Projektfortschritt
Leistungsplatine
Aufbau
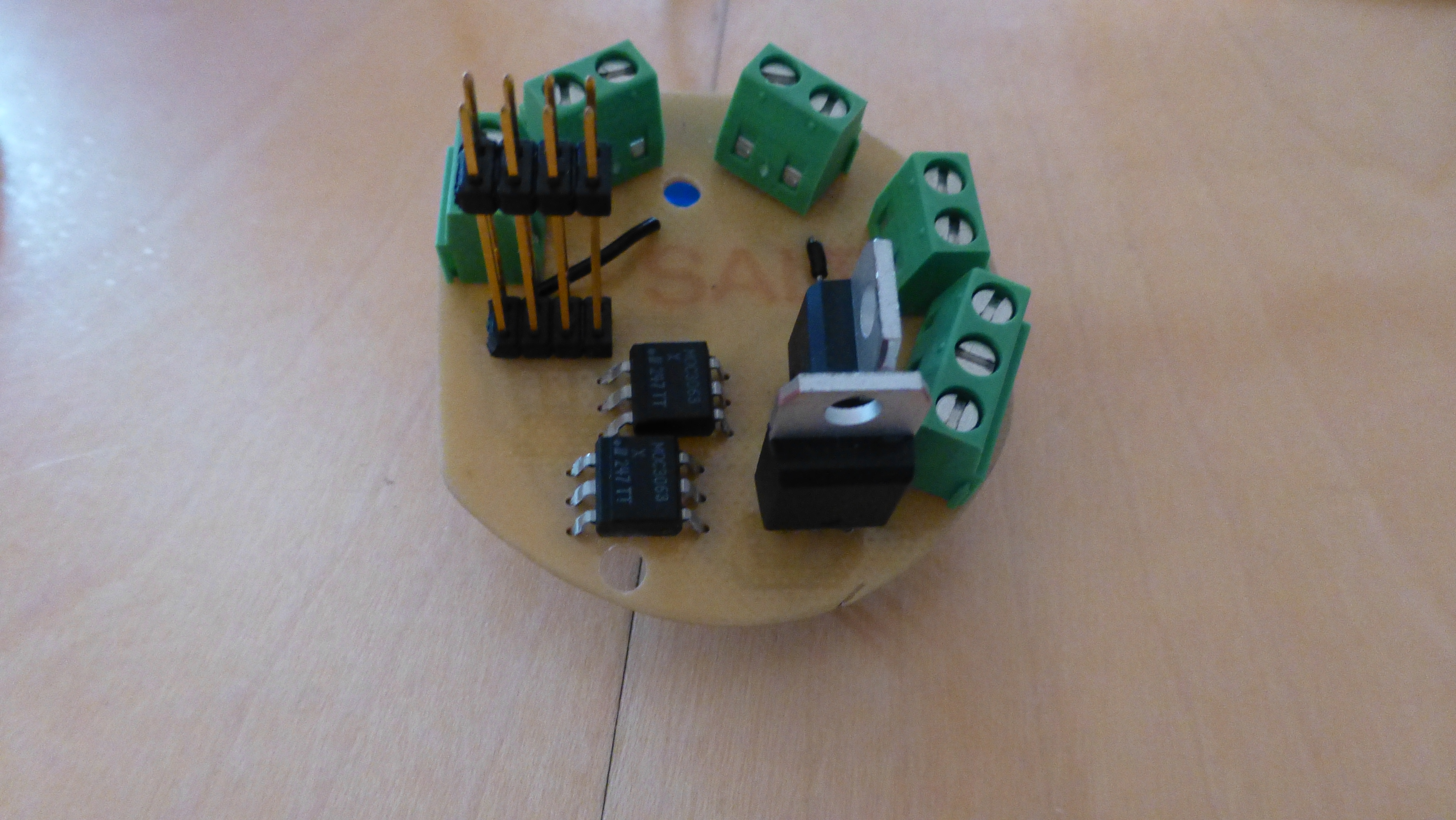
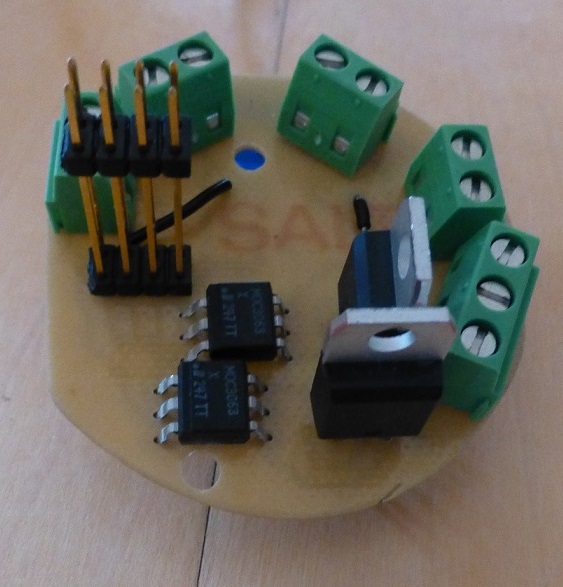
Die Leistungsplatine verfügt über zwei Optokoppler Schaltungen mit denen, je nach Drehrichtung, ein anderer Stromkreis des Jalousimotors geschlossen wird. .
