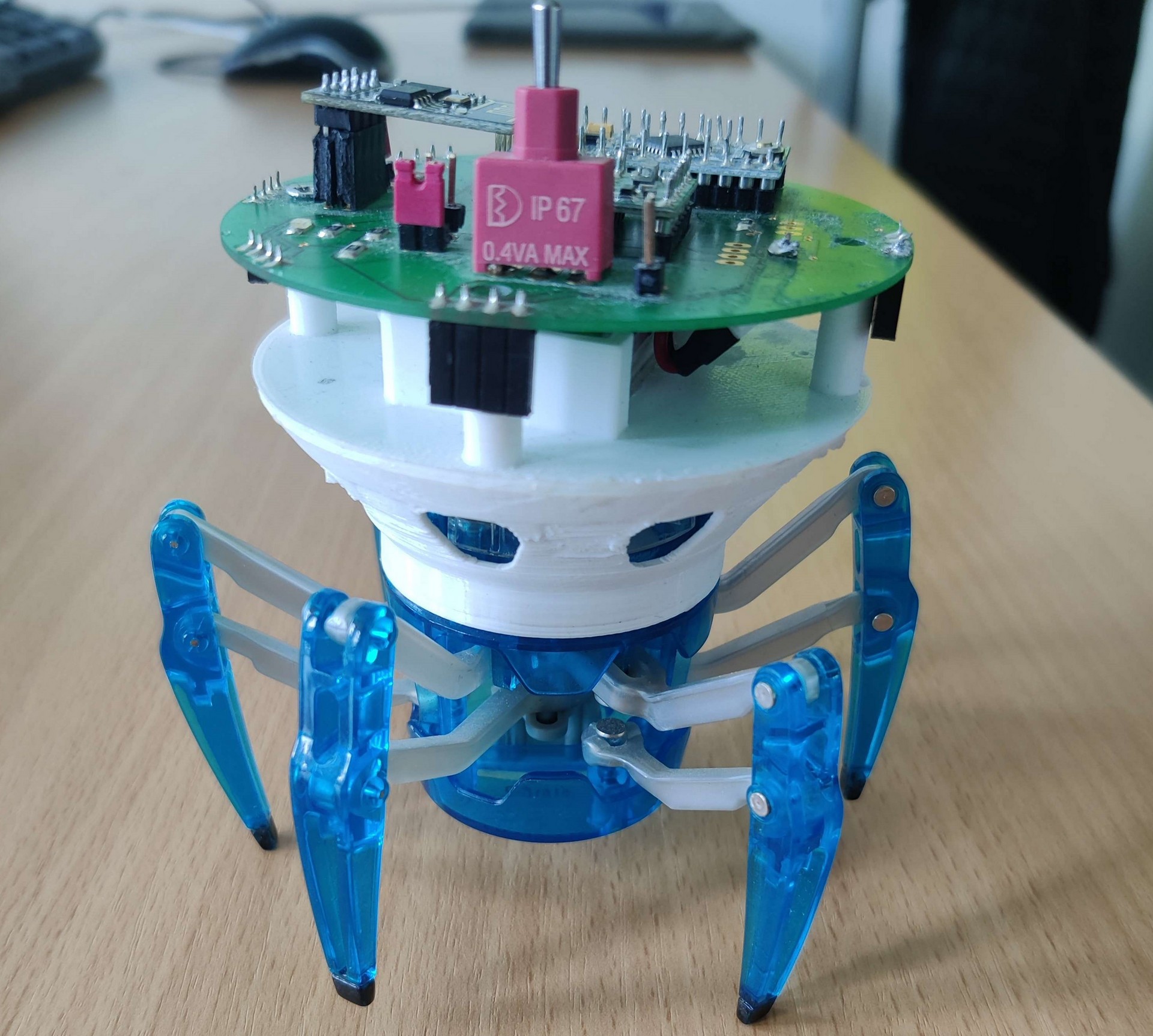
Die AAU und Lakeside Labs benutzen im Moment SpiderInoBots, die eine Batterie besitzen, die man manuell heraus nehmen muss, um sie zu laden. Der SpiderInoBot ist ein Schwarmroboter, weswegen es mühsam ist jeden einzelnen aufzuladen. Ziel dieser Diplomarbeit ist es eine Ladestation anzufertigen, die den SpiderInoBot lädt und ein System zu entwickeln, sodass der SpiderInoBot, sobald er zu wenig Akku besitzt, automatisch zur Ladestation findet.
The AAU and Lakeside Labs are currently using SpiderInoBots that have batteries that need to be taken out in order for them to be charged. Due to the SpiderInoBot being a swarm robot it is tedious to charge every single one. The goal of this diploma thesis is to create a charging station that charges the SpiderInoBot and to implement a system that helps the SpiderInoBot find its way to the charging station when its battery is low.
We were able to work on the project thanks to our partners.