Tony Monsberger
HARDWAREENTWICKLER,PLATINE,GERÜST & ANSTEUERUNG
 C.L.T.
C.L.T.
Controllable Laser Turret
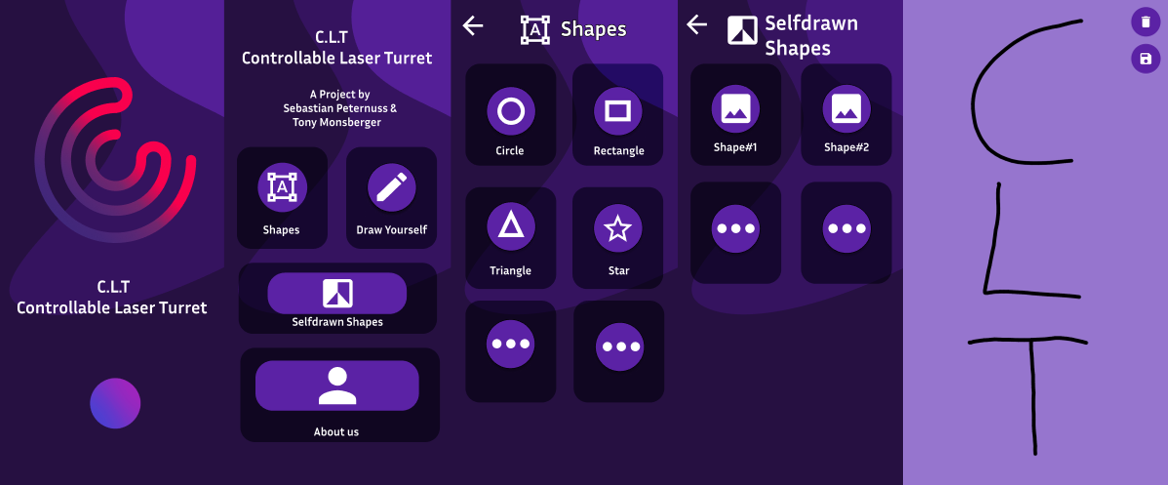
Dieses Projekt befasst sich mit der Erstellung eines Laserturms, welcher per Android App gesteuert wird. Die App besitzt eine einfach zu benutzende Benutzeroberfläche, welche dem Bediener die Möglichkeit gibt, den Pfad, auf welchem sich der Laserpunkt bewegt selbst zu bestimmen. Darunter befinden sich auch Templates die der App zur Verfügung gestellt werden, welche zum Beispiel die momentane Uhrzeit oder Temperatur ausgeben. Das Endprodukt ist ein vollfunktionsfertiger Laserprojektor der alle auf der App gezeichneten Schemen übernimmt und anschließend auf eine Wand projiziert.
Der Lichtpunkt eines Laserpointers soll eine vorgegebene Grafik auf eine Fläche projizieren. Durch eine spezielle nachleuchtende Beschichtung der Projektionsfläche bleibt die Grafik sichtbar auch wenn der Laserpunkt gerade nicht eingeschalten ist.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Das Projekt wird in zwei Module unterteilt.