Eine für jede Richtung der Jalousie. Zusätzlich ist Platz für einen Stromsensor vorgesehen, welcher noch hinzugefügt werden kann.
Die Leistungsplatine besitzt folgende Anschlüsse: zwei für den CAN-Bus(CAN-High und CAN-Low), zwei für die 5V Versorgung(+5V und GND), vier
für 230V(L und N Einkommend und Weiterleitung) und drei zum anschließen des Motors. Eine acht polige Steckerleiste dient zur Verbindung zu der Steuerplatine.
Abbildung
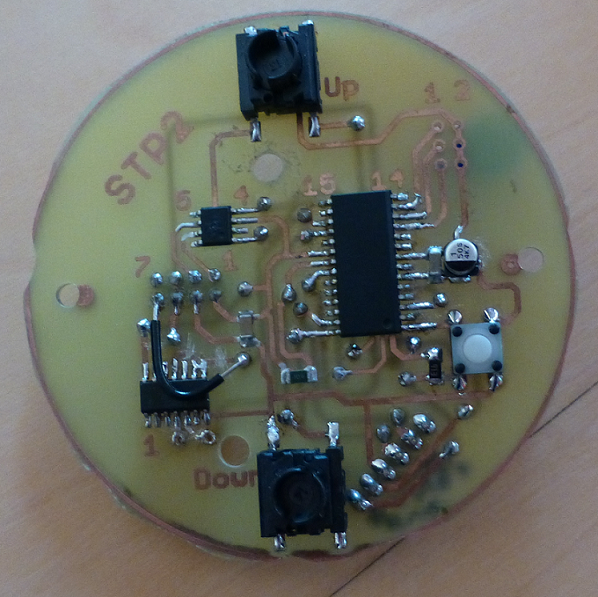
Steuerplatine
Aufbau
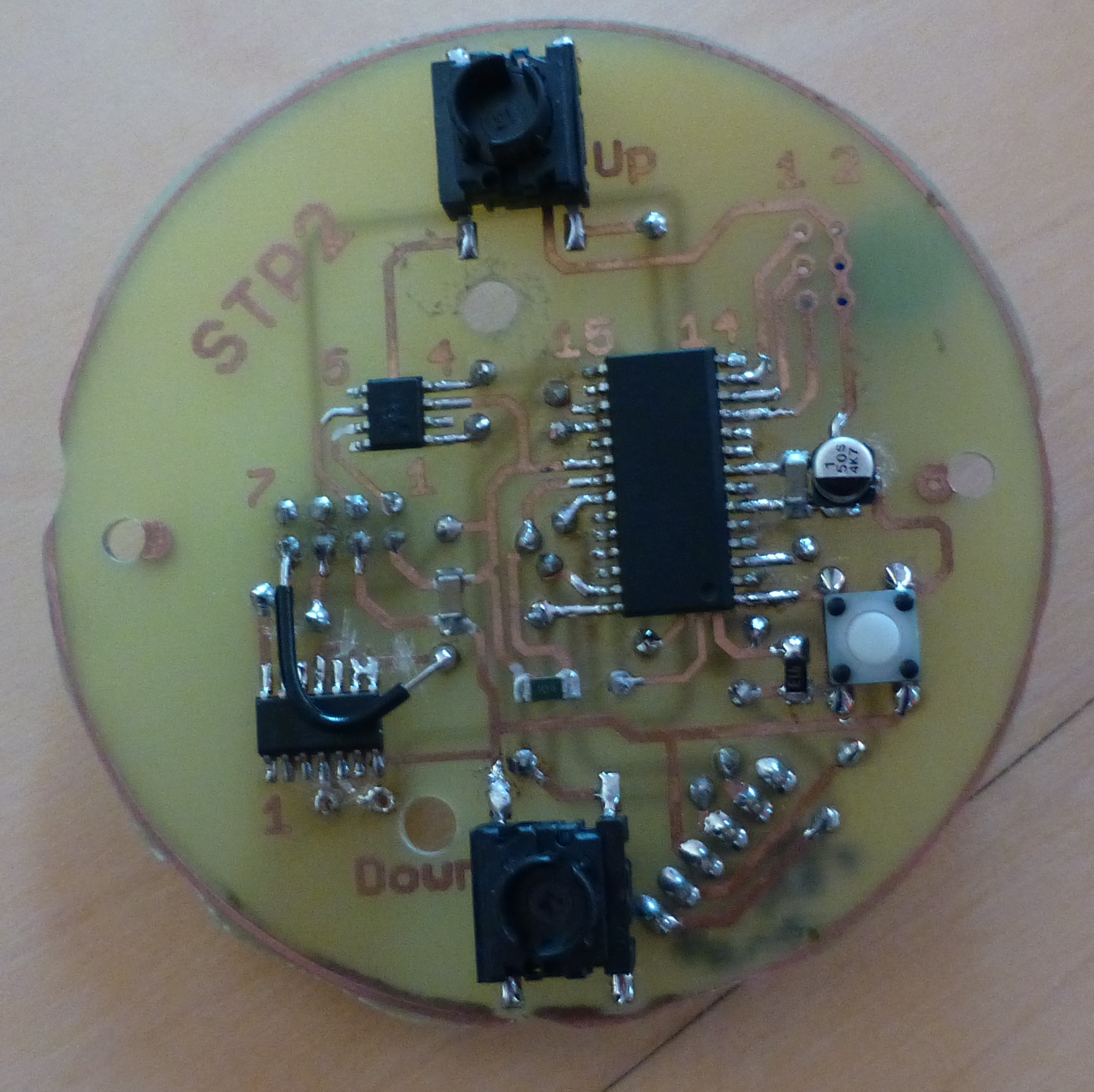
Für die Ansteuerung der Motoren über eine Schaltplatine ist die sogenannte Steuerplatine ferantwortlich.
Auf ihr befinden sich einige Elemente zur manuellen Ansteuerung und ein CAN- Transceiver, der die, über den CAN-Bus übertragenen Befehle,
in geeignete Signale umwandelt. Ein Mikrocontroller verarbeitet die Signale der Bedienelemente und des Transceivers und führt den Schaltvorgang aus.
Auch Sicherungsbauteile und eine Buchsenleiste, zur Verbindung von Steuer- und Schaltplatine, ist vorhanden. Für die manuelle Ansteuerung,
direkt bei der Jalousie, sind zwei Taster an der Platine vorhanden. Die beiden Tasten sind am oberen und unteren Rand der Platine befestigt
und bewirken, bei Betätigung, ein Auf- und Abfahren der Jalousie. Um dies zu ermöglichen, ist jeder Taster mit einem I/O Pin des PICs verbunden
und bewirkt bei einem Tastendruck einen Low Zustand an diesem Pin, was dazu führt das ein Interrupt am PIC ausgelöst wird. Um sicher zu stellen,
dass es nicht möglich ist, beide Richtungen des Motors gleichzeitig anzusteuern, ist eine hardwaretechnische Gerätesicherung integriert.
