
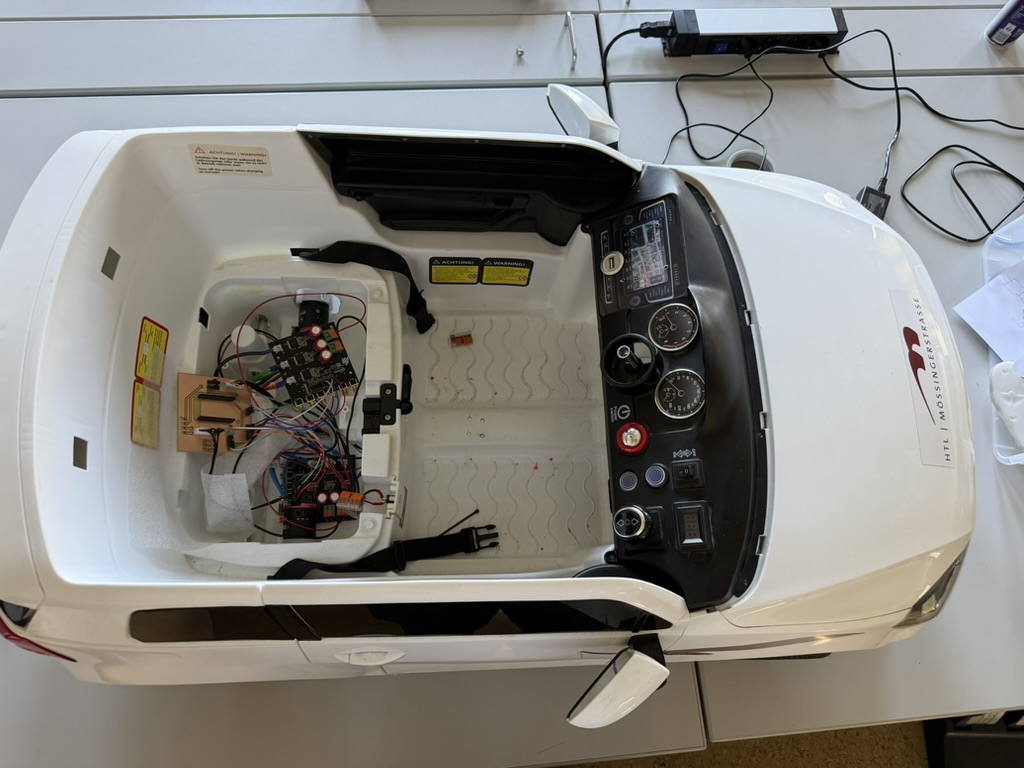
Aufbau
Strukturierter Aufbau des Demonstrators
- Verkabelung
- BLDC-Motoren
- Platinen mit Mikrocontrollern

Herzlich willkommen auf unserer Projektseite.
Auf dieser Homepage erhalten Sie Informationen rund um das Projekt X-by-Wire.
Deutsch In diesem Projekt wird ein X-by-Wire Demonstrator mit dynamischer Lenkwinkel-Anpassung entwickelt, welcher mithilfe von BLDC-Motoren und feldorientierter Regelung implementiert wird. Zudem beinhaltet dieses Projekt die Entwicklung einer Web-App, welche das Fahrverhalten visualisiert.
English This project involves the development of an X-by-Wire demonstrator with dynamic steering angle adaption, which is implemented using BLDC motors and field-oriented control. The project also includes the development of a web app, which visualizes the driving behaviour.
Die Kernkomponenten unseres Projekts – gegliedert nach Verantwortungsbereichen
Strukturierter Aufbau des Demonstrators



Feldorientierte Regelung (FOC) programmieren
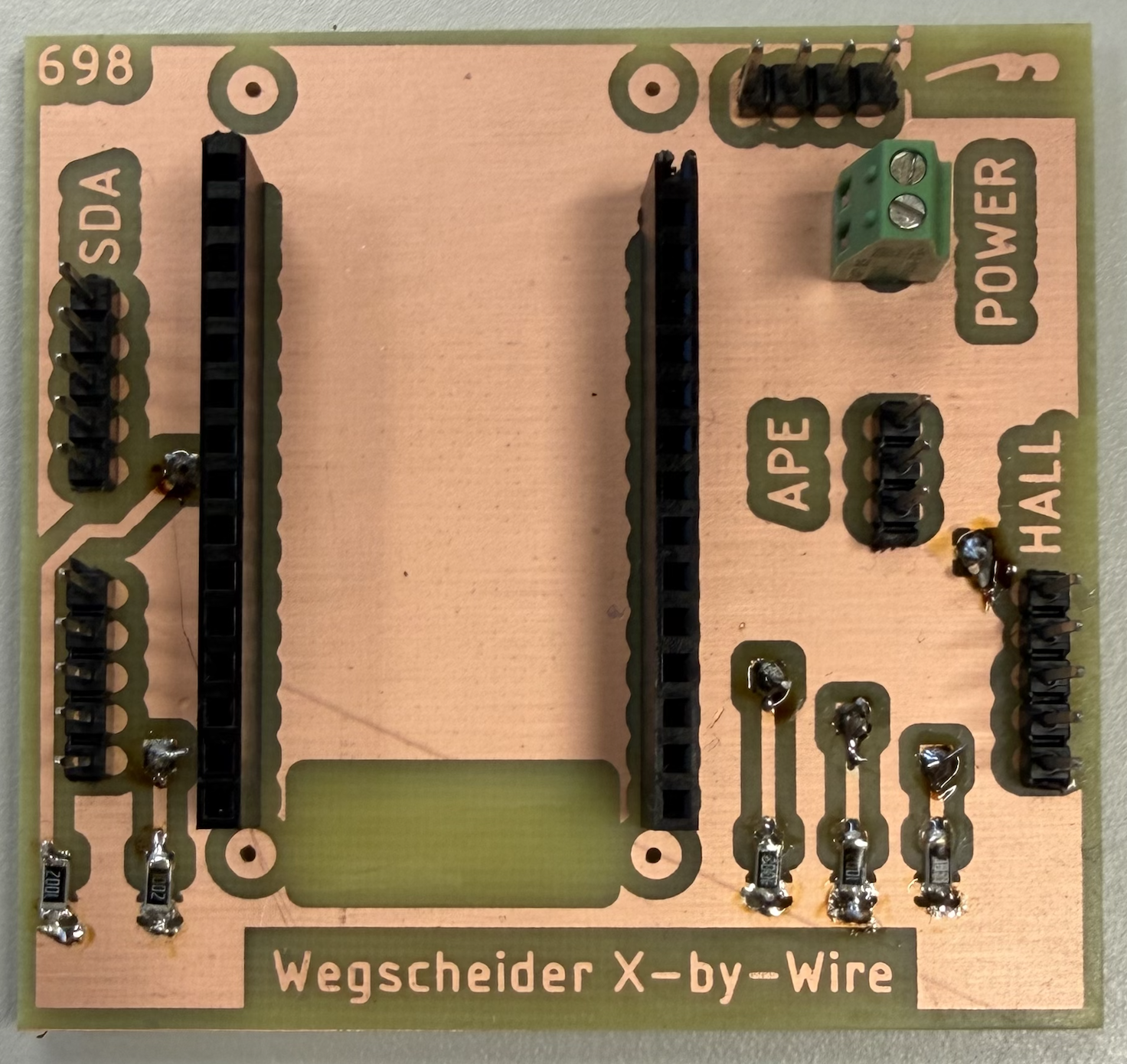
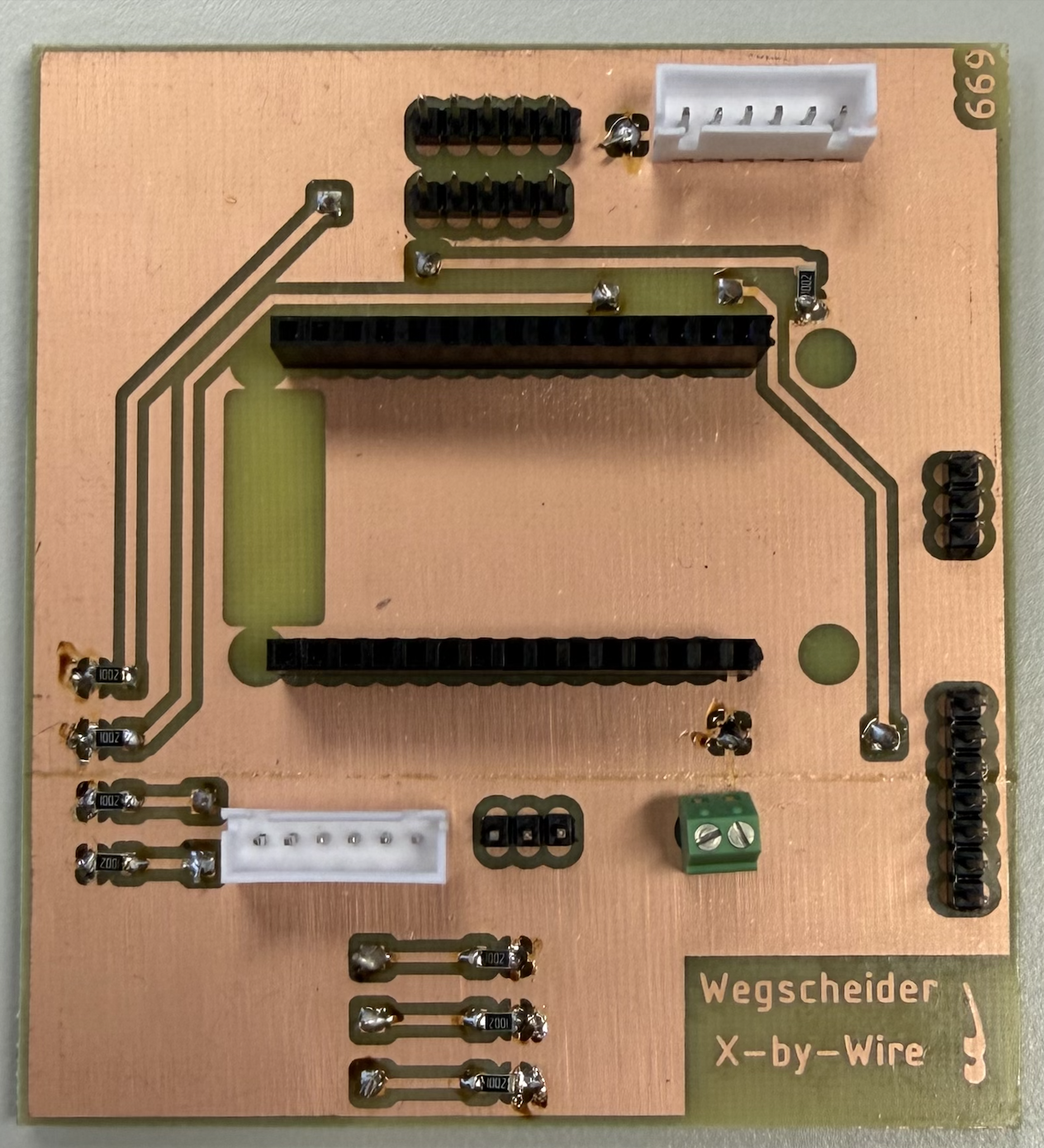
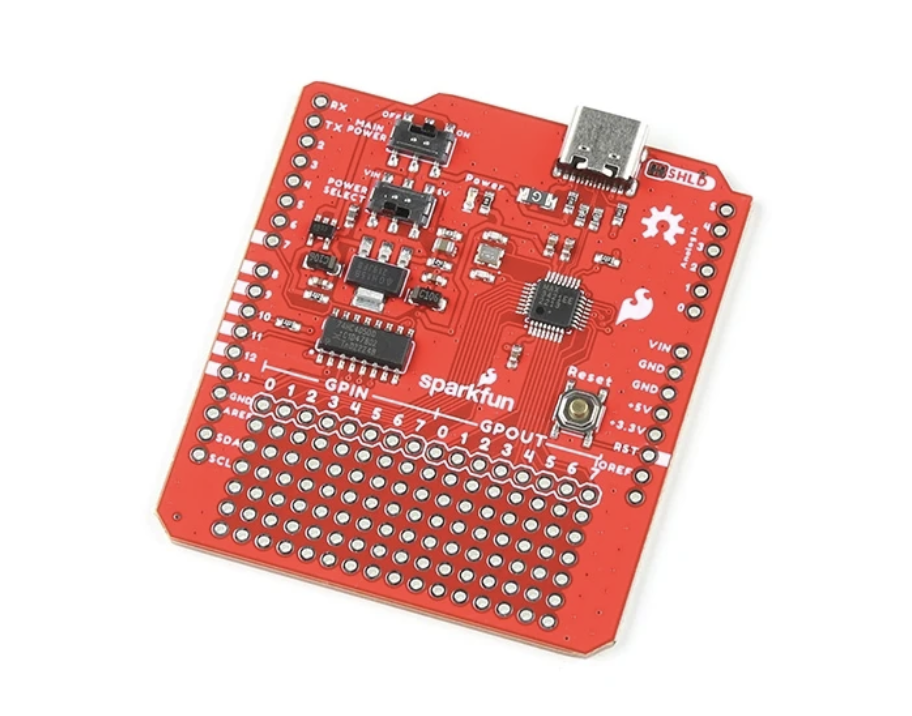