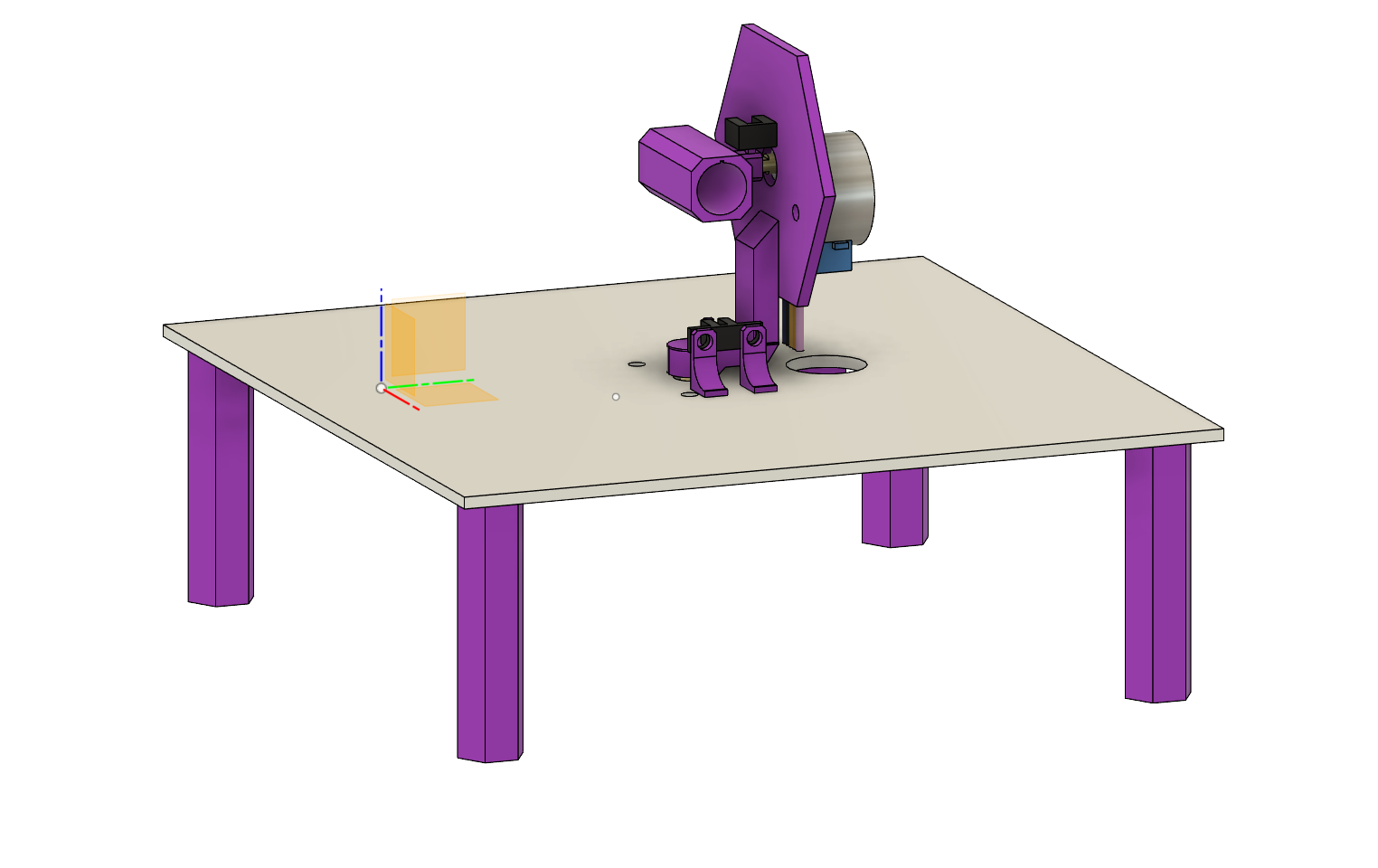
Das Modul Hardware bildet sich prinzipiell aus drei Teilen, einerseits mit der Erstellung eines 3D Gerüsts. Dieses lässt die Schrittmotoren miteinander in einer XY-Schematik funktionieren. Andererseits mit der Erstellung einer Trägerplatine, welche dazu dient alle verwendeten Bauelemente miteinander zu verbinden. Für die Projektion wird ein bestimmtes Nachleuchtepulver verwendet, welches dazu dient aufgezeichnete Bilder mit einem nachleuchte Effekt darzustellen. Die Schrittmotoren welche die Richtung des UV-Lasers bestimmen werden über den Esp32 gesteuert welcher die Befehle für die Schrittmotoren über Bluetooth von der Handy App empfängt. Der UV-Laser wird anschließend so positioniert, dass dieser gewisse Grafiken auf der Projektionsfläche darstellen kann.
Das Modul Software befasst sich mit der Handyapplikation. Mit dieser können stehende und sich bewegende Bilder projiziert werden. Weiters werden auch Bilder projiziert, die der Benutzer selbst auf der Handyapplikation zeichnet. Die Aufgabe der Handyapplikation ist die Kommunikation zum Mikrocontroller via Bluetooth. Der Mikrocontroller steuert dann die 2 Schrittmotoren an, welche eine Ausgabe projizieren.