Florian Sutterlüty
Entwicklung, Design, Projektmanagement, Bauteilauswahl
"To drive fast is like boobs, i like to drive fast"
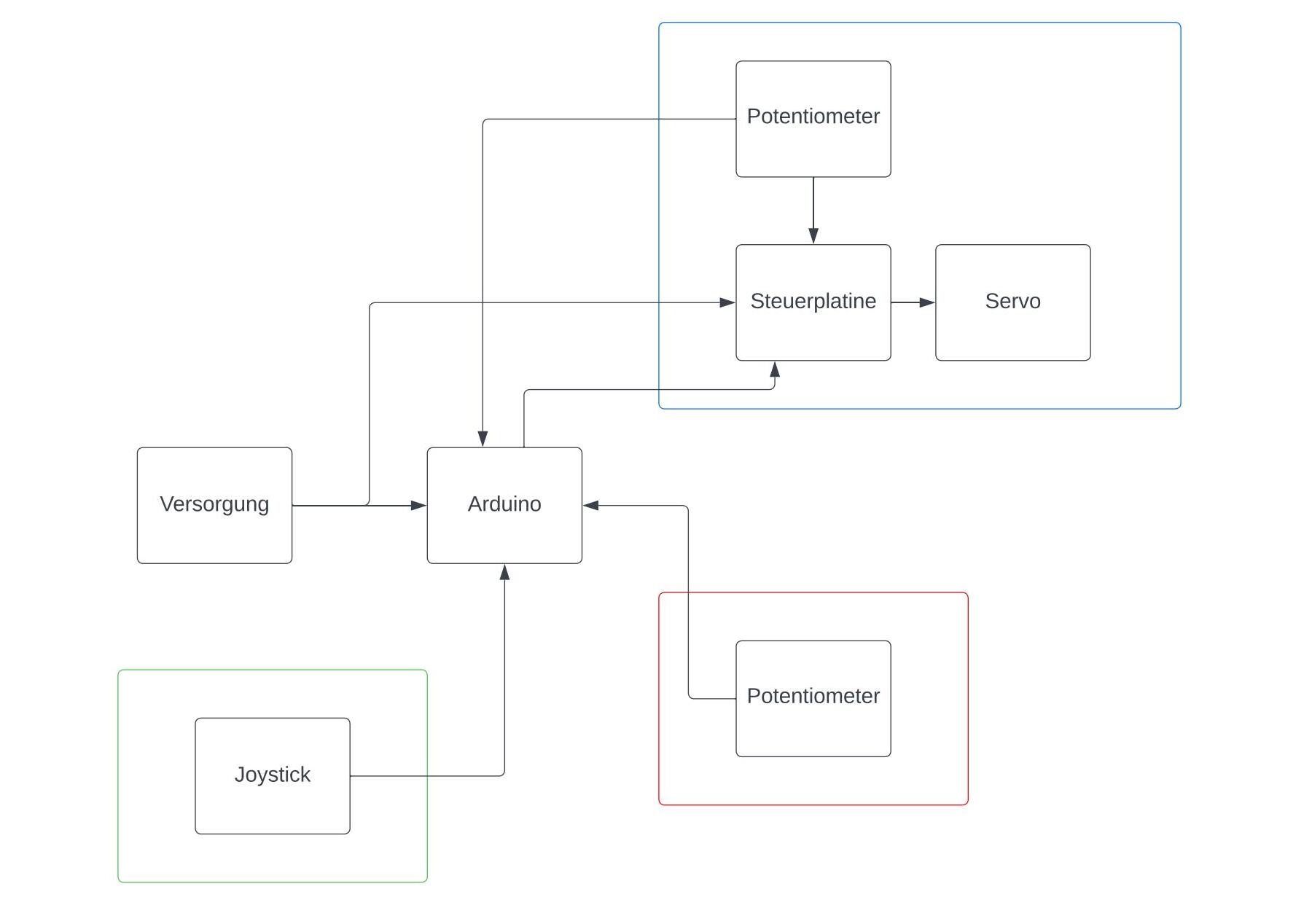
Deutsch Das Projekt „Bionic Hand“ hat das Ziel, menschliche Hand- und Fingerbewegungen nachzuahmen, um eine funktionale Prothese zu entwickeln. Die Steuerung erfolgt über einen Arduino-Mikrocontroller, der die Servomotoren steuert, die die Bewegungen der Handgelenke und Finger ermöglichen. Um die genaue Position der Gelenke zu messen, werden Drehwinkelpotentiometer eingesetzt. Diese messen den aktuellen Winkel (Istwert) und vergleichen ihn mit dem Zielwert (Sollwert). Wenn eine Abweichung zwischen Istwert und Sollwert festgestellt wird, bewegt der Servomotor das Gelenk, bis beide Werte übereinstimmen. Dadurch wird eine präzise Steuerung der Hand ermöglicht, die es der Bionic Hand erlaubt, sich in verschiedenen Positionen zu bewegen und die natürlichen Bewegungen einer echten Hand nachzubilden. So bietet das Projekt eine vielversprechende Lösung für die Wiederherstellung der Handfunktion bei Amputationen.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
English The "Bionic Hand" project aims to replicate human hand and finger movements to develop a functional prosthesis. The control is managed by an Arduino microcontroller, which directs the servomotors responsible for the movement of the hand and fingers. To measure the exact position of the joints, rotary angle potentiometers are used. These measure the current angle (actual value) and compare it with the target value (desired position). If a discrepancy is detected between the actual and desired values, the servomotor moves the joint until both values match. This enables precise control of the hand, allowing the Bionic Hand to move into different positions and mimic the natural movements of a real hand. This project offers a promising solution for restoring hand function in amputees.
Es soll eine Roboterhand konstruiert werden, die die Bewegungen einer menschlichen Hand nachahmt. Dies wird durch Potentiometer und Servomotoren gesteuert.

Mit CAD-Software werden die Gelenke detaliert modeliert und auf ihre Funktionität überprüft. Dabei wird Wert auf eine Kombination und Stabilität und geringerem Gewicht gelegt, um eine fließende Bewegung zu ermöglichen. Nach der Konstrucktion werden die Teile durch Fertigungstechniken wie 3-D-Druck präzise hergestellt. Diese Verfahren sorgen dafür, dass jedes Gelenk genau passt und sich in das Gesamtsystem der Hand/des Fingers einfügt.
Die Bewegungssteuerung sorgt dafür, dass sich die Bionic Hand bewegt. Potentiometer messen die Position der Gelenke und geben diese Informationen an den Mikrocontroller weiter. Dort werden die Werte geprüft und mit den Zielpositionen verglichen. Passt etwas nicht, steuert der Mikrocontroller die Servomotoren an, die die Finger oder Gelenke in die richtige Position bringen. So arbeitet alles zusammen, damit die Hand sich präzise und flüssig bewegen kann.
"To drive fast is like boobs, i like to drive fast"


"Miau"