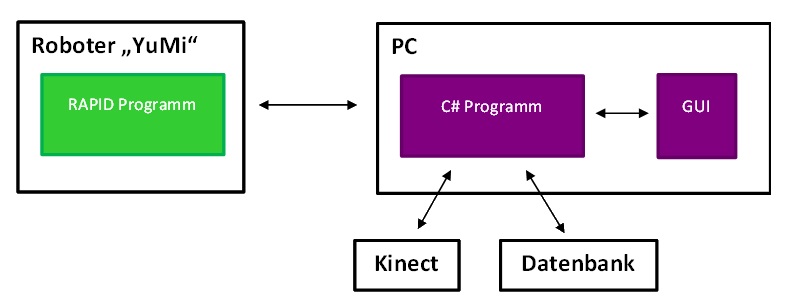
Das Projekt ist in vier Hauptkomponenten aufgeteilt:
1.) Roboter mit RAPID Programm und dessen Ansteuerung
2.) Auswertung der Kinect
3.) Grafische Benutzeroberfläche
4.) Datenbank zum Speichern der Ergebnisse
Das folgende Blockschaltbild zeigt alle Komponenten des Projekts auf:
Das Konzept, mittels Gestensteuerung die Bewegungen des Roboters vorzugeben, ermöglicht eine völlig kontaklose Therapie, ohne unnötige Vorbereitungszeit.
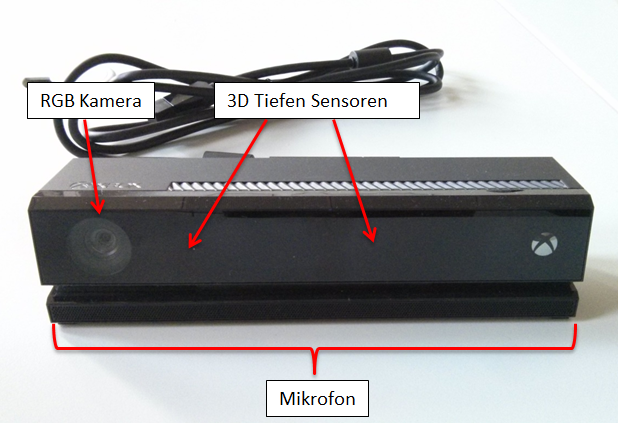
Die Gestenerkennung erfolgt mittels einer Kinect v2 der Firma Microsoft. Diese ermöglicht eine Echtzeitgestenerkennung, um auf die Eingabe von Patienten/innen zu reagieren.
Patientenprofile und Abläufe einer Therapiesitzung werden in einer SQL Datenbank hinterlegt. Dadurch lässt sich der Therapiefortschritt jeder Zeit ablesen und in Diagrammen veranschaulichen.
Weitere zukünftige Erweiterungen bringen immer mehr Übungen und Spiele, um die Patienten/innen motivierend beim Training zu halten. Die Spiele sind als Aufgaben aufgebaut, die die/der Patient/in durch den Roboter lösen muss. Durch Gestenerkennung wird der Roboter gesteuert.
Zum Einsatz kommen eine Kinect V2 von Microsoft zur Gestenerkennnung und ein YuMi Roboter der Firma ABB.


christian.lutnik@htl-klu.at

alexander.zikulnig@htl-klu.at

norbert.hoerandner@htl-klu.at

mathias.brandstoetter@joanneum.at