Antrieb Version 1.0:


Dieser Antrieb war für unser Vorhaben zu
schwach und wurde somit für unseren 2. Prototyp ausgewechselt.
Antrieb Version 2.0:

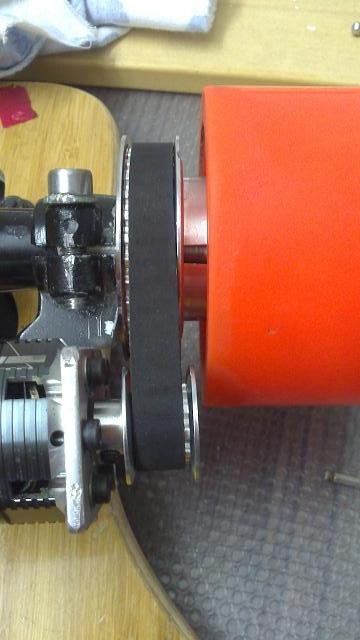
Der verwendete Zahnriemenantrieb besitzt
eine Untersetzung von 3:1, somit ist eine Maximalgeschwindigkeit von
ca. 70km/h ohne Belastung möglich.
Motorbefestigung:

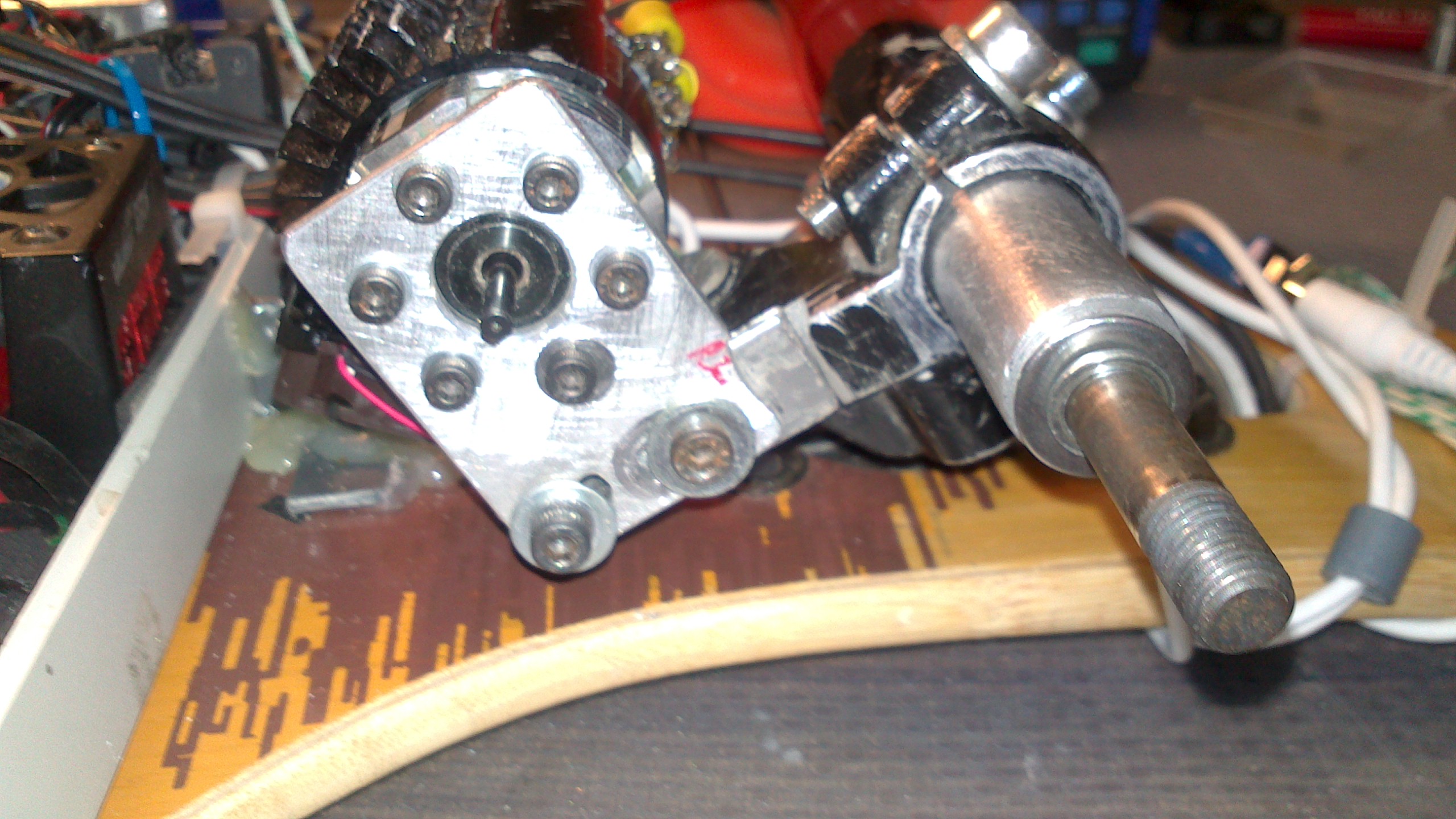
Um das Zahnrad und den Motor anbringen zu können musste, die Achse
im Durchmesser angepasst werden.
Hardware:

Als Grundlage für die Entwicklung unserer Hauptplatine dienten uns
wesentliche Elemente des Entwicklungsboards PIC 18F27J53. Eine
weitere Platine wurde entwickelt um die Wiederstandswerte des an der
Unterseite befestigten Dehnmessstreifens in passende
Spannungssignale umzuwandeln. Als Energiequelle wurde ein
Lithium-Ionenzellen-Akkupack verwendet.
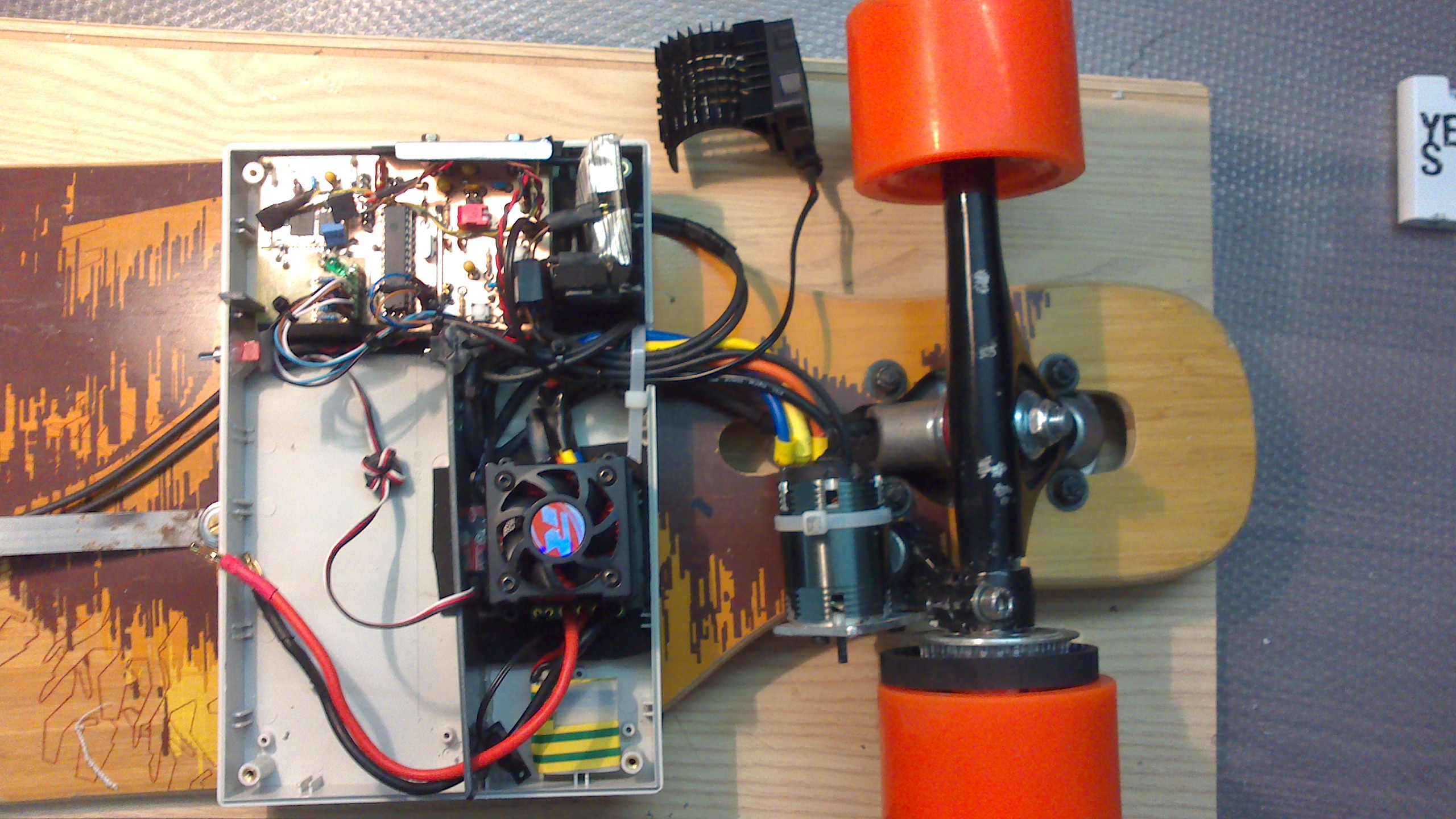
Gehäuse:
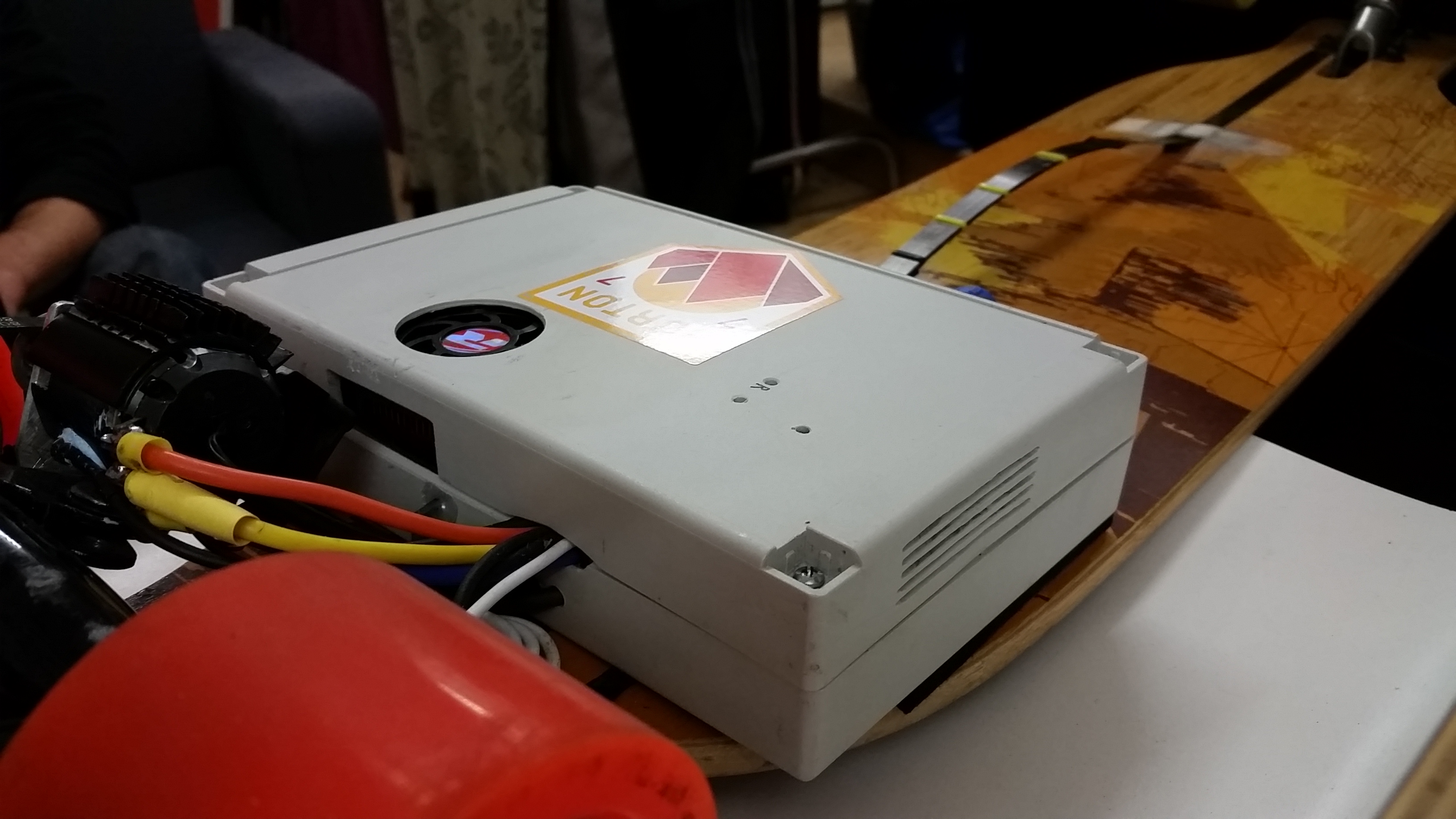
Es ist uns gelungen die gesamte Hardware samt Akkupack und
Motorregler in ein Kunststoffgehäuse mit 220x140x50mm zu verbauen.
Endprodukt:


Video: