Marlon Friedl
Sailing without vodka is like a boat without water—pointless 🍸.
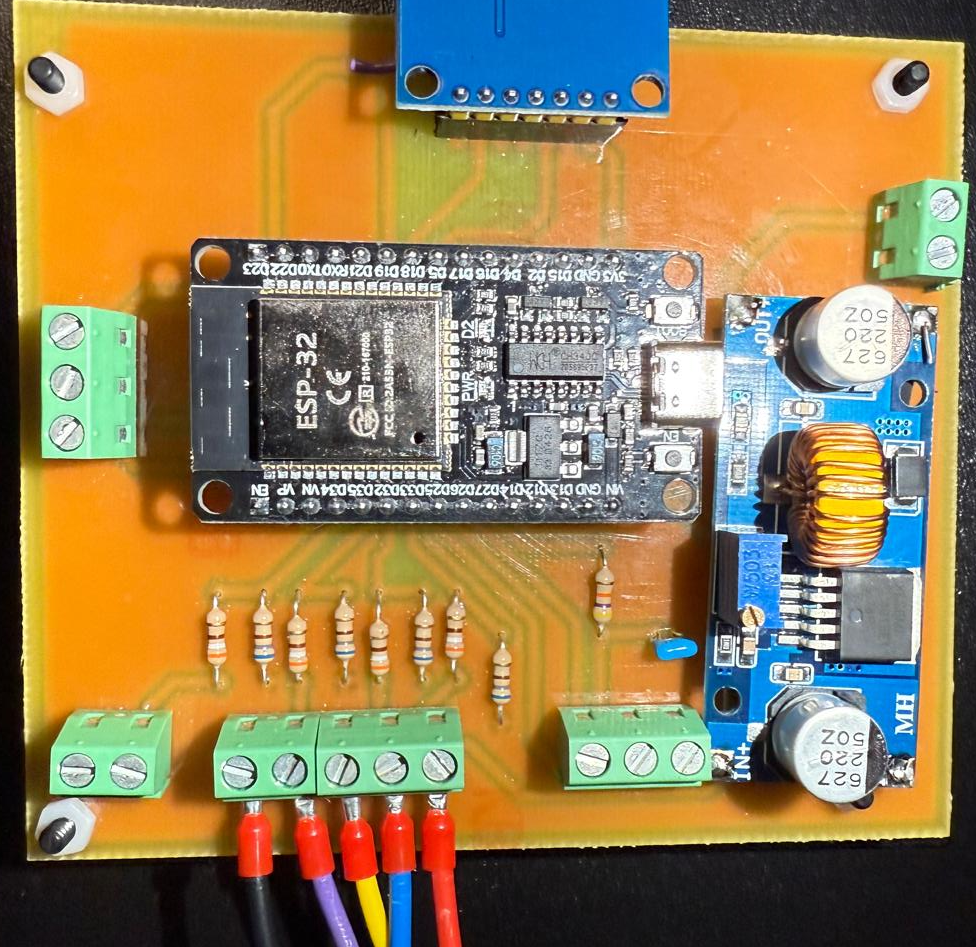
Joystick & Gashebel werden über CAN-Bus und ESP32 mit Curtis-Motorcontrollern verbunden. So richten wir Drehzahl und Drehwinkel der Saildrives auf den Punkt aus – für sichere Manöver im Hafen.

Smartboat entwickelt ein intuitives Steuerungssystem für Freizeitboote. Joystick und Gashebel werden über Mikrocontroller in den CAN-Bus integriert und steuern zwei Saildrive-Motoren so an, dass feine Andockmanöver und seitliche Drift ohne Zusatzantriebe möglich sind. Ziel ist eine benutzerfreundliche Lösung, die die Steuerung vereinfacht und die Sicherheit im Hafen erhöht.

Ein klarer Fokus: einfach zu bedienen, robust im Hafen. Die Architektur verbindet ESP32 (C++) mit Curtis-Controllern (VCL) über einen zuverlässigen CAN-Bus.

Die Diplomarbeit wird an der HTL Mössingerstraße umgesetzt – in Zusammenarbeit mit unserem Wirtschaftspartner.

Sailing without vodka is like a boat without water—pointless 🍸.

Stay blessed never stressed 😌🤙.