David Nikolic
Erstellung der Datenbank, Freigabe
Deutsch Die Zukunft der Mobilität liegt wohl in der überwiegenden Nutzung von Elektro Autos zur Fortbewegung. Diese werden derzeit mittels Ladekabel geladen, welche in sogenannte E-Ladestationen gesteckt werden. Mittels Induktion können aber E-Autos in Zukunft auch kontaktfrei durch im Boden eingelassene Spulen geladen werden. Beim vorliegenden Projekt soll ein Auto mithilfe eines Navigations-Assistenten genau über der Ladestation im Boden positioniert werden. Die exakte Positionierung erfolgt mittels am Auto montierter GPS-Tracker, die auf einem Display angezeigt werden. Danach werden automatisch aus einer Datenbank Informationen über das Auto abgefragt, deren Auswertung den Ladevorgang erlauben, aber auch ablehnen kann. Das induktive Laden selbst ist nicht Teil der Diplomarbeit.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Dieses Projekt wird gemeinsam mit einem Wirtschaftspartner durchgeführt:

English The future of mobility lies in the predominant use of electric cars for locomotion. These are currently charged using charging cables, which are plugged into so-called e-charging stations. Using induction, however, e-cars can also be charged contact-free in the future using coils embedded in the floor. In the present project, a car is to be positioned exactly above the charging station in the ground with the help of a navigation assistant. The exact positioning is carried out using GPS trackers mounted on the car, which are shown on a display. Information about the car is then automatically queried from a database, the evaluation of which can allow or reject the charging process. The inductive charging itself is not part of the thesis.
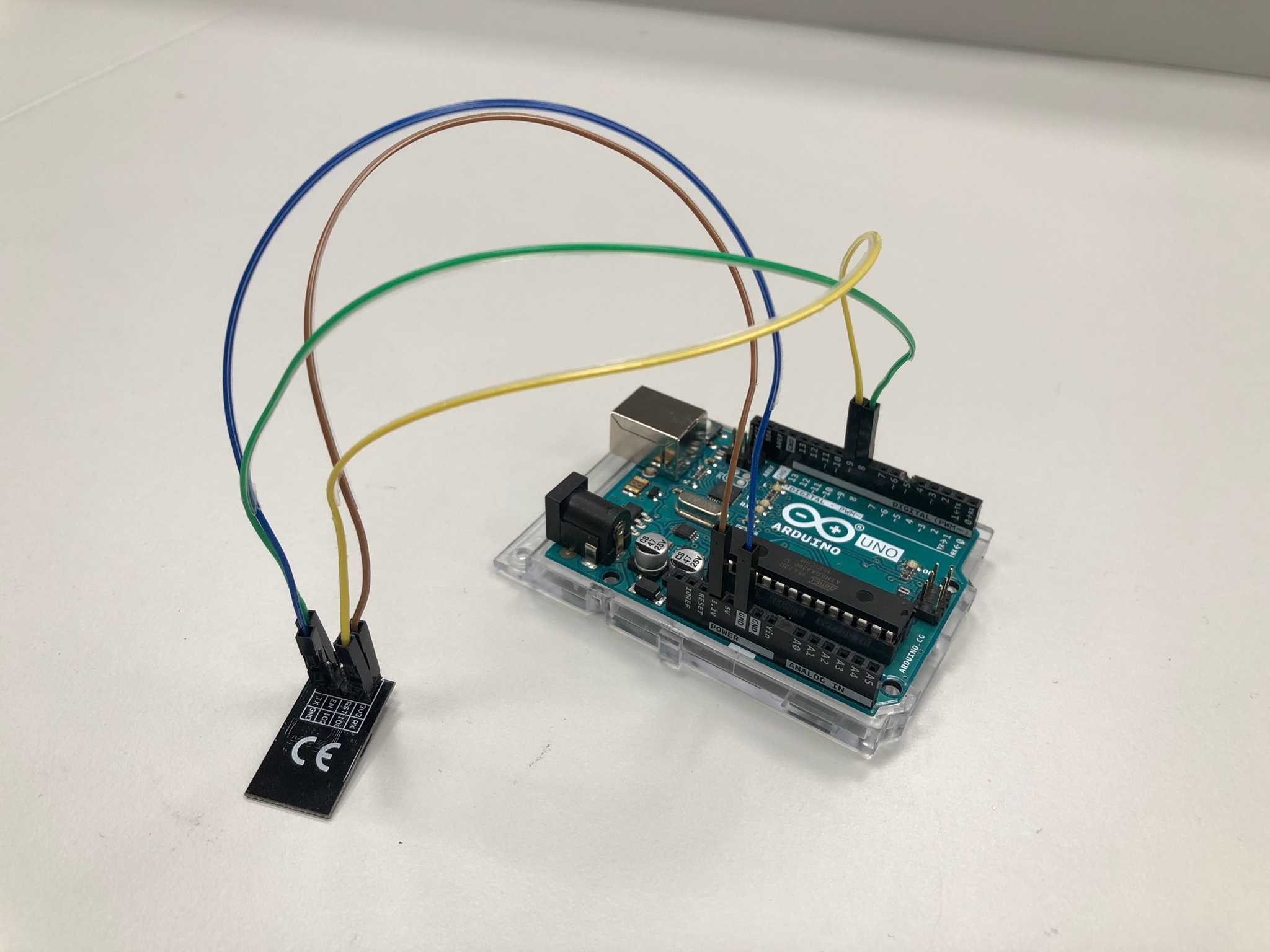
Das Arduino UNO ist eine Steuersystem beziehungsweise ein Microcontroller, bei dem die Ausgänge je nach Programmierung und in Abhängigkeit der Eingänge reagieren. Unser Arduino wird für mehrere Anwendungen benutzt: für die Positionierung, für die Freigabe und für die Visualisierung. Die verschiedene Programme wurden durch zahlreiche Vorlagen und Libraries für die jeweiligen Programmierungen unterstützt. Wie