Details
Hier erhalten Sie nähere Informationen über unser Projekt.
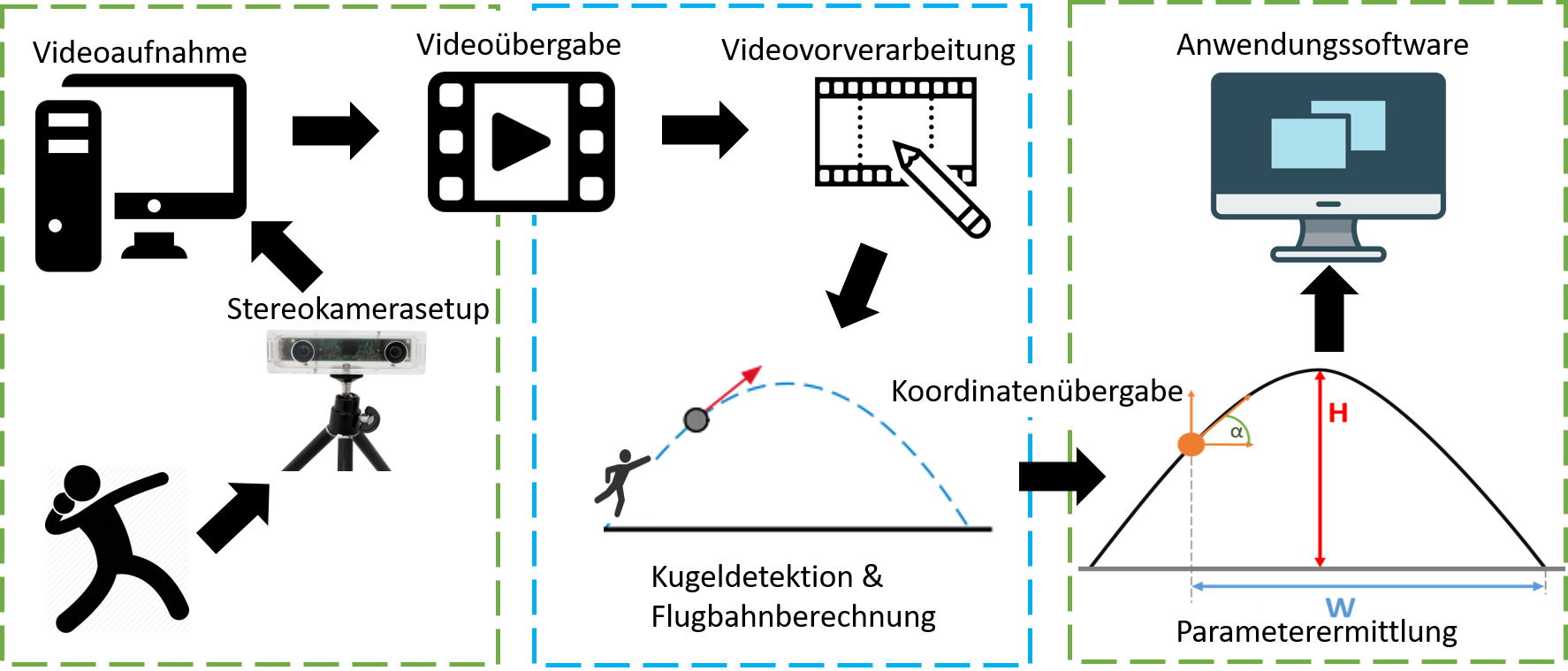
In der folgenden Abteilung sehen Sie unsere Systemübersicht. Der Aufbau unseres Systems ist folgender: Der Kugelstoß wird von einem Stereokamerasetup aufgenommen. Danach werden die Bilder für die Kugeldetektion und Flugbahnberechung vorbereitet. Nachdem die 3D Koordinaten ermittelt werden, kann eine Flugbahn erstellt und wichtige Parameter ermittelt werden. Die Ergebniss werden ansprechend in einer Anwendungssoftware dargestellt.
Hardware
Prinzip
Zum Aufnehmen des Kugelstoßes wird ein Stereokamerasetup verwendet. Bei solch einem Setup befinden sich zwei idente Kameras direkt nebeneinander. Dadurch können wie beim menschlichen Auge 3D Informationen gewonnen werden.
Realisierung
Als Stereokamerasetup werden zwei Webcams der Marke Logitech verwendet. Die Ansteuerung dieses Setups erfolgt mit MATLAB.
Software
Prinzip
Die Kugel soll mittels Objekterkennung in den Videos detektiert werden. Daraus soll eine Flugbahn ermittelt werden und aus dieser die relevanten Parameter errechnet werden. Die Ergebnisse und der Kugelstoß sollen in einer Anwendungssoftware dargestellt.
Realisierung
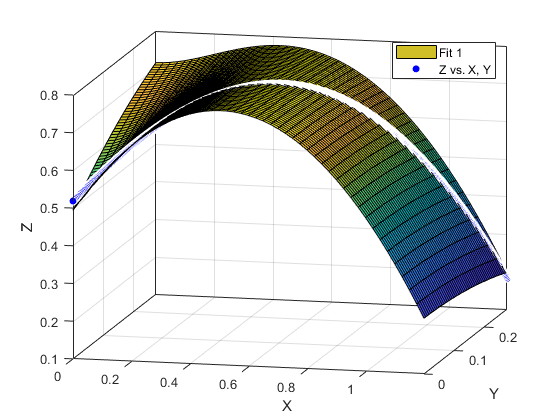
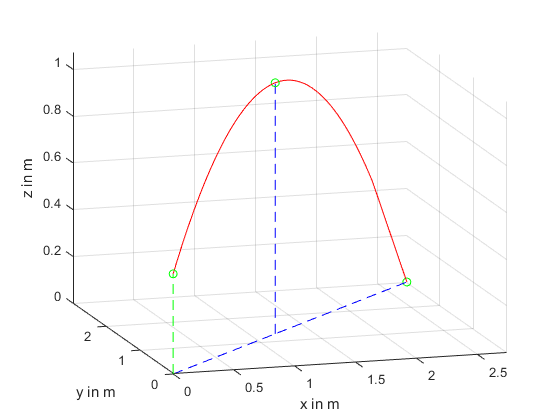
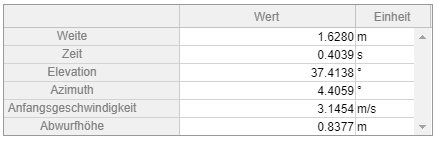
Die gesamte Softwarerealisierung erfolgt mit dem Programm MATLAB. Mittels Interpolation und Triangulation soll aus den erkannten Objekten Punkte für die Flugbahn berechnet werden. Durch das Curve Fitting Tool wird eine Flugbahn in diese Punkte gelegt. Nun ist es möglich, aus dieser Flugbahn die Parameter wie Abwurfwinkel, Wurfweite und Abwurfgeschwindigkeit zu berechnen. Der App Designer ermöglicht die Erstellung einer benutzerfreundlichen Anwendungssoftware.