunter eine Wärmebildkamera, um auch bei dichtestem Rauch Personen zu erkennen. Des Weiteren soll ein Lautsprecher Durchsagen im Tunnel ermöglichen. Das Fahrzeug fährt mit bis zu 100 Kilometer pro Stunde im Tunnel, um möglichst schnell am Einsatzort zu sein und wird von der Betriebswarte der Asfinag ferngesteuert. Im Notfall kann die Steuerung auch von den Einsatzkräften übernommen werden. Am Ende des Tunnels wird das Fahrzeug in einer entsprechenden Ladestation aufgeladen und kann mit einer Akkuladung eine Stunde im Tunnel fahren. Im Normalbetrieb kann HASCY verwendet werden um im Tunnel fahrende Gefahrguttransporte zu begleiten und so Gefahren vorzeitig zu erkennen. Ungewöhnliche Hitze-Entwicklungen z.B. können dank der Thermokamera leicht erkannt werden.
Innovation
Nachdem sich der Schlitten frei im Tunnel bewegen kann, ermöglicht dies den Einsatzkräften im Notfall einen bis dahin noch nie dagewesenen Überblick über die Gefahrensituation. Die Arbeit der Rettungskräfte wird somit optimiert und die Überlebenschance für Unfallopfer gesteigert. Im Normalbetrieb können z.B. Steckende Bremsen bei LKWs zu einem Reifenbrand und somit zu einer Katastrophe führen. Die Wärmebildkamera kann solche Gefahren bereits im Vorhinein erkennen und durch korrektes Handeln abwenden.
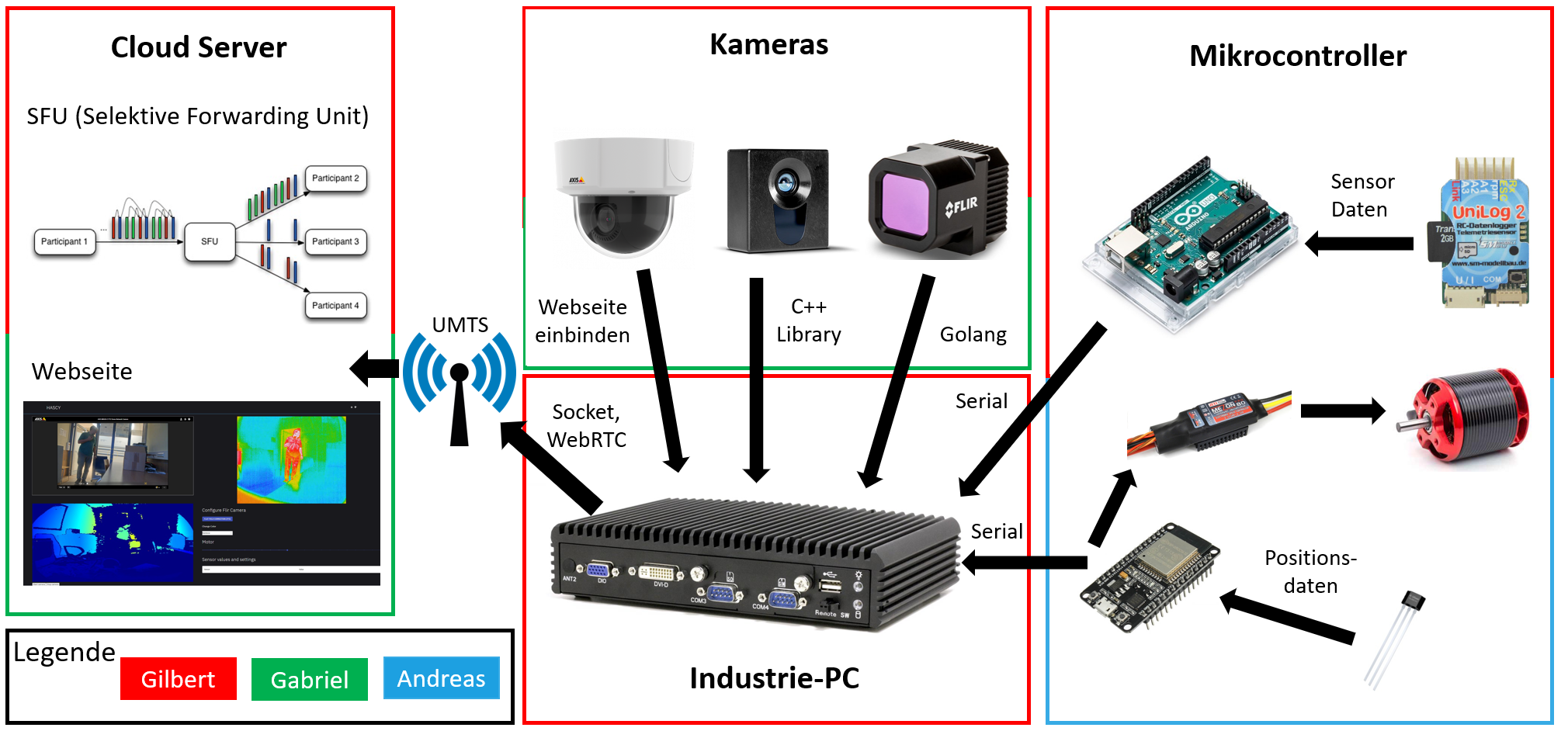
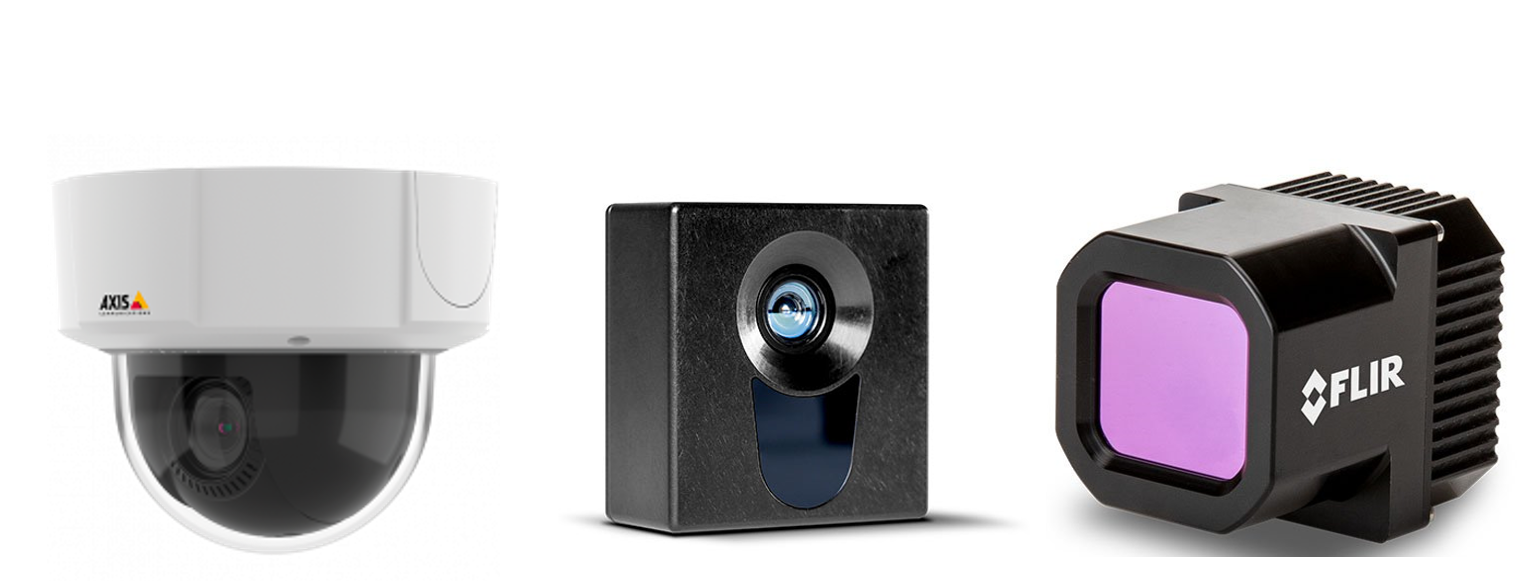
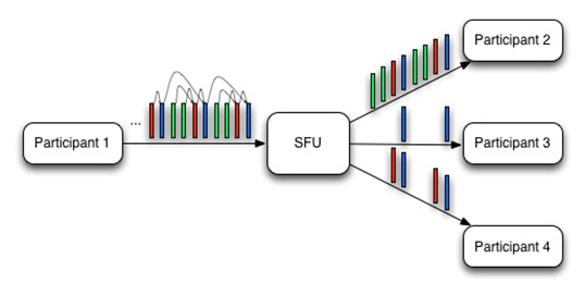
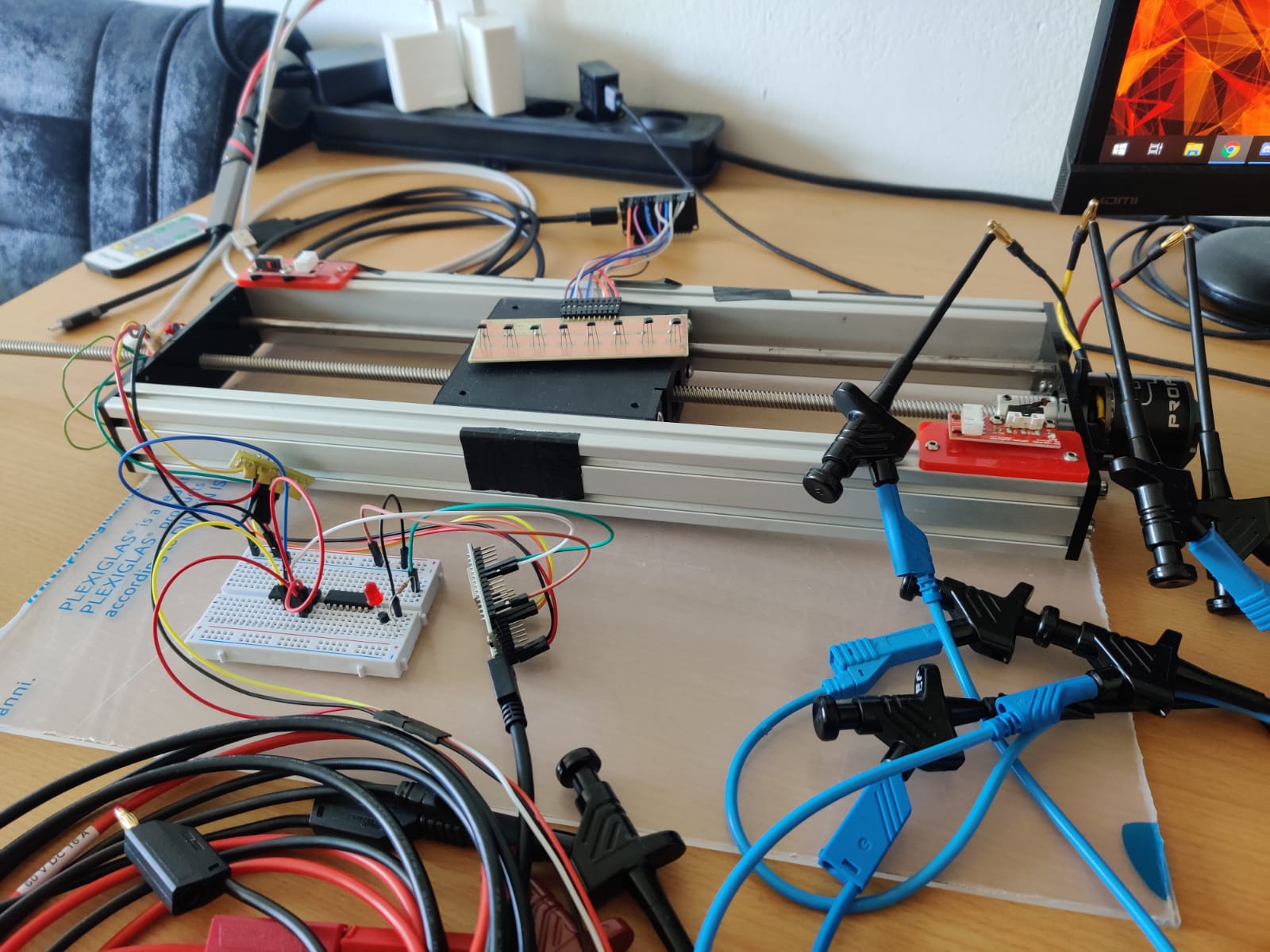
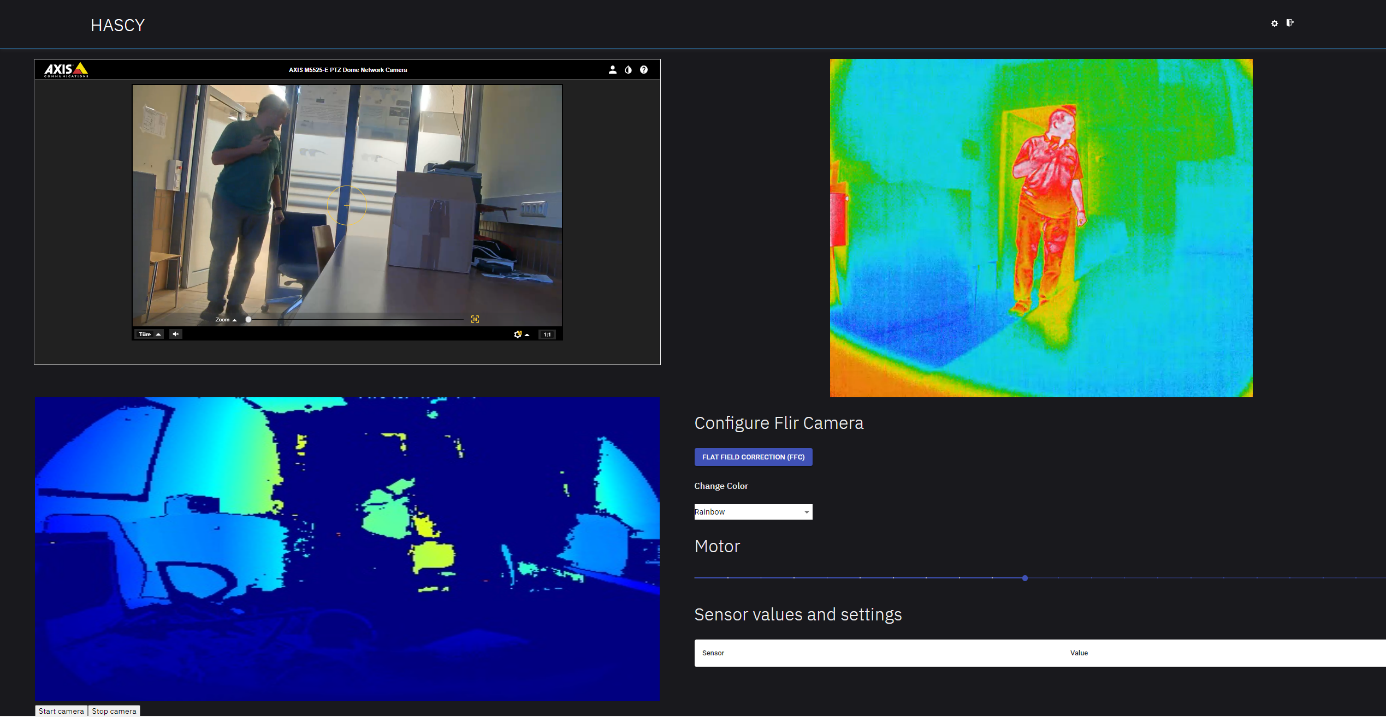
Das Fahrzeug fährt auf einer an der Tunneldecke angebrachten Schiene im Tunnel entlang. Sowohl das Antriebsystem als auch die Form und Befestigung der Schiene müssen komplett selbst entwickelt werden, weil es keine