beispielsweise hier: Für das Programmieren der Freigabe müsste man zuerst ein Wifi-Modul (ESP8266) implementieren (links), welches sich mit dem Wlan verbindet und man somit mit dem Arduino-Code auf die Datenbank zugreifen kann.
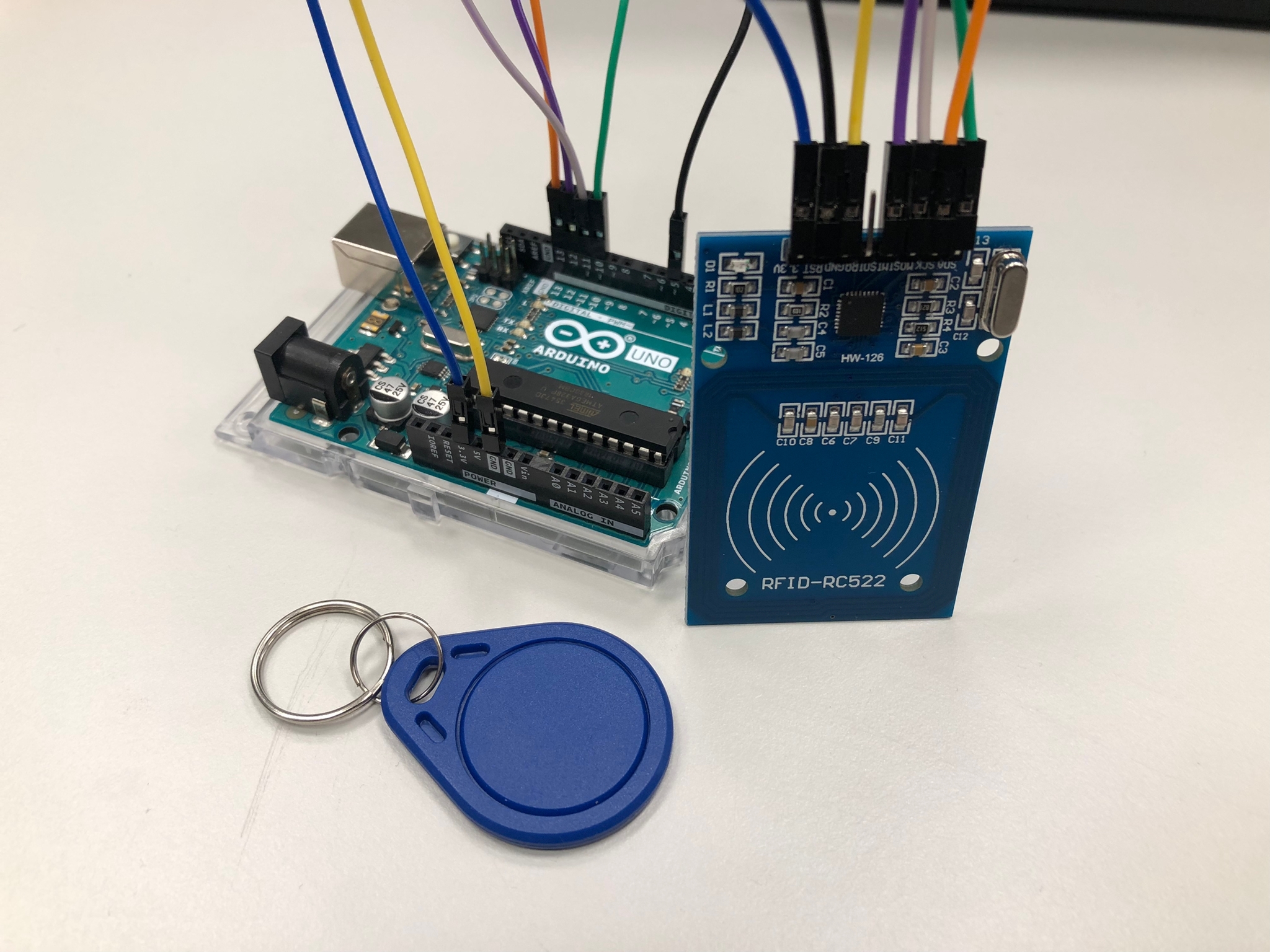
Für die Freigabe wird ein RFID-Chip Reader (RC522) benutzt, welcher die RFIDs lesen und umschreiben kann. Dieser nimmt mithilfe des Wifi-Moduls kontakt mit der Datenbank auf und stellt fest, ob das jeweilige Chip Zugang zur Ladestation hat. Wenn der Chip keinen Zugang hat wird die Freigabe zum Laden abgelehnt.
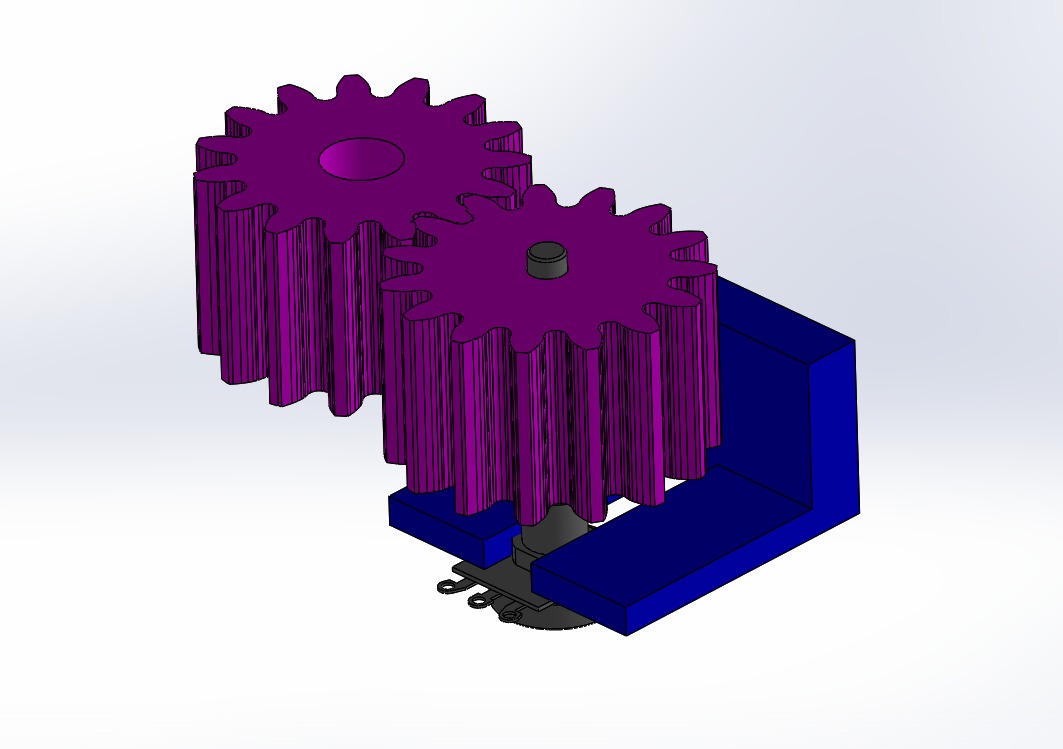
Konstruktion von zwei Zahnrädern wobei ein Zahnrad an der Lenkstange des Fahrzeuges befestigt wird und das zweite anliegend an dem ersten Zahnrad mit einem Potentiometer verbunden ist (siehe Abbildung). Das Potentiometer wird dann mit dem Arduino sowie dem Display-Shield verkabelt, wobei das Display-Shield zusammen mit dem Arduino mit einer Vorrichtung am Fahrzeug befestigt wird um somit während der Fahrt auf dem Display den programmierten Lenkeinschlag sehen kann.

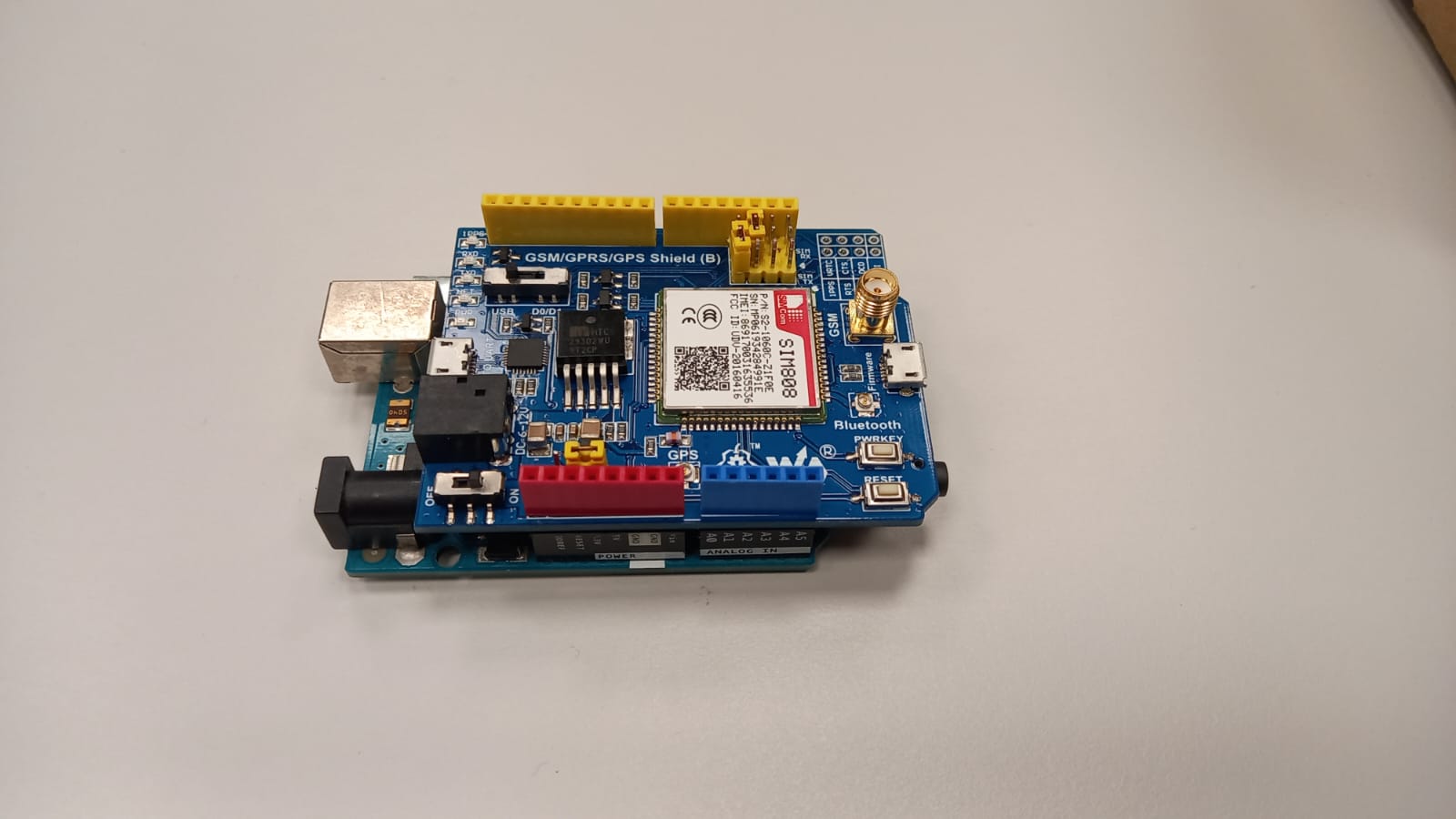
Mithilfe des SIM808 GPS/GPRS/GSM wird die Positionierung des E-Autos und der Ladestation dargestellt. Dies ist dann am Display, welches im Auto montiert wird, ersichtlich. Programmiert wird der GPS-Empfänger mit dem Arduino UNO. Ziel der Programmierung ist die Auslesung der Koordinaten des Autos und der Ladestation. Längen- und Breitengrade sollen auslesbar sein. Mithilfe der Koordinaten ist die Visualisierung erst möglich, mit der die GPS-Daten am Display sichtbar sind.