Bedienung
Die Bedienung geschieht, wie schon erwähnt, über die zwei Taster. Hierbei bewirkt ein kurzer Tastendruck ein
komplettes Öffnen oder Schließen der Jalousie. Dieser Vorgang kann durch einen erneuten kurzen Tastendruck unterbrochen werden.
Wird der Taster allerdings dauerhaft gedrückt, öffnet oder schließt sich die Jalousie solange, bis der Taster wieder losgelassen wird.
Abbildung
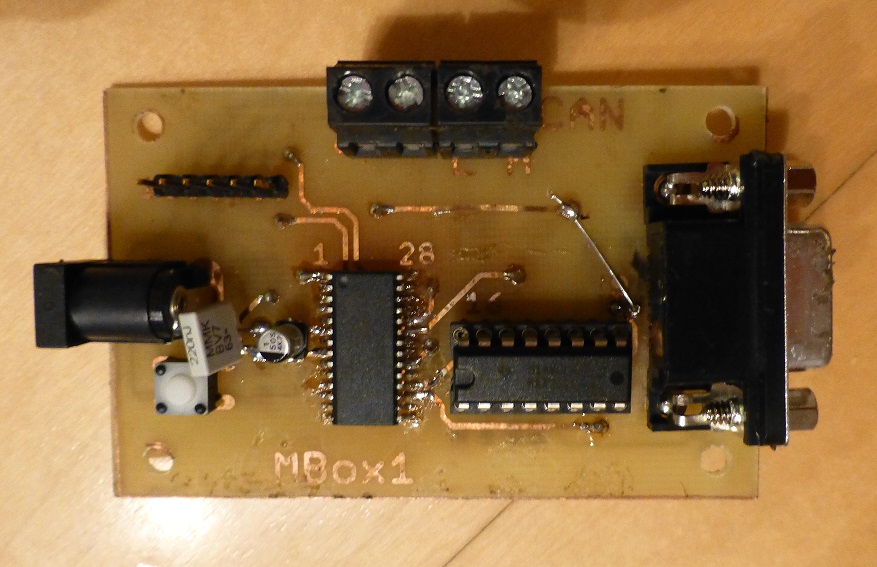
MasterBox
Aufbau
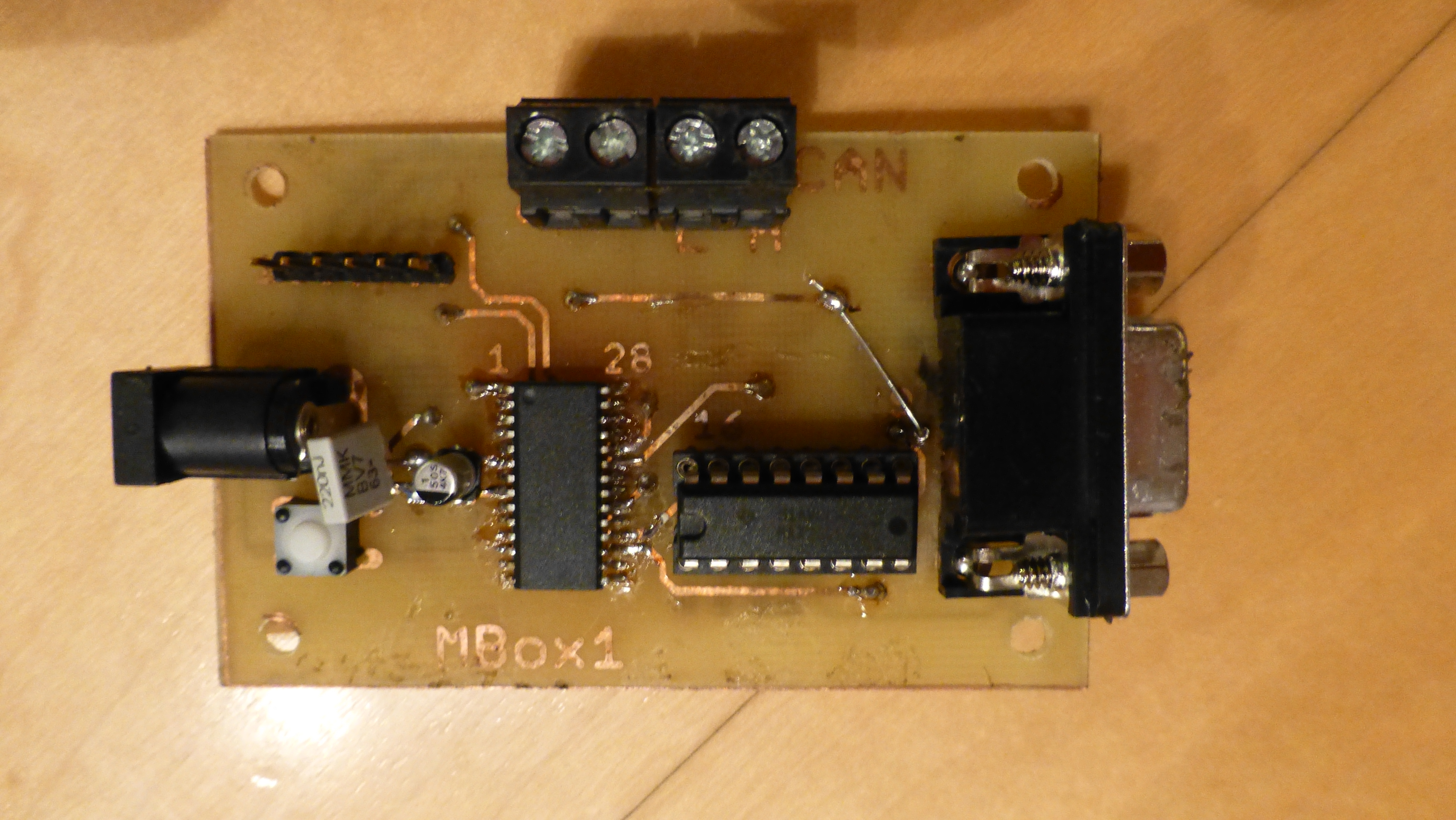
Damit es möglich ist verschiedenen Befehle, über den CAN-Buss, zu verschicken muss eine zentrale Hauptplatine vorhanden sein.
Bei der CAN- Hausautomatisierung ist diese Platine die sogenannte MasterBox, die dafür verantwortlich ist, eingehende Befehle über den
CAN-Bus an die Steuerplatinen weiter zu senden. Um die vom Benutzer eingegebenen Befehle in eine für die Steuerplatinen verständliche Form
umzuwandeln und sie anschließend über den CAN-Bus zu versenden, ist wie auch bei den Empfängern ein PIC18F26K80 und eine CAN- Transceiver vorhanden.
