
Die Wissenschaft macht unglaubliche Fortschritte. Mit ihr schreitet auch die Technik weiter voran. Diese Veränderungen sind unbeschreiblich. Vor 100 Jahren Unvorstellbares ist heute alltäglich. Wir sind jedoch noch lange nicht an die Grenzen des Möglichen gestoßen. Die Technik schreitet weiter voran. Heute Unvorstellbares könnte morgen Alltag sein. Von Transportmöglichkeiten bis hin zur Unterhaltung entwickeln wir uns immer weiter. Auch Informationen zu unserem Aufenthaltsort durch Augmented Reality werden immer wichtiger. Äquivalent zu dieser sind die Virtual-Reality-Brillen, durch welche man sich beispielsweise an einen anderen Ort versetzen kann.
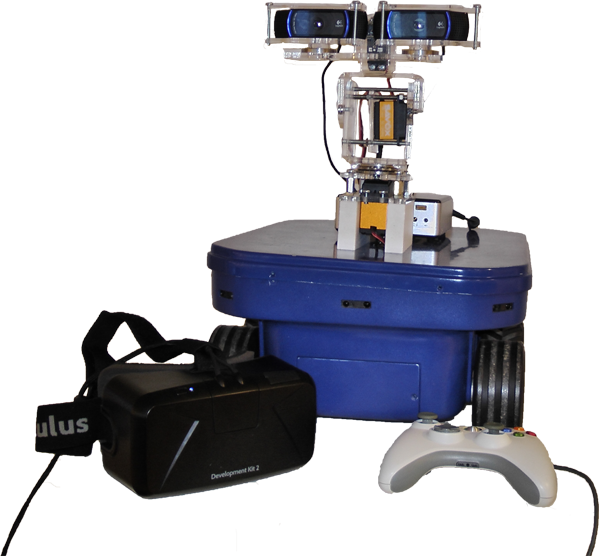
OcuCraft nützt genau dieses Konzept. Durch die Oculus Rift wird das Blickfeld gezielt gesteuert. Den Roboter bewegt man durch einen Game-Controller. So ist es möglich entfernte Orte erleben als ob man wirklich dort wäre.
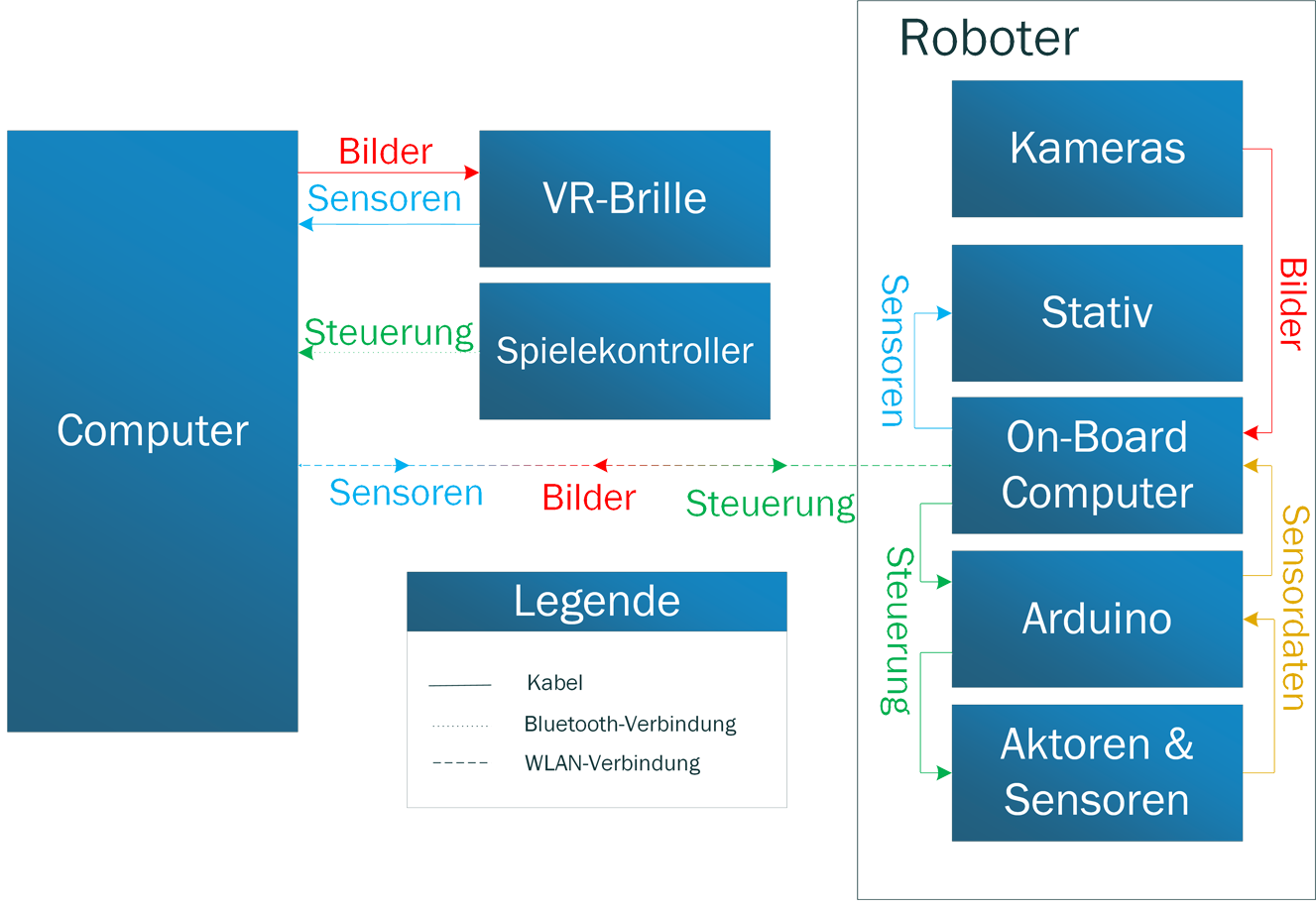
The OcuCraft is a robot which can be controlled with virtual reality glasses and a game controller. It communicates with the main computer via WiFi and therefor it is an independent vehicle. We build a setup for two cameras which can turn the cameras on the three coordinate axis. This setup is able to imitate the movements of a human head. We can use virtual reality glasses to control the camera setup. On the setup are two cameras which video signals are shown on the virtual reality glasses. The setup is mounted on the robot to make it independent and controllable from somewhere else. Normally control units of robots are just to move it or cameras on robots are used to look at things near the robot. In our case the cameras are there to see another location from a habitual perspective.
Die Installation von Videokameras erfüllt meist lediglich den Zweck, dem Benutzer Informationen über den gefilmten Ort zu verschaffen. Die Idee von OcuCraft ist es diesen Zweck zu erweitern und dem Anwender das Gefühl zu geben sich an dem Ort der Kameras zu befinden.


Unser Team beschäftigt sich seit Monaten mit der Entwicklung eines beweglichen Kamerastatives und der Ansteuerung per Virtual-Reality-Brille. Ein Head-Mounted Display besitzt zwei augennahe Bildschirme, die dem Anwender ein 3D-Bild liefern. VR-Brillen hingegen sind eine spezielle Form der HMDs, die zusätzlich die Position des Kopfes bestimmen können. Dadurch ist es möglich, dass das Bild auf Bewegungen des Anwenders reagiert. Eine VR-Brille wird normalerweise für Videospiele verwendet, um dem Spieler das Gefühl zu geben, sich in einer virtuellen Realität zu befinden. In unserem Fall wird jedoch die Realität auf der Virtual-Reality Brille dargestellt. Für diese Anwendung benötigen wir das bewegliche Kamerastativ, welches in der Lage sein muss, die Bewegungen des menschlichen Kopfes zu imitieren. Das bedeutet das Stativ wird auf den drei Koordinatenachsen (X-, Y- und Z-Achse) von Elektromotoren gedreht. Diese Motoren werden von den Sensordaten der VR-Brille, welche die Kopfbewegungen erfassen, angesteuert. Um auf der VR-Brille ein wirkliches 3D-Bild auszugeben, werden auf dem Stativ zwei Kameras angebracht. Im Endeffekt bewegt sich das Blickfeld der beiden Kameras in die Richtung, in die der Träger der VR-Brille seinen Kopf dreht. Um den oben erklärten Stativaufbau mobil zu machen, bringen wir diesen auf einem Fahrzeug an. Am Ende stellt dieses Fahrzeug einen eigenständigen Roboter dar, welcher von einem anderen Ort aus ferngesteuert werden kann. Demnach steuert der Benutzer gleichzeitig sowohl das Stativ mit der Virtual-Reality Brille als auch das Fahrzeug mit einem Spielecontroller.

Die Oculus Rift gehört zu einer der ersten neuartigen Virtual-Reality-Brillen. Eine VR-Brille ist eine spezielle Form eines Head-Mounted-Displays. Im Falle der Oculus Rift ist diese mit Sensoren ausgestattet, die in der Lage sind die Bewegungen des menschlichen Kopfes aufzunehmen. Zusätzlich besitzt sie zwei Bildschirme, die sich vor den Augen befinden und zusammen einen 3D-Effekt unterstützen. Die Oculus Rift wird meistens für Computerspiele verwendet, um sich besser in Situationen einfühlen zu können. Durch die Sensoren und den 3D-Effekt ist eine intuitive Steuerung durch die Kopfbewegungen und eine relativ realitätsnahe Widergabe der virtuellen Welt möglich. Unsere Idee war es diese Eigenschaften zu verwenden um die Realität auf der Brille auszugeben. Statt der virtuellen Welt von Spielen auf der Brille auszugeben, werden zwei Videosignale von Kameras wiedergegeben.
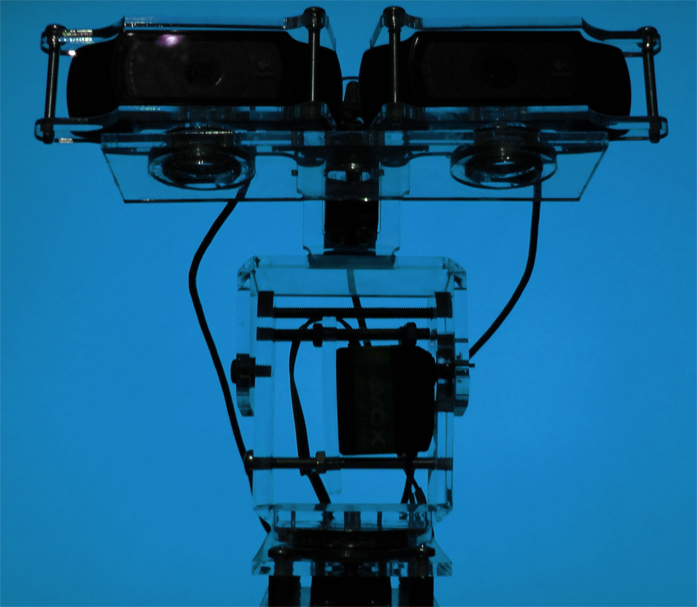
Für unser Konzept, zwei Kamerasignale auf der Oculus Rift auszugeben und diese Kameras gleichzeitig in realitätsnahe Bewegungen des Kopfes zu versetzen, benötigen wir ein Kamerastativ, welches in der Lage ist zwei Kameras auf den drei Koordinatenachsen zu drehen. Dieses Kamerastativ sollte dementsprechend leicht und ausbalanciert konstruiert sein und ebenso sollte es die Bewegungen schnell ausführen können. Wir haben uns dafür entschieden dieses Kamerastativ für zwei Logitech C920 Kameras zu bauen. Die Konstruktion besteht aus Plexiglas, da dieses verhältnismäßig einfach im Haus bearbeitet werden kann. Für die Ausführung der Bewegungen um die drei Koordinatenachsen wurden drei Servomotoren verwendet. Ein vierter Servomotor richtet die beiden Kameras aus, indem er diese um ihre vertikalen Achsen dreht. Erst durch diese Konstruktion wird ein scharfes Bild unabhängig von der Entfernung zum betrachteten Objekt möglich.

Der verwendete Roboter besitzt zwei Gleichstrommotoren, welche den Antrieb des Gefährtes darstellen. Das gesamte elektronische Innenleben wurde von uns selbst geplant und realisiert. So verfügt der Roboter zusätzlich über Drehzahlsensoren für die Geschwindigkeitsmessung, Stromsensoren für die Messung der Akkuladungen und Infrarotsensoren für die Messung von Entfernungen zu Objekten um den Roboter. Zusätzlich muss der Roboter die Spannungen für unser Stativ und dem Mini-PC liefern, der für unsere Anwendung notwendig ist. Das Versorgungs- und Ladesystem des Roboters wurde ebenso selbst entworfen und aufgebaut. Im Zusammenspiel mit dem Stativ lässt sich der Roboter somit als autarken Roboter bezeichnen, der von einem anderen Ort aus gesteuert werden kann. Die Kommunikation für die Übertragung der Steuerdaten, Videosignale uns sonstigen Informationen geschieht über WLAN und kann in Folge dessen ebenso über das Internet erfolgen.

Einige Personen sind aufgrund ihrer Lebenssituation örtlich eingeschränkt. Damit ist gemeint, dass es manchen Personen nicht möglich ist sich an andere Orte zu begeben, sei es aus zeitlichen, finanziellen oder gesundheitlichen Gründen. Zu einem wirklich relevanten Problem wird dies, wenn Menschen aus gesundheitlichen Gründen ihr Zuhause nicht verlassen können. Es gibt sogar Fälle, in denen erkrankte Kinder ihre Ausbildung aus diesem Grund unterbrechen müssen. Mittlerweile wurden Roboter entwickelt, die von diesen Kindern gesteuert werden und sie in der Schule vertreten. Dadurch können Schüler mit monate- oder jahrelangen Erkrankungen ihre Ausbildung ohne Unterbrechung fortsetzen. Für das Wohlbefinden dieses Kindes ist es von Bedeutung, dass diese Roboter gewisse Voraussetzungen erfüllen. Abgesehen von einer leichten Steuerung sollte alles dafür getan werden dem Kind zu erleichtern, sich in die gewohnte Rolle als Schüler zu versetzen und sich trotz der Entfernung als Teil der Gruppe zu fühlen. Die Erweiterung eines solchen Roboters mit unserem Kameraaufbau in Verbindung mit einer Virtual-Reality Brille bietet eine Reihe von bedeutenden Vorteilen für das Kind. Ein essentieller Teil des Projektes ist es, dass die Steuerung des Blickfeldes instinktiv durch die Kopfbewegungen des Kindes erfolgt und somit nicht erlernt werden muss. Weiters sind für die Kommunikation unterbewusste Wahrnehmungen ein elementarer Bestandteil. Bei einem Gespräch mit Lehrern oder Mitschülern ist es von fundamentaler Bedeutung seinem Gesprächspartner in die Augen schauen zu können, welcher diesen Blick auch erwidert. Unser Roboter würde dem Kind rundum bei einem besseren Umgang mit der Situation unterstützen und hilft ihm sein altes Empfinden als Mitschüler wieder zu entfalten.
In der Zukunft könnten Immobilienmakler diese Technik verwenden um einen speziellen Service anzubieten. Heutzutage kann man Wohnungen meist nur auf Bildern erleben, außer man begibt sich direkt an den Ort. Mit dem OcuCraft könnte man sich aus einem Maklerbüro direkt mit dem Roboter verbinden und so aus der Sicht des Roboters die Wohnung erkunden. Somit würde sich sowohl der Makler als auch der Kunde den Weg zur Immobilie sparen. Ebenso könnte ein Bauleiter mit diesem Gerät mehrere seiner Baustellen gleichzeitig beaufsichtigen.

Ein Aufklärungsroboter, der mit unserem Stativ erweitert wird, bietet neue Möglichkeiten. Der Einsatzort wird realitätsnah aufgenommen, wodurch Entscheidungen schneller getroffen werden können, ebenso wird die Umgebung bereits wie gewohnt wahrgenommen, deshalb kann man sich ein besseres Bild des Einsatzes verschaffen.




Das Projekt OcuCraft wurde von folgenden Institutionen unterstützt:

