
Das Brightness Analysis Tool besteht aus folgenden Bereichen:

BAT ist eine Erweiterung, welche auf das Projekt "Safety Cat" aufbaut. Durch verschiedenste Sensoren soll es so möglich werden, eine autonome Reinigung von Tunnelleuchten ohne Tunnelsperre durchzuführen. Dabei werden folgende Funktionen mit Hilfe von drei Kameras ermöglicht:
BAT erkennt die Position von Lampen in einem Tunnel. Dies wird durch eine Kamera ermöglicht, die besonders helle Stellen in einem Bild lokalisiert. Die Position wird markiert, um eine Reinigung zu ermöglichen.
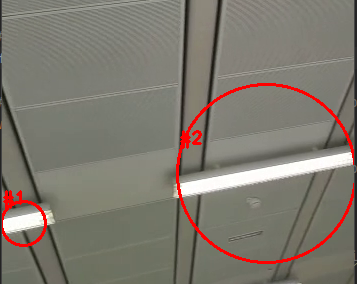

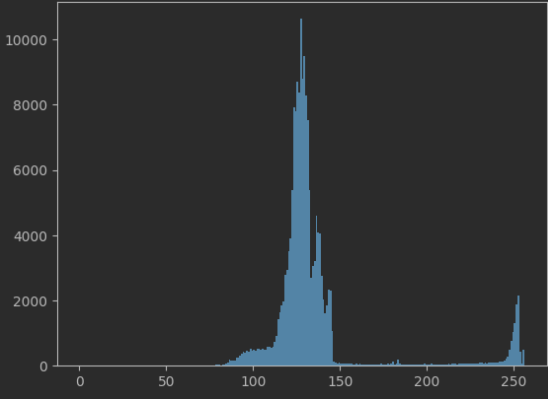
Anhand der ersten Durchfahrt durch einen Tunnel wird die Musterhelligkeit bestimmt. Anhand dieser wird dann nach jedem Durchlauf die Helligkeit verglichen. Dadurch kann schnell und zuverlässig eine Verschmutzung der Lampen festgestellt werden.
Um die Verkerhssicherheit während eines Reinigungsprozesses zu gewährleisten, wird dieser gestoppt, wenn ein Fahrzeug erkannt wird. Die Erkennung erfolgt mit Hilfe eines KI-Modells.

Marko Tatic
Life is a lose-lose Situation
Lampen- und Schmutzerkennung
Ulrich von Lebitsch
Tod zu sein ist wie dumm zu sein: nur schmerzhaft für andere
Kartographierung

Paul Wasner
4 gewinnt
Fahrzeugerkennung
Dipl.-Ing. Harald Grünanger
Echt oder was?
Projektbetreuer