
Willkommen!

Herzlich willkommen auf unserer Projekthomepage!
Diese Seite soll Informationen zum Diplomarbeitsprojekt Shape Master bereitstellen. Unsere Diplomarbeit entstand in Zusammenarbeit mit der f@ctory der HTL Mössingerstraße und hat die Bereitstellung einer vollständig funktionsfähigen Fräsmaschine zum Ziel.
Deutsch
Unsere Diplomarbeit beschäftigt sich mit dem Umbau eines bestehenden Industrieroboters der Firma WITTMANN Technology GmbH in eine funktionsfähige Fräsmaschine für die f@ctory der HTL Mössingerstraße. Darüber hinaus soll die Betriebssicherheit der Fräsmaschine durch Einbau einer umfangreichen Sicherheitsausstattung sichergestellt und der Schaltschrank entsprechend modernisiert werden. Die Frässtücke werden anschließend auf einen eigens konstruierten Frästisch ausgefräst, während die Achsenansteuerung mittels Frequenzumrichtern erfolgt.English
Our diploma thesis aims to convert an existing industrial robot from the company WITTMANN Technology GmbH into a functional 3D milling machine for the f@ctory of the HTL Mössingerstraße. Additionally, new safety equipment shall be installed to give the milling machine a secure working environment, and furthermore, the control cabinet will be accordingly modernized. The milling pieces are going to be milled on a specially designed milling table, while the axes are operated by frequency converters.Kurzbeschreibung
Details
Beschreibung
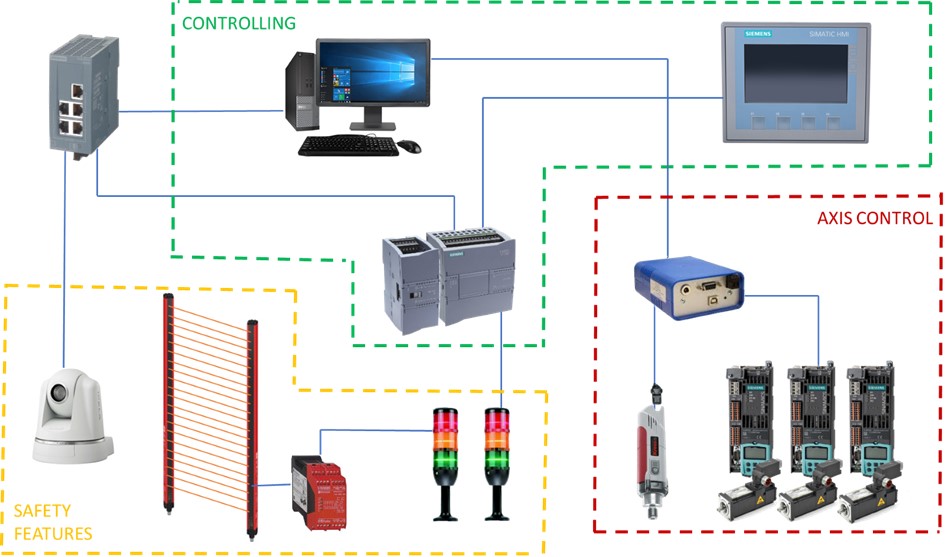
Unsere Anlage umfasst einen bestehenden WITTMANN Industrieroboter, der zu einer Fräsmaschine umfunktioniert wird. Die Fräsmaschine wird dabei mit SPS und Frequenzumrichtern überwacht und angesteuert. Aufträge werden mittels eines zugehörigen PCs gestartet und anschließend auf dem zugehörigen Frästisch ausgefräst. Um die Achsenansteuerung zu üben, wird diese zuerst auf einer Übungsachse realisiert und anschließend übernommen. Die Fräsmaschine befindet sich dabei in einem eigenen Raum, der modernisiert und mit den nötigen Sicherheitsmaßnahmen, wie Lichtvorhängen, Not-Aus-Tastern und einer Sicherheitskamera, ausgestattet wird. Der Schaltschrank wird entsprechend mit neuen Komponenten verkabelt und um eine PC-Halterung erweitert.
Arbeitspunkte
- Bedienung der Fräsmaschine über HMI und einen eigenen PC
- Achsenansteuerung entsprechend der Übungsachse vornehmen
- Erweiterung der Raumausstattung
- Überarbeitung des Schaltschranks
- Realisierung der Sicherheitsausstattung
- Konstruktion eines Frästisches
Software
- SolidWorks & AutoCAD: zur Konstruktion der mechanischen Komponenten
- TIA-Portal: Programmierung von SPS und HMI
- SINAMICS STARTER: Zur Achsenansteuerung
- EPLAN: Schaltplan zeichnen
- SafetyToolBox (PGX Software Solutions): Programm zur Risikobeurteilung
- MS Project: Programm zur Zeitplanung
Unser Team

Nico Sausenger
Assembling | SPS | Signalanpassung Teamleiter
nico.sausenger@htl-klu.at

Bianca Perné
Verkabelung | Raum- und Schaltschrankplanung
bianca.gojer@htl-klu.at

Leonie Wassermann
Konstruktion | Programmierung | Sicherheitsmaßnahmen
leonie.wassermann@htl-klu.at

Ing. Bernhard Wurnitsch, BEd
Betreuer
bernhard.wurnitsch@htl-klu.at

Dipl.-Ing. Dr. Gerhard Kukutschki
Betreuer
gerhard.kukutschki@htl-klu.at