Platinen in Fusion designed

Erfassung der Inputs des Lenkrads, Mikrocontroller Kommunikation, Datenverarbeitung und Weiterleitung der Daten an MQTT
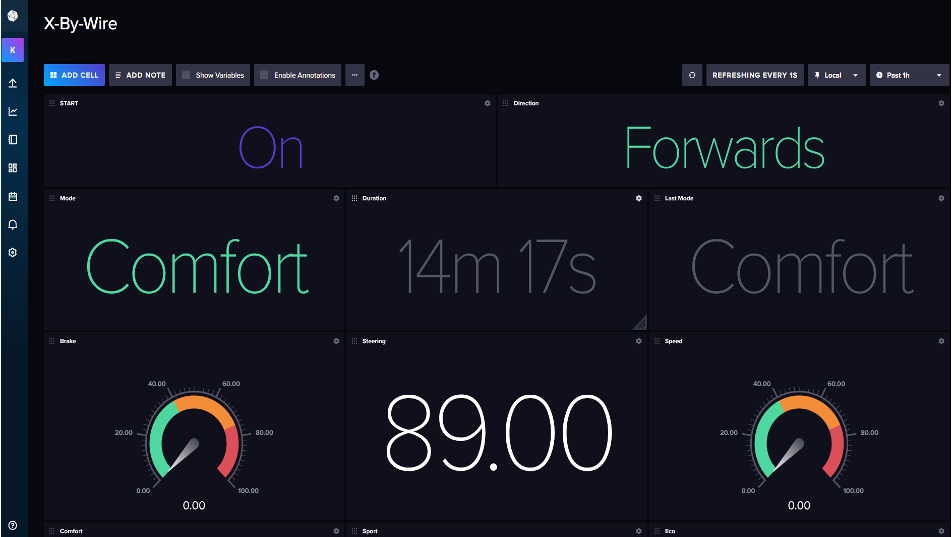


Auswertungen mit InfluxDB und Grafana als Dashboards erstellt
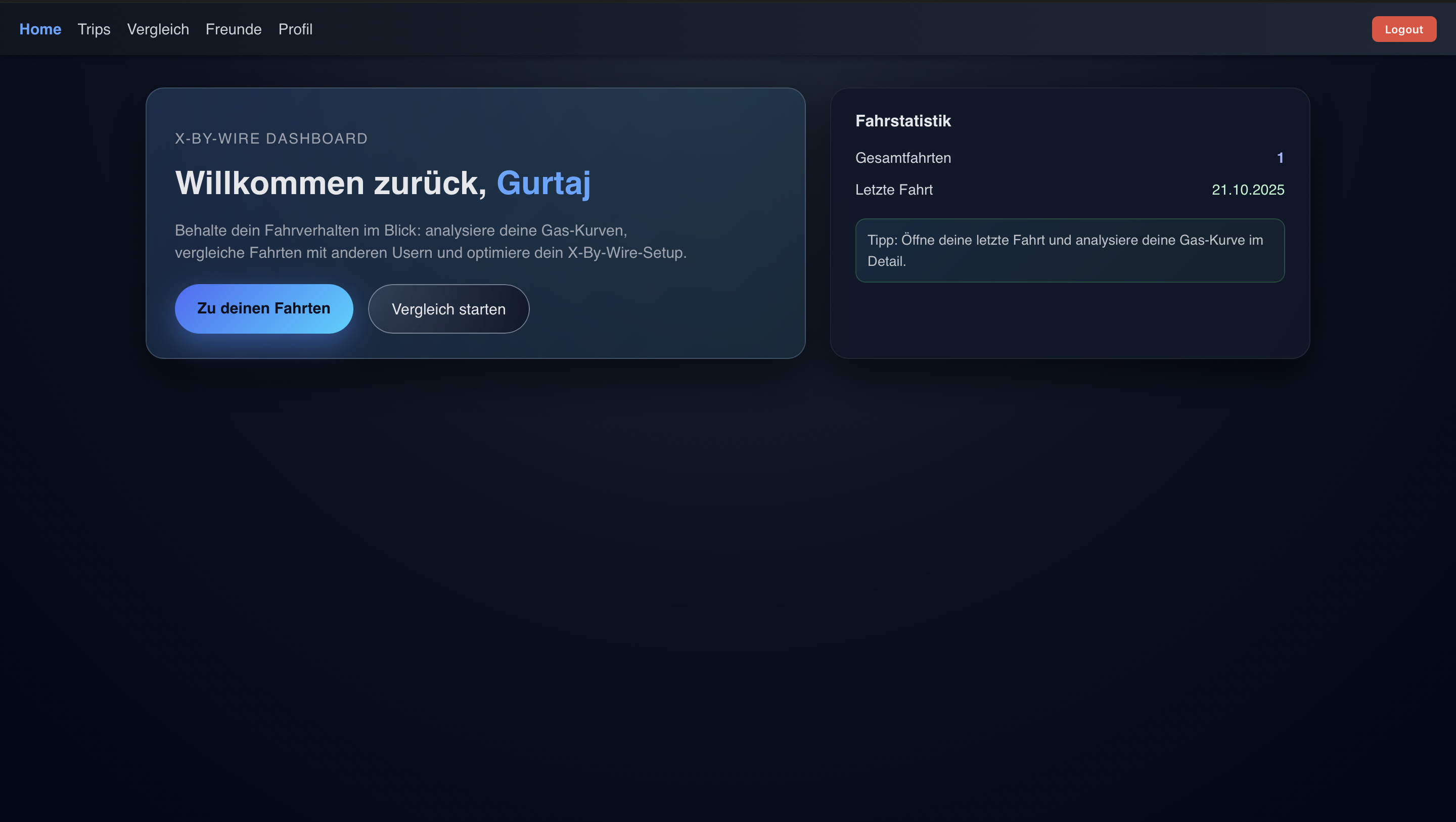

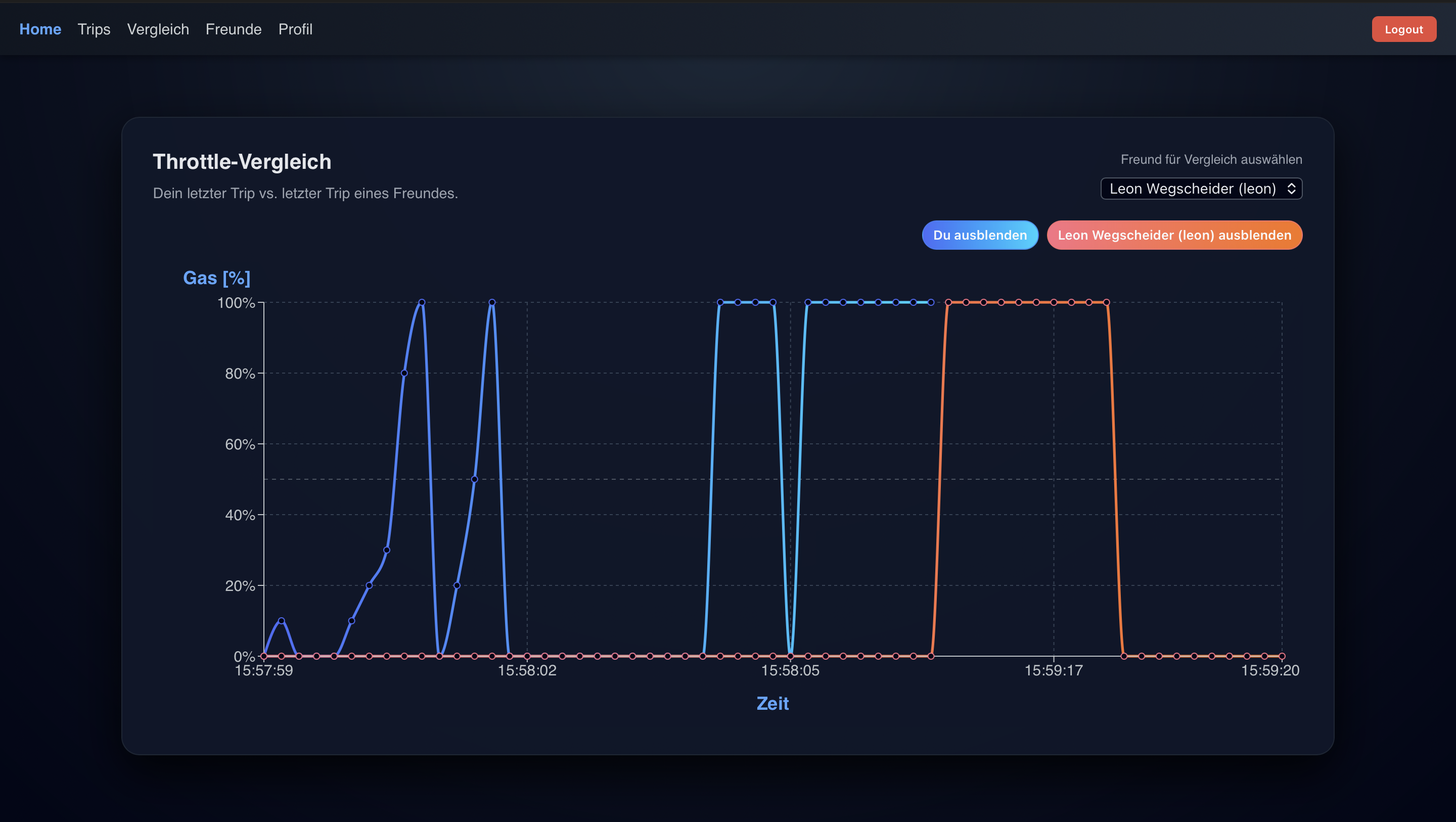
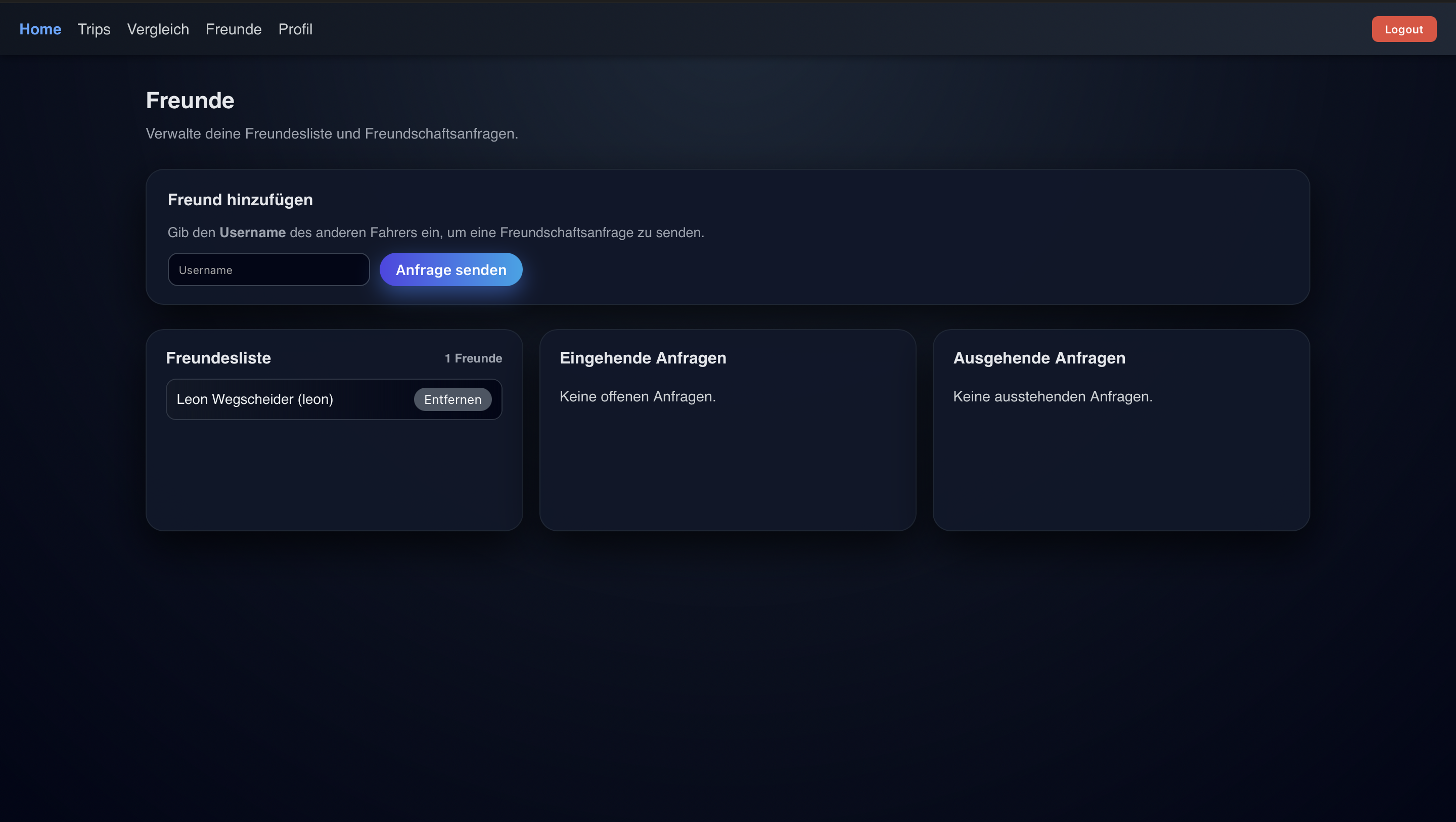
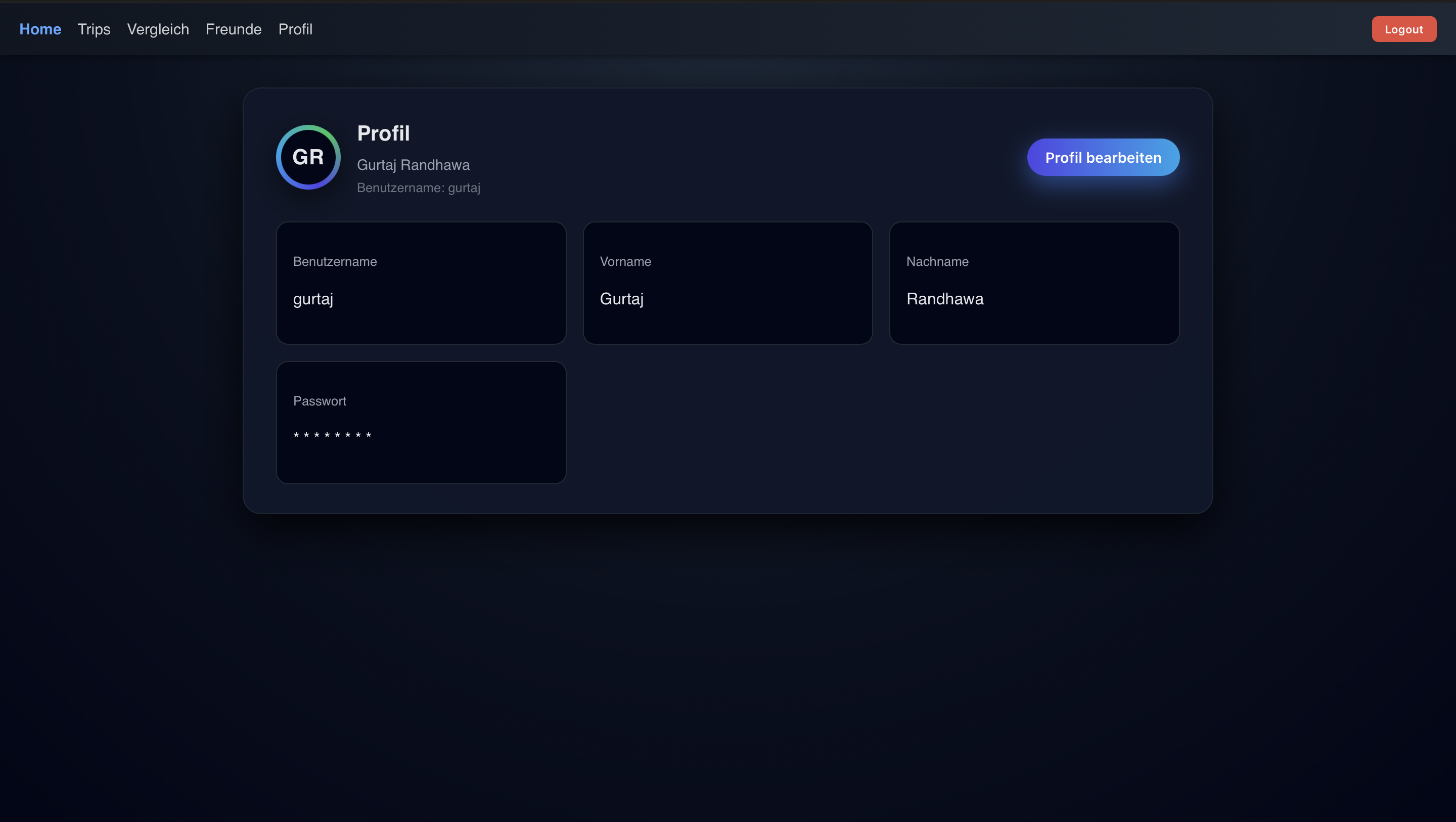
Für die Nutzer eine WebApp entwickelt, damit sie ihr Fahrverhalten analysieren können
Das Team hinter dem Projekt X-by-Wire – Entwicklung, Aufbau und Betreuung des Demonstrators.

Mechanik, BLDC-Antriebe & Aufbau des Demonstrators
Lenkrad-Interface, Visualisierung & Webapplikation

Betreuender Lehrer

Firmenbetreuer (KAI)