Willkommen
Herzlich willkommen auf unserer Projektseite. Auf dieser Homepage erhalten Sie Informationen rund um das Projekt Slippery Slope.
Kurzbeschreibung
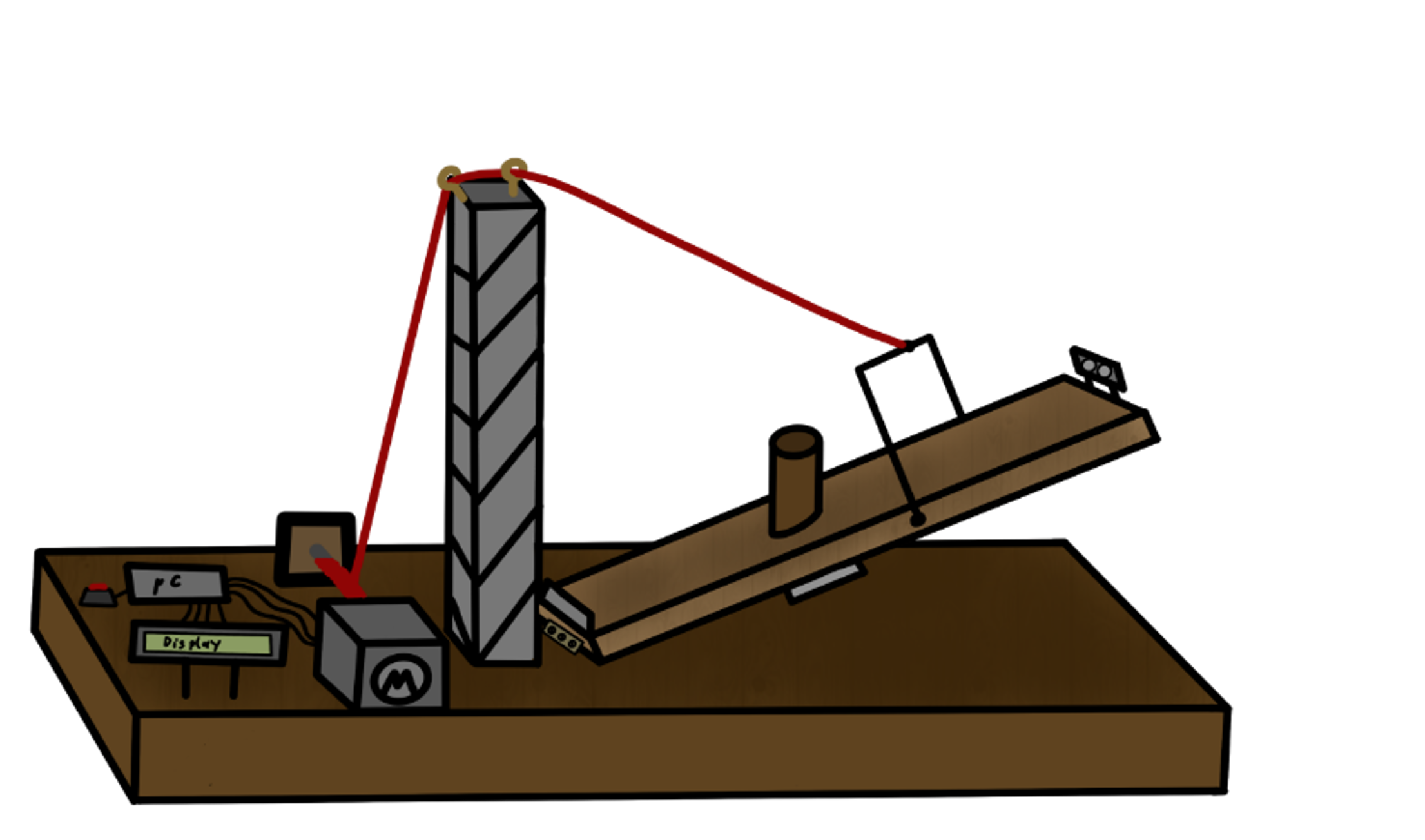
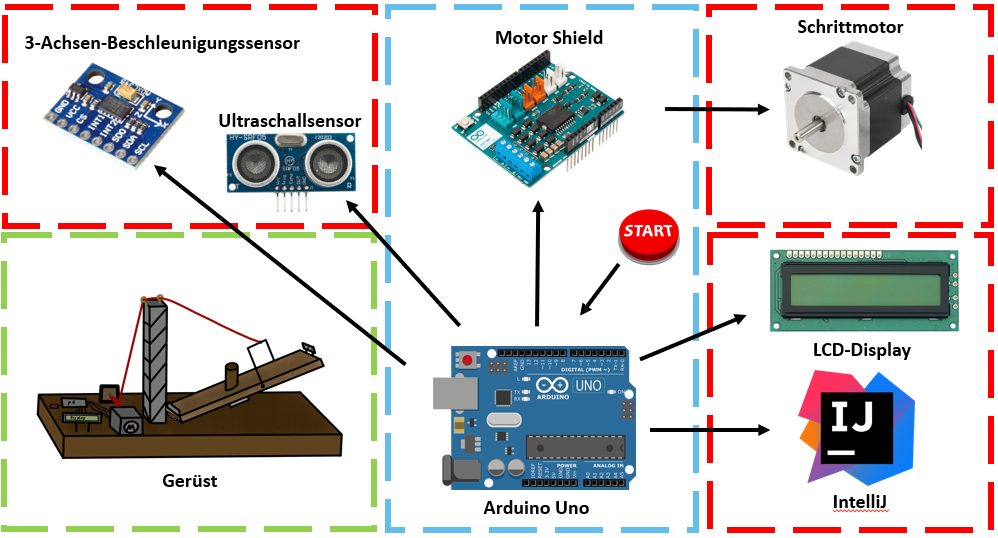
Deutsch Die Slippery Slope ist eine Konstruktion, die mithilfe von Sensoren und eines Motors den Zustand eines Objekts auf einer Rampe erfassen kann. Fängt das Objekt an zu rutschen wird der Winkel der Rampe und die Geschwindigkeit des Objekts erfasst, aus welchen man den Haft- und Gleitreibungskoeffizient berechnen kann.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English The Slippery Slope is a construction that uses sensors and a motor to detect the condition of an object on a ramp. If the object starts to slide, the angle of the ramp and the speed of the object are recorded, from which the coefficient of static and dynamic friction can be calculated.