ROBOTER MIT SERVOANTRIEB
Herzlich Willkommen auf unserer Projektseite
Ziel ist es einen bestehenden
Linearroboter der Firma Wittmann mit
Schrittmotoren in einen
CNC-Fräsroboter mit Servomotoren umzubauen. Hierzu
ist es erforderlich, dass die jeweiligen Signale für
Takt und Richtung je Achse
(X, Y, Z) , welche von einem bestehenden
PC-CNC-Programm in TTL-Technik ausgegeben
werden, pegelmäßig angepasst und mittels einer S7
1200 CPU für die Ansteuerung der nunmehr
3 Servocontroller bereitgestellt werden.

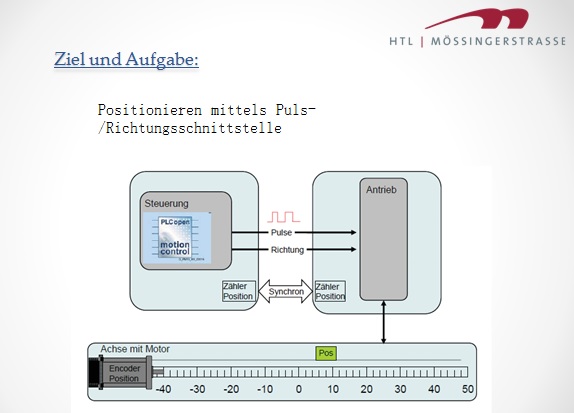
Die Puls-/Richtungsschnittstelle besteht aus zwei Digitalsignalen.
An der Pulsfolge-Schnittstelle steht eine Rechtecksignal zur Verfügung. Das Rechtecksignal hat 50% duty cycle und eine bestimte Zykluszeit. Die Anzahl der Pulse entspricht der Anzahl der Schritte des Servomotors. Ein Schritt des Servomotors entspricht der Winkel 0,36 °.
Die Anzahl der Pulse pro Sekunde bestimt die Geschwindigkeit des Motors.
Die mechanik der Achskonfiguration legt das Verhältnis von Motorschritt zu Verfahrweg fest.