vergleichbaren Systeme auf der Welt gibt. Der ferngesteuerte Ladevorgang des Fahrzeuges läuft komplett automatisiert ab. Das Zusammenspiel der drei verwendeten Kameras (3D-Kamera, Wärmebildkamera und optische Kamera) ist bisher in noch keinem System so verwendet und muss vollkommen neu realisiert werden. Ein Steuerungs-Interface muss für diesen einzigartigen Schlitten ebenfalls neu konstruiert werden. Die Daten werden über UMTS an einen externen Server übertagen und können da sowohl von der Tunnelwarte wie auch von Einsatzkräften gleichzeitig angezeigt werden. Der Rahmen und die Elektronik für die Ansteuerung des Fahrzeuges müssen speziell an die Anforderungen des Fahrzeuges angepasst und entwickelt werden. Um die Funktionsfähigkeit zu testen, wird ein Prototyp gebaut und an einer entsprechenden Teststrecke mehrere Monate intensiven Tests unterzogen. Parallel dazu wird der Falkenbergtunnel mit 1200m Länge an der A2 im Norden von Klagenfurt mit einem Schienensystem ausgerüstet. Schließlich nimmt eine optimierte Version der Drohne im Tunnel ihren Dienst auf.
Für die Konstruktion und Entwicklung werden die modernsten Technologien verwendet. Die Fertigung der einzelnen Bauteile für das Fahrzeug und das Schienensystem werden in österreichischen Firmen als Einzelstücke hergestellt. Wie bei vielen neuen Konstruktionen, wird das Fahrzeug zuerst intensiven Tests unterzogen, um es auf Funktionalität zu untersuchen und entsprechende Fehler auszubessern. Die Konstruktion wird entsprechend der neuen Erkenntnisse adaptiert und ein verbessertes Fahrzeug gefertigt.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Dieses Projekt wird gemeinsam mit einem Wirtschaftspartner durchgeführt: