Michael Kotschnig
Konstruktion, 3D-Modellierung und Verdrahtungsplan
...
Deutsch Das Ziel dieser Diplomarbeit ist es, den Prototypen eines Schikantenschleifers zu bauen, welcher gleichmäßig und gleichzeitig beide Kanten schleifen soll. Die Schleifmaschine soll ohne technischem Geschick und Verständnis bedienbar sein. Des Weiteren ist der Prototyp akkubetrieben und somit überall einsetzbar.
Auf eisigen und griffigen Schipisten werden die Schikanten sehr stark beansprucht. Um den optimalen Fahrspaß für Hobbyschifahrer zu garantieren, soll diese Maschine das jährliche Schiservice und das schnelle Nachschleifen der Kanten erleichtern.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English The aim of this project is to develop a prototype of a ski edge tuning device which should evenly and simultaneously tune both edges. The tuning machine should be operable without technical skills and understanding. Furthermore, the prototype is powered by a battery and can therefore be used anywhere.
The ski edges are put under a lot of strain on icy ski slopes. For the optimal guaranteed driving experience for amateur skiers this machine should render the annual ski service and the facilitate quick regrinding of the edges much easier.
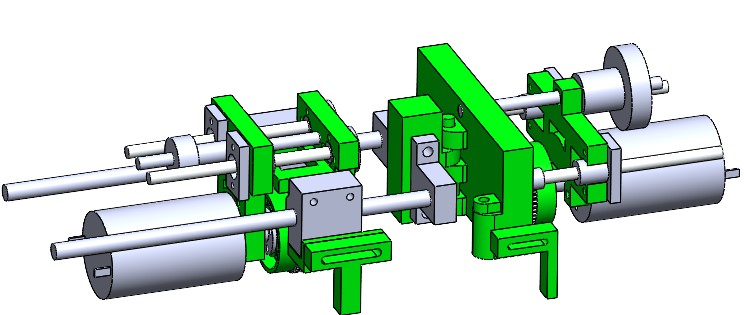
Der Prototyp kann durch einfaches Auseinanderziehen der beiden Schleifscheiben auf den Schikanten fixiert werden. Bei unserem automatischen Schikantenschleifer werden zwei Schleifscheiben über jeweils einen Gleichstrommotoren angetrieben. Die Taillierung des Schis wird mittels Federkraft in Form von Zugfedern bewältigt. Die Schleifscheibe wird über eine Stellschraube und eine Druckfeder angetastet. Dadurch wird eine konstante, definierte Materialabtragung realisiert.
Die Drehzahlsteuerung wird mittels eines Arduino Uno und entsprechender Software umgesetzt. Des Weiteren wird der Mikrocontroller dazu verwendet, den Antrieb zu steuern. Der automatische Schikantenschleifer soll nämlich mit einer konstanten Geschwindigkeit dem Schi entlangfahren. Dadurch wird ebenfalls ein gleichbleibender Materialvorschub gewährleistet. Außerdem muss die Maschine an einem im Vorhinein definierten Punkt zum Stillstand kommen. Dies erfolgt mit entsprechender Aktorik und Sensorik.

...

Failure's not an option. It's just a step - Dwayne Johnson

...

...