Die Befehle werden über eine serielle Verbindung erhalten. Daher ist ein serieller Stecker für die Verbindung mit einem Eingabegerät benötigt. Für die
Übersetzung wir ein handelsüblicher MAX232 verwendet.
Bedienung
Die zentrale Ansteuerung aller Motoren wird über ein Eingabegerät, das mit der MasterBox verbunden ist,
durchgeführt. Verbinden sie dazu die MasterBox über das serielle Kabel mit, zum Beispiel, einem Computer. Öffnen
sie nun das Hyperterminal oder ein ähnliches Programm, wie zum Beispiel Putty, um darin die einzelnen Befehle einzugeben. Die einzelnen
Befehle werden durch die Eingabe von Zahlen wie 1, 2, oder 3 durchgeführt. Bei einem System mit zwei zu steuernden Jalousimotoren bewirkt
die Eingabe 1 das Öffnen und 2 das Schließen der ersten Jalousie. Die Zahlen 3 und 4 bewirken denselben Effekt bei der zweiten Jalousie, wobei 3
das Öffnen und 4 zum Schließen dient. Um beide Jalousien gleichzeitig zu öffnen, muss die Taste 5 gedrückt werden. Den umgekehrten Effekt, also das
Schließen beider Jalousien, erzielen sie mit einem Druck auf die Taste 6 . Das Drücken der Taste 7 hält alle Jalousien an.
Abbildung
|