Nikolas Roshan
Hardware • Datenaufzeichnung • Systemintegration
Entwicklung und Aufbau des Roboters, Implementierung der Steuerung sowie Erfassung und Speicherung der Bewegungsdaten für die spätere Analyse.
Indoor-Lokalisierungssysteme ermöglichen es, Objekte oder Personen in Innenräumen zuverlässig zu verfolgen. Allerdings ist die tatsächliche Genauigkeit solcher Systeme schwer verlässlich zu bewerten, da bislang ein unabhängiges Referenzsystem fehlt. Bereits kleine Fehler bei der Messung oder in der Koordinatenberechnung können zu deutlichen Abweichungen zwischen der angezeigten und der realen Position führen. Hinzu kommt, dass Positionsdaten aus unterschiedlichen Quellen zunächst korrekt auf dasselbe Koordinatensystem transformiert werden müssen, bevor ein sinnvoller Vergleich möglich ist. Genau diese Umrechnung – die Synchronisation von Ursprung, Orientierung und Maßstab – stellt eine zentrale Herausforderung dar und beeinflusst direkt die Aussagekraft der Messergebnisse.
Um diese Problematik zu lösen, wurde ein mobiler Roboter entwickelt, der präzise und reproduzierbare Bewegungen ausführt und somit als unabhängige Referenzplattform dient. Mit seiner Hilfe können die Messdaten des LoconIQ-Systems objektiv überprüft, miteinander verglichen und bewertet werden. Auf diese Weise lassen sich sowohl die Genauigkeit als auch die Zuverlässigkeit des Systems transparent darstellen und gezielt verbessern. Darüber hinaus ermöglicht der Roboter die Durchführung wiederholbarer Testreihen unter realen Bedingungen, wodurch die Validierung von Indoor-Lokalisierungssystemen deutlich effizienter und belastbarer wird.
Unser Projekt wird bearbeitet und erstellt an der HTL Mössingerstraße
Unser Kooperationspartner: Fa. LoconIQ

„LoconIQ Scout“ ist ein intelligenter Roboter, der entwickelt wurde, um Indoor-Lokalisierungssysteme zu validieren und zu optimieren. Er fährt vordefinierte Strecken selbstständig ab und erfasst dabei kontinuierlich Positionsdaten sowohl seiner eigenen Bewegung als auch jener des LoconIQ-Systems. Die erhobenen Daten werden anschließend analysiert und mit den Referenzwerten verglichen. So entsteht ein präzises Bild der Sensorleistung, das Rückschlüsse auf mögliche Fehlerquellen und Optimierungspotenziale ermöglicht.
1. Schalten Sie den Roboter ein und verbinden Sie ihn über die Benutzeroberfläche mit dem LoconIQ-System, wodurch die Datenerfassung gestartet und alle Sensoren aktiviert werden.
2. Wählen Sie eine vordefinierte Teststrecke (z. B. Kreis- oder Linienfahrt) oder nutzen Sie die Map-Navigation, bei der ein oder mehrere Zielpunkte autonom angefahren werden können.
3. Während der Fahrt erfasst der Roboter kontinuierlich Positionsdaten; zusätzlich können Sie die integrierte Kamera zur Überwachung des Fahrverlaufs verwenden.
4. Nach Abschluss der Bewegung werden alle erfassten Daten analysiert und grafisch dargestellt.
5. Die Abweichungen zwischen den Sensordaten und der tatsächlichen Bewegung werden automatisch berechnet und dienen zur Bewertung der Systemgenauigkeit.
6. Mittels dieser Analyse kann die Genauigkeit des LoconIQ-Systems gezielt verbessert werden.
Das mechanische Design des LoconIQ Scout wurde speziell für präzise Bewegungsabläufe entwickelt.
Die Gehäuseteile sind für den 3D-Druck optimiert und ermöglichen einfache Anpassungen.
Ziel ist eine stabile und reproduzierbare Fahrplattform, die als verlässliche Referenz für die
Genauigkeitsbewertung von Indoor-Lokalisierungssystemen dient.
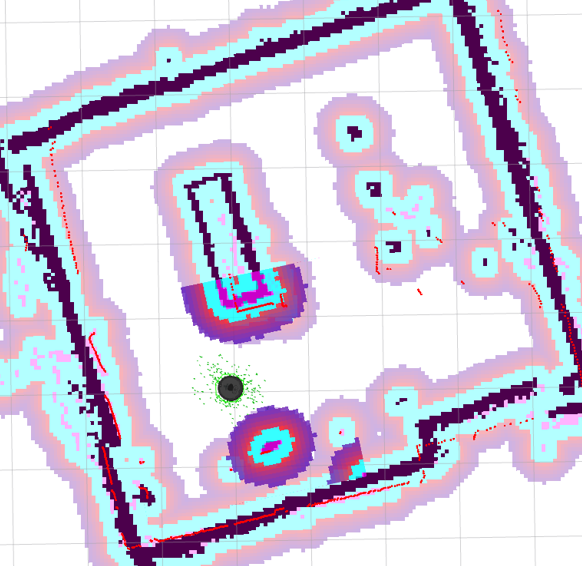
Der TurtleBot lässt sich dank integrierter Map-Navigation vollständig autonom bewegen. Nachdem die Umgebung – etwa ein Büro – mithilfe des LiDAR-Sensors eingescannt wurde, entsteht eine präzise Karte, auf deren Basis Navigationsziele gesetzt werden können. Der Roboter plant anschließend selbstständig den optimalen Weg, weicht Hindernissen aus und fährt zuverlässig zu den gewählten Positionen. Diese autonome Navigationsfähigkeit macht ihn zu einem vielseitigen Werkzeug für Forschung und reproduzierbare Testabläufe in Innenräumen.
Über die Benutzeroberfläche lassen sich Roboterfahrten starten, stoppen und überwachen. Positionen werden live angezeigt und nach Abschluss grafisch ausgewertet. Das System ermöglicht den Vergleich und Export von Messungen. Die Anwendung läuft stabil unter Linux, ist auf intuitive Bedienbarkeit ausgelegt und unterstützt einen effizienten Arbeitsablauf auch bei längeren Testreihen. Zusätzlich erlaubt die Oberfläche die einfache Verwaltung mehrerer Roboter und Testkonfigurationen, sodass komplexe Versuchsreihen komfortabel organisiert werden können.

Das Backend analysiert alle aufgezeichneten Positionsdaten umfassend. Ein leistungsfähiger Algorithmus vergleicht die realen Bewegungen mit den Sensordaten und berechnet dabei Abweichungen, präzise Bewegungskurven sowie wichtige statistische Kennzahlen. Die Ergebnisse werden gespeichert, übersichtlich aufbereitet und können direkt zur gezielten Optimierung des Lokalisierungssystems genutzt werden. Dadurch lassen sich sowohl die Genauigkeit als auch die Zuverlässigkeit der Messungen nachhaltig verbessern und für zukünftige Testreihen dokumentieren.

Entwicklung und Aufbau des Roboters, Implementierung der Steuerung sowie Erfassung und Speicherung der Bewegungsdaten für die spätere Analyse.

Entwicklung des Navigationssystems, Erstellung der Kartenumgebung sowie statistische Auswertung der Positionsdaten zur Genauigkeitsbewertung.

Projektbetreuer

Firmenansprechpartner

Firmenansprechpartner