Clemens Aigner
Projektmanagement, Erstellung der Simulation
clemens.aigner@htl-klu.at

Deutsch Ziel des Projektes ist es, einen zyklischen Sortierablauf mithilfe des IRB 140 zu realisieren. Um dies zu erreichen, wird der Pufferakkumulator der Anlage ausgetauscht und verbessert. Der Sortierablauf wird zuerst in der Software ROBOTSTUDIO simuliert, um mögliche Probleme zu beheben. Zuerst entnimmt der Roboter eine Box aus der Eingabe und bewegt diese zu dem QR-Code Scanner, wo die Artikel- und Seriennummer eingelesen und wiedergegeben wird, schließlich gibt er die Box auf einer Ausgabe aus.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English The aim of the project is to implement a cyclic sorting process using the IRB 140. To achieve this, the buffer accumulator of the system is replaced and improved. The sorting process is first simulated in the software ROBOTSTUDIO to solve possible problems. First, the robot removes a box from the input and moves it to the QR-Code Scanner, where the article and serial number is read and reproduced, finally it outputs the box on an output.

Die CAD-Zeichnungen die wir in dem Programm Solidworks zeichnen, dienen uns als Hilfe für die Konstruktion und zur Veranschaulichung in der Simulation. Hier sehen Sie eines der wichtigsten Teile in unserem Projekt, das Eingabe-Magazin von dort aus entnimmt der IRB 140 die Kartonboxen und bewegt sich mit diesen auf seinem "Pfad" zur Ausgabe.
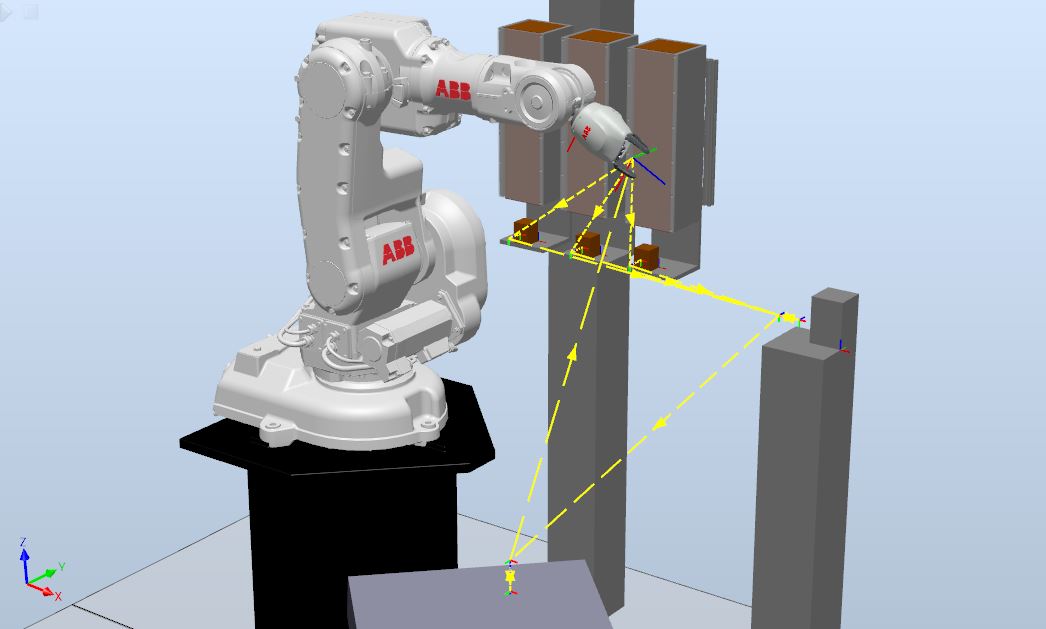
Hier sehen Sie einen Screenshot aus dem Programm RobotStudio, dies ist unser Programm welches zur Simulation der Bewegungsabläufe und zur Testung der Machbarkeit dient. Das Programm kann seinen RAPID-Code, wenn die Anlage es zulässt, direkt an den Roboter senden und somit sind keine weiteren Programmiervorgänge Vorort notwenig. Unser Roboter hat diese Schnittstelle nicht und somit ist unsere Simulation nur eine Veranschaulichung für den Ablauf.

clemens.aigner@htl-klu.at

florian.kröpfl@htl-klu.at

fabian.plank@htl-klu.at

christian.paul@htl-klu.at