
Details
Hier finden Sie Information über das Projekt DTC.
Pegelwandler
Der eigens entwickelte Pegelwandler mit dem Baustein MAX232 wandelt das vom PIC erzeugte Signal auf die benötigte Eingangsspannung für den Booster. Sie enthält 5x1uF Elkos, eine RJ11 Buchse, sowie Anschlüsse für die Sensoren.
 |
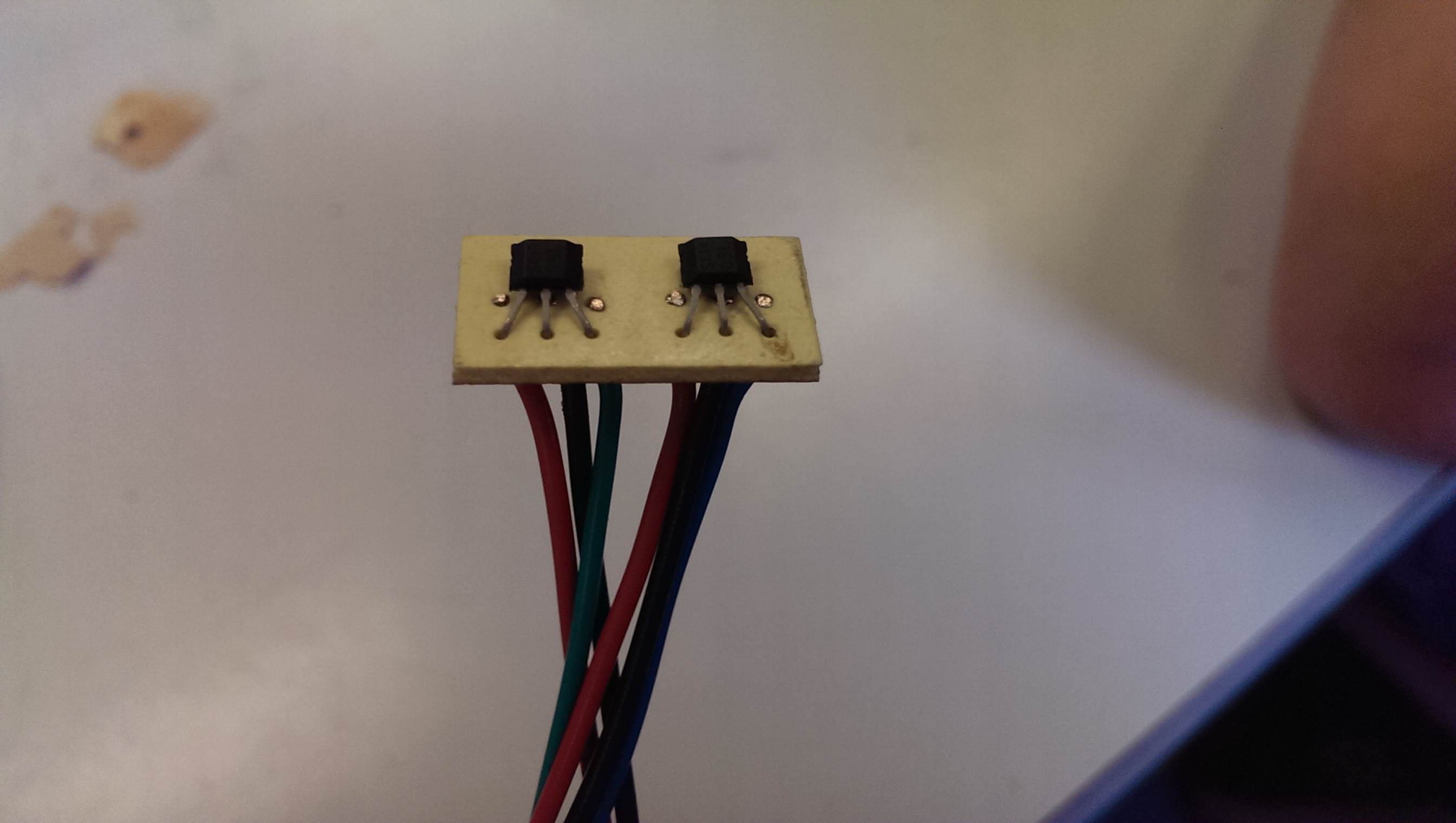
Sensorplatine
Die Sensorplatine beinhaltet einen Hallsensor, einen 10Kiloohm Smd-Widerstand, sowie 3 Anschlüsse für Versorgung, Masse und Ausgang des Sensors. Die Platine wird so unter den Schienen angebracht, dass ein Zug beim vorbeifahren, welcher an der unter Seite Magneten angebracht hat, erkennt werden kann. Durch diese einfache Realisierung sollte eine einfache Zugerkennung möglich sein und es wir unterschieden um welchen Zug es sich handelt und in welcher Richtung er unterwegs ist.
 |
Java-Overfläche
Über die Java-Oberfläche werden die ganzen Züge gesteuert. Nach dem Öffnen muss man sich zuerst mit dem System verbinden indem man auf den Button "Verbinden" drückt und die richtige Schnittstelle auswählt. Als nächstes stellt man die gewünschten Zugparameter, wie mit welchen Zug, ob ein Licht leuchten soll, in welche Richtung er fahren soll und mit welcher Geschwindigkeit man anfangen möchte, ein. Mit dem Button "Senden" übernimmt der PIC die Kontrolle über das System und der Spielspaß kann los gehen. Bei gewünschter anderer Fahrweise einfach die Einstellungen ändern und der PIC übernimmt diese automatisch. Um eventuelle Crashes zu vermeiden wurde ein "NOTAUS" Button bereitgestellt der die Anlage zum erliegen bringt. Bei der Wiederbetätigung dieses Buttons erwacht die Anlage wieder zu leben und die Züge fahren mit den vorherigen Einstellungen weiter. Mit dem "Exit" Button schließt man die Anwendung.
 |
C-Firmware
Die C-Firmware verarbeitet, die von der Java-Oberfläche empfangenen Daten, weiter und gibt sie als richtige Adresse an den Pegelwandler weiter. Die zentrale Steuereinheit übernimmt ein Mikrocontroller mit der Bezeichnung "PIC18F27J53".
Zug mit Magneten
Die zwei Magnet unter dem Zug sind für die verschiedenen Zugnummern zur Erkennung notwendig weil der Hallsensor ein Magnetfeld benötigt um ein Signal ausgeben zu können. Der Unterschied erkennt man mit den Abstand der zwei Magneten voneinander. Je weiter sie voneinander eintfernt sind umso eine höhere Zugnummer hat der Zug.
 |
Komplettes System
Im Bild sehen Sie das komplette System welches den PIC, den Pegelwandler und die Sensorplatinen, sowie die Java-Oberfläche beinhaltet. Hier regelt das Programm bei einer zu hohen Eingangskurvengeschwindigkeit den Zug auf eine eingstellte Geschwindigkeit herunter und beschleunigt nach der Kurve wieder auf die eingestellte Geschwindigkeit. Somit funktioniert das System ganz von alleine, aber es können natürlich auch selbstständige Geschwindigkeitsänderungen eingestellt werden.
|