G.O.S
Die Unterwasserwelt unserer Seen ist für die freiwilligen Taucher der Österreichischen Wasserrettung sehr gefährlich. Das Sonnenlicht dringt nur bis in eine Tiefe von 10-12 Meter vor. Unter dieser Grenze ist das Wasser zwar klar, aber kalt und stockfinster. Ab einer Tiefe von 40- 50 Meter sind Tauchgänge fast nicht mehr durchführbar. Daher haben wir uns entschlossen, mit dem Landesverband Kärnten der österreichischen Wasserrettung, eine Tauchkamera zu entwickeln. Diese Tauchkamera ist speziell für die Bedürfnisse der österreichischen Wasserrettung konzipiert und gebaut worden. Damit ist gemeint, dass wir diese Tauchkamera nicht nur auf den tiefsten See Kärntens ausgelegt haben (dieser wäre der Millstättersee mit einer Tiefe von 140 Meter), sondern auch, da es von einem Boot nachgezogen wird, an die Gegebenheiten der verschiedenen Boote der Wasserrettung. Dieses Projekt ist modular aufgebaut. Es ist in drei Hauptteile gegliedert. Laptop, Steuerung und Kamera. Der Laptop ist in einem Aluminiumkoffer an Bord des Bootes. Die Steuerung und die Kamera befinden sich in zwei verschiedenen Gehäusen. Dies hat den Vorteil, dass es leicht erweiterbar ist, und die Instandhaltung erleichtert. Um den mechanischen Schutz zu gewährleisten wurden Steuerungs- und Kameragehäuse auf einen Schlitten befestigt. Dies hat den enormen Vorteil, dass man dieses Projekt in der Zukunft erweiter und verbessern kann. Da herkömmliche Metalle im Wasser zu rosten beginnen, wurden die Gehäuse und der Schlitten aus Edelstahl gefertigt. Da man nie wissen kann wie klar das Wasser in solchen Tiefen ist haben wir diese Kamera mit einem dimmbaren Beleuchtungssystem ausgestattet. Gedimmt werden hierbei zwei Halogenlampen mit jeweils 50 W Leistung. Dies wurde mit Hilfe von einem Controller realisiert. Die Helligkeit kann jedoch von einem Laptop eingestellt werden. Das Gehäuse besteht aus eloxiertem Aluminium. Die wasserdichte Verbindung zwischen Lampen und dem Steuerungsgehäuse wurde mit einem UV- beständigen Schlauch ermöglicht. Die Datenübertragung erfolgt über das Versorgungskabel. Dies ist mit direct- LAN realisiert worden. Hierbei moduliert der d-LAN Adapter die Daten auf das Versorgungskabel, und demoduliert es am anderen Ende der Leitung.
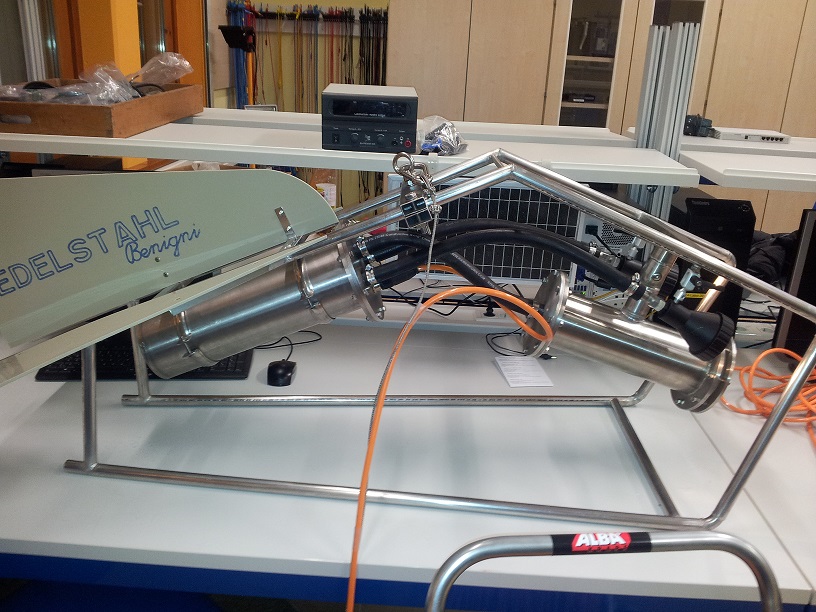
We built an underwatercamera in cooperation with the Austrian Waterrescue. Our camera is dragged by a boat and should be able to reach a depth of approximately 140 m. The power supply is provided by the boat. The data-transmission is realized with D-Lan. The lights are controlled by a µ-controller. With our system the work of the Austrian Waterrescue will be more efficient and secure.
Click to enlarge