Das Projekt PickMeUp steuert einen pneumatik Roboter mit Hilfe eines
Mikrocontrollers an, die Steuerung erfolgt über den PC oder das Smartphone. PickMeUp soll den Schülern und Schülerinnen, die Welt des Java programmierens näher bringen.
Eine einfache Java Bibliothek kann in Eclipse Importiert werden, um in Eclipse seine einge Benutzeroberfläche erstellen zu können.
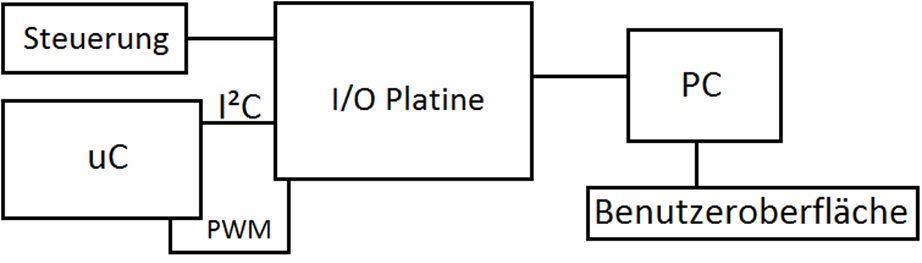
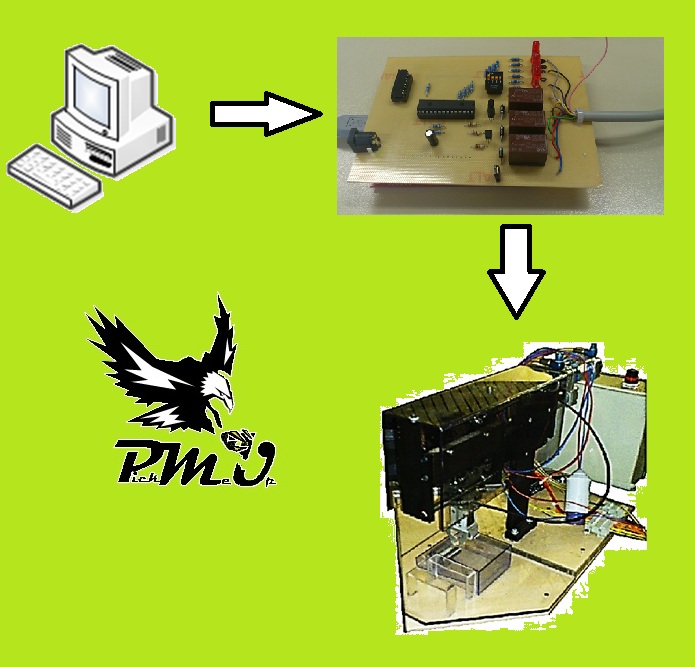
Blockschaltbild und Funktionsprinzip V1.0
Click to enlarge
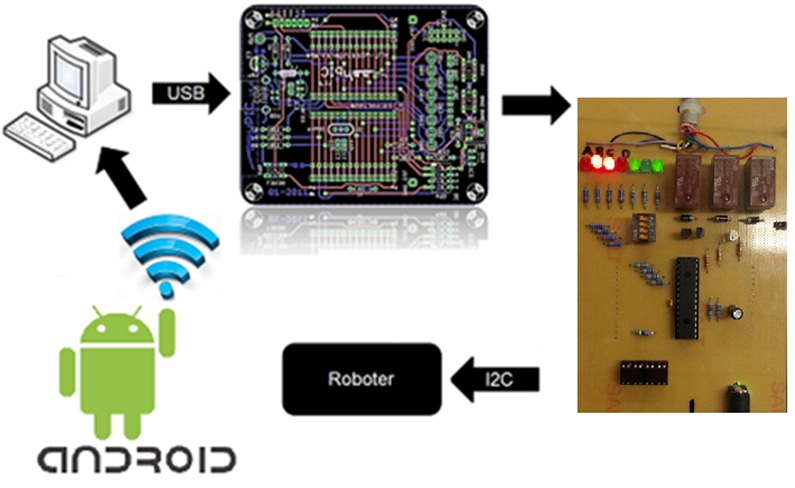
Blockschaltbild V3.0
| Click to enlarge
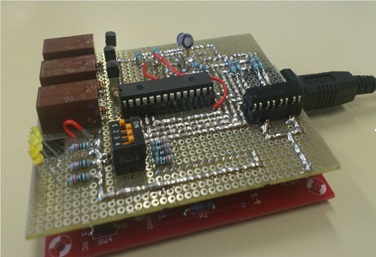
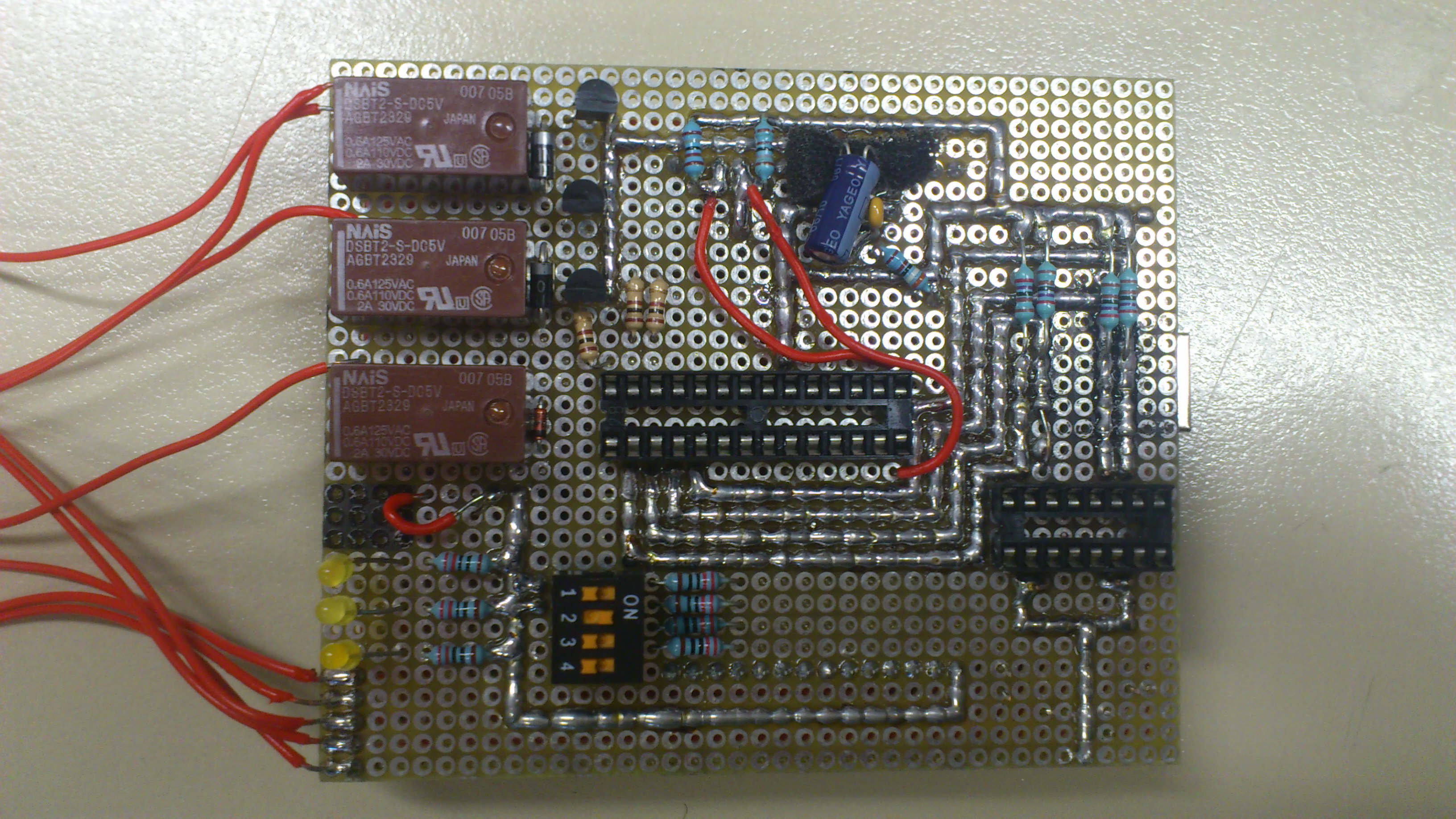
PickmeUp - Probeplatine V1.0
Der erste Prototyp wurde auf einer Lochraster-Platine aufgebaut. Click to enlarge
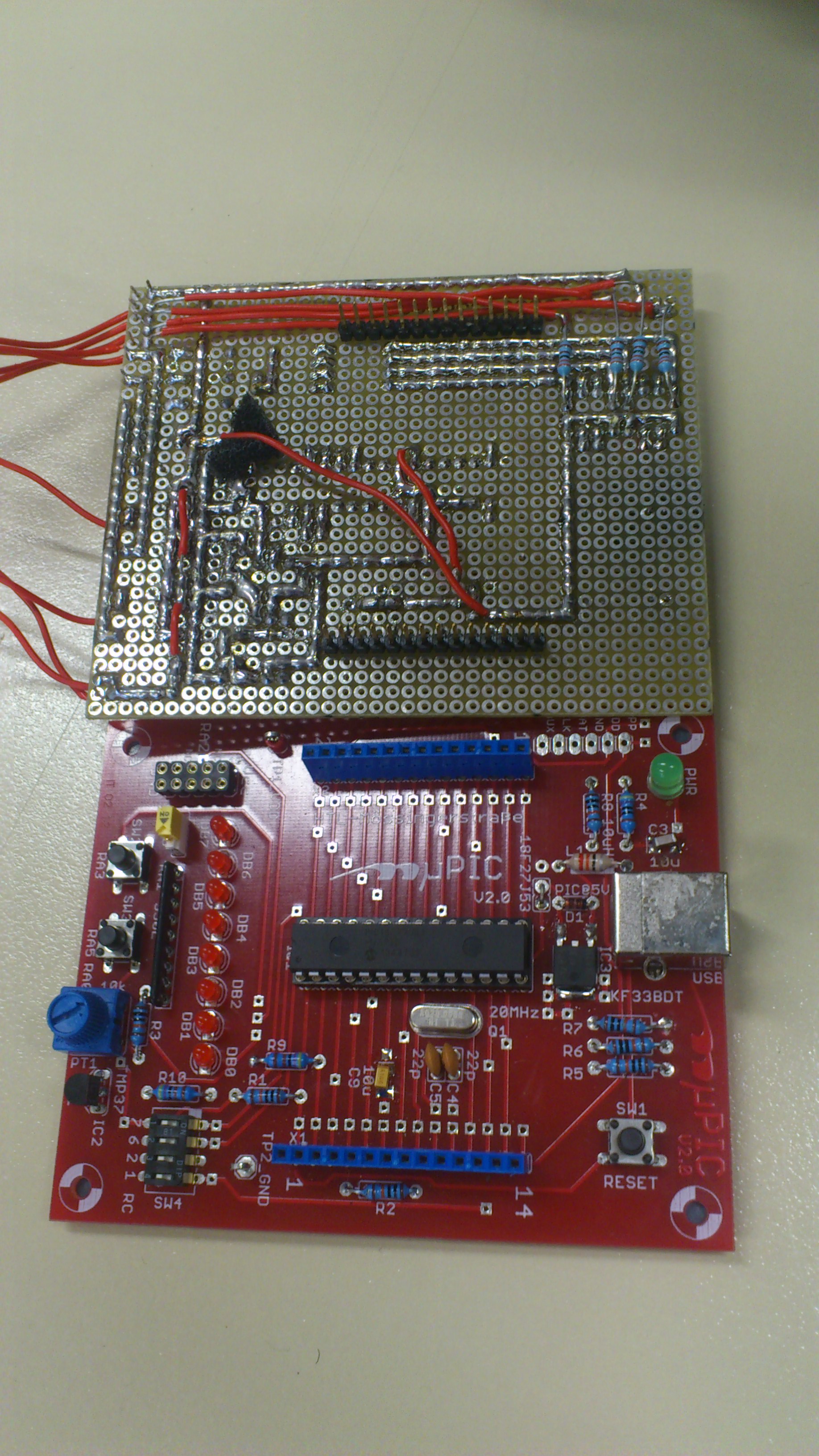
PickmeUp - PickmeUp-Platine V2.0
| Eine erste funktionsfähige Platine wurde gefertigt. Click to enlarge
