Hier wird das Projekt möglichst anschaulich dargestellt - d.h. mit Bildern und den entsprechenden Erklärungen.
Prototyp
In den folgenden Bildern wird der erste fertige Prototyp gezeigt.
 |
|  |
|  |
|
|
| |
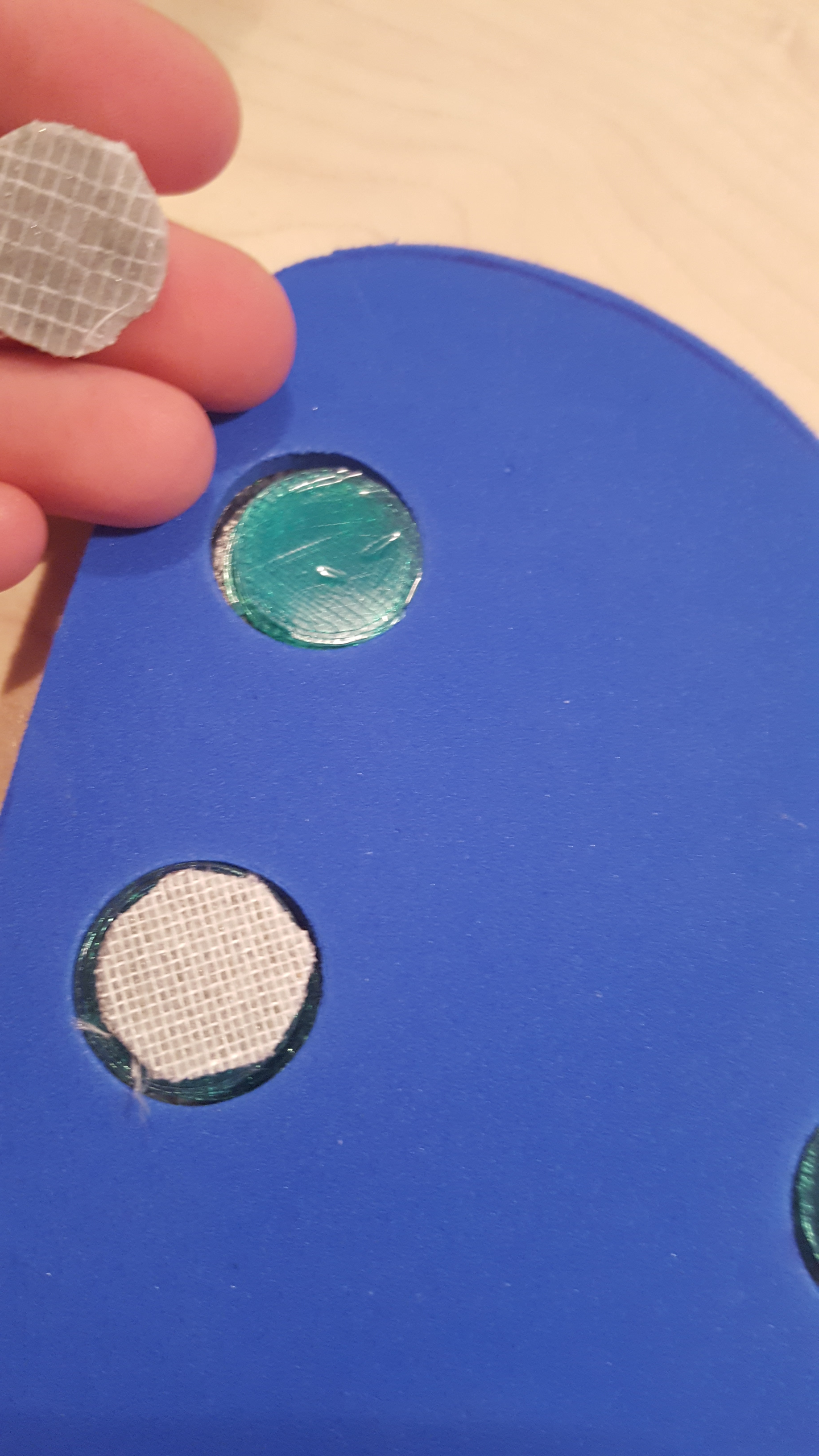
| In diesem Foto werden die Löcher, welche in die Sportsohle gestantzt werden, gezeigt. Weiters kann man den obersten Puck sehen (grün), welcher von oben auf den Kraftsensor drückt. |
|
Bilder zum Vergrößern anklicken!
In den oben gezeigten Abbildungen wir der erste fertige Prototyp gezeigt. Bei diesen Prototypen wird die Auswerteschaltung, in einem Gehäuse, auf dem Fußrücken getragen. Die Auswerteschaltung selbst besteht aus einem Arduino- Uno mit einer Huckepackplatine, an welcher die Kraftsensoren angeschlossen werden und sich die Verstärkerschaltung befindet. Die Sohle besteht aus einer Sporteinlagesohle in welche Löcher für die Sensoren gestanzt werden. Anschließend wird auf der Unterseite der Sportsohle eine steife Sohle geklebt. Auf dieser Sohle liegt der ein Puck zu optimalen Kraftübertragung auf. Auf diesen Puck wird der Kraftsensor geklebt und auf diesen noch ein weiter Puck. So wird die Auftrittskraft von oben und unten optimal auf den Kraftsensor übertragen. Anschließend müssen Kanäle für die Sensorleitungen in die Sportsohle geschnitten werden, um ein zu starkes Abknicken der Sensorleitungen zu verhindern. Die Sensorleitungen führen zur Auswerteelektronik am Fußrücken. Auf die Sportsohle wird eine Schicht weicher Gummi, zur Auspolsterung, geklebt. Damit der Patient die Pucks, zur Kraftübertragung, wärent dem Gehen nicht spürt. Über die Gummischicht wird zu guter Letzt ein Stoff mit einem Muster geklebt. Diese Schicht ist anschließend auch im Schuh des Patienten zu sehen.
Sohle
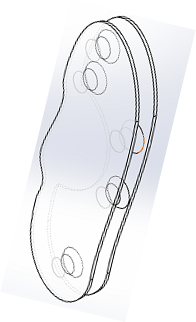
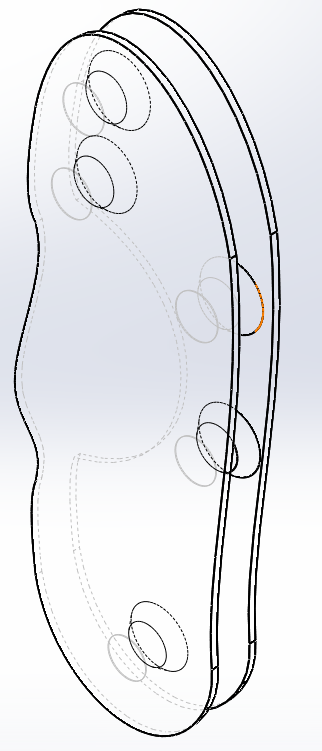
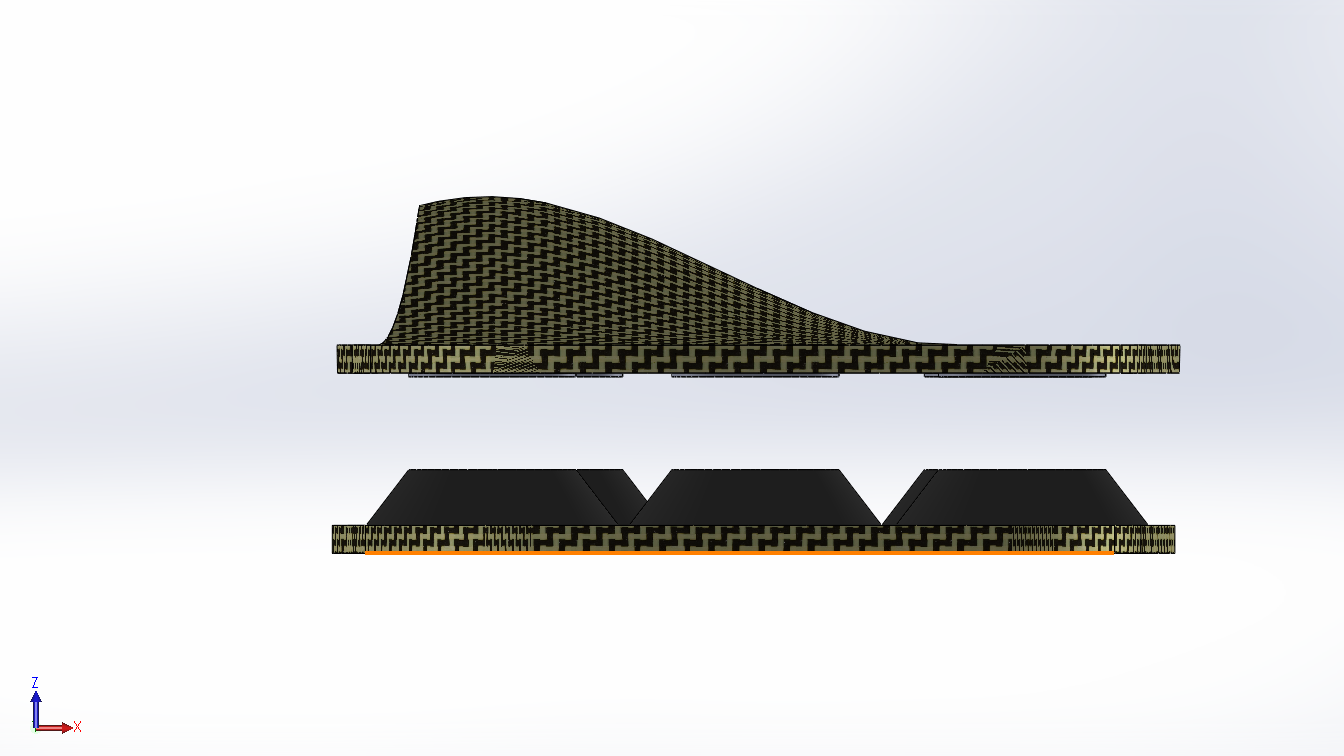
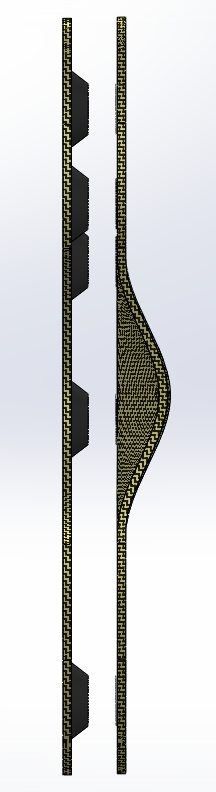
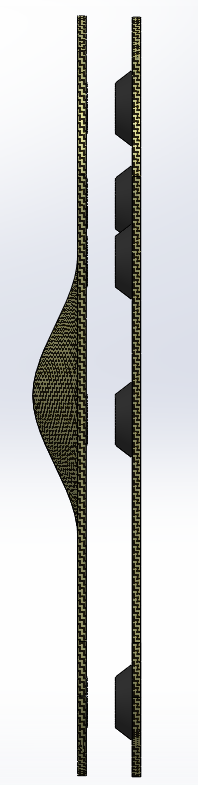
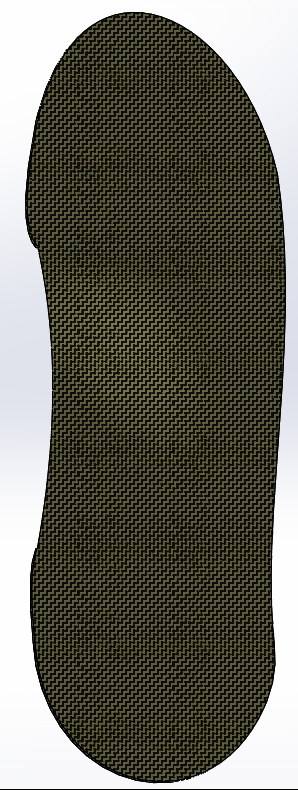
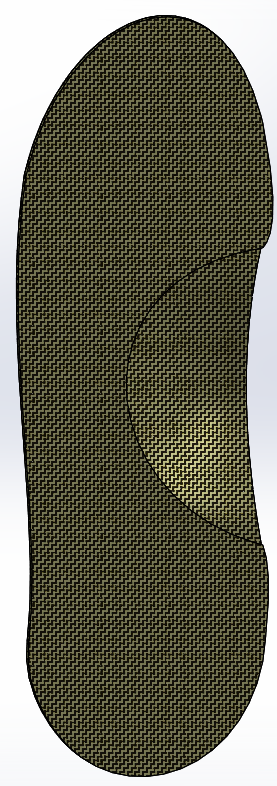
In den folgenden Bildern wird das Design der Sohle anhand einer Solidworks-Zeichnung gezeigt.
Bilder zum Vergrößern anklicken!
Die Sohle besteht aus zwei Sohlen, einer Sohle oben und einer unten.
Die Obere ist eine ganz normale Einlagesohle und auch die entsprechende Form. Die Untere hingegen
hat keine Wölbung, da diese weggeschnitten wird. So erhält man ausreichend platz dür die Elektrinik,
welche dort untergebracht ist. Die schwarzen Stempel welche zwischen den Sohlen zu sehen sind, sind
sogenannte Pucks und und dienen sowie die untere Sohle zur optimalen Kraftübertragung auf die Sensoren.
Messvorrichtung
Die im Video zu sehende Messvorrichtung dient zur Kalibrierung des Sensors. Mit Hilfe eines Fingerkraftmessgerätes wird die Spannungskurve des FlexiForce Sensors, mit einem sich ändernden Gewicht, am Hebel, gemessen. Dabei wird das Fingerkraftmessgerät in die Messvorrichtung gespannt und anschließend über den Hebel das gewünschte Gewicht eingestellt. Als nächster Schritt wird das Fingerkraftmessgerät wieder entfernt und der FlexiForce Sensor eingelegt, auf welchem nun das zuvor eingestellte Gewicht lastet. Dabei muss jedoch auf die Höhendifferent, welche durch die unterschiedlichen Höhen des FlexiForce Sensors und des Fingerkraftmessgerätes entsteht, geachtet werden. Da sich durch diese Differenz der Winkel des Hebels verändert und somit auch die auf den Sensor wirkende Kraft. Um diesen Fehler zu beheben muss, die Winkeldifferenz und anschließend mit Hilfe des Kosinus aus der Winkeldifferenz die neue Hebellänge berechnet werden. Nun muss diese von der ursprünglichen Hebellänge abgezogen werden, umso die Längendifferenz der beiden zu erhalten. Anschließend muss, wenn sich die Vorrichtung in der 90° Position befindet, das Gewicht um genau diese Längendifferenz in Richtung Drehpunkt verschoben werden. Durch diese Positionsänderung des Gewichtes, erhält man dieselbe Kraft am Sensor welche auch in der 104° Position wirkt.
Mit dieser Methode des Messens wird eine Messtabelle des Sensorverhaltens erstellt. In dieser Tabelle werden das Gewicht in 5kg Schritten und die dazu gemessene Wert des Arduinos eingetragen. Zusätzlich wird mit einem Multimeter die jeweilige Ausgangsspannung gemessen.
Durch die Messung wird zu jedem benötigten Gewicht der passende Arduino Wert gemessen, was das Schreiben des passenden Programmes zur Auswertung der Sensoren, welches beim Überschreiten des Grenzgewichtes Alarm schlägt, erleichtert. Da zu jedem Grenzwert der passende Arduino- Wert bekannt ist und so das nichtlineare Verhalten des FlexiForce Sensors, bei der Weiterverarbeitung und Auswertung des Sensorsignales ignoriert werden kann. Diese Tatsache verringert den programmtechnischen-, schaltungstechnischen und rechnerischen Aufwand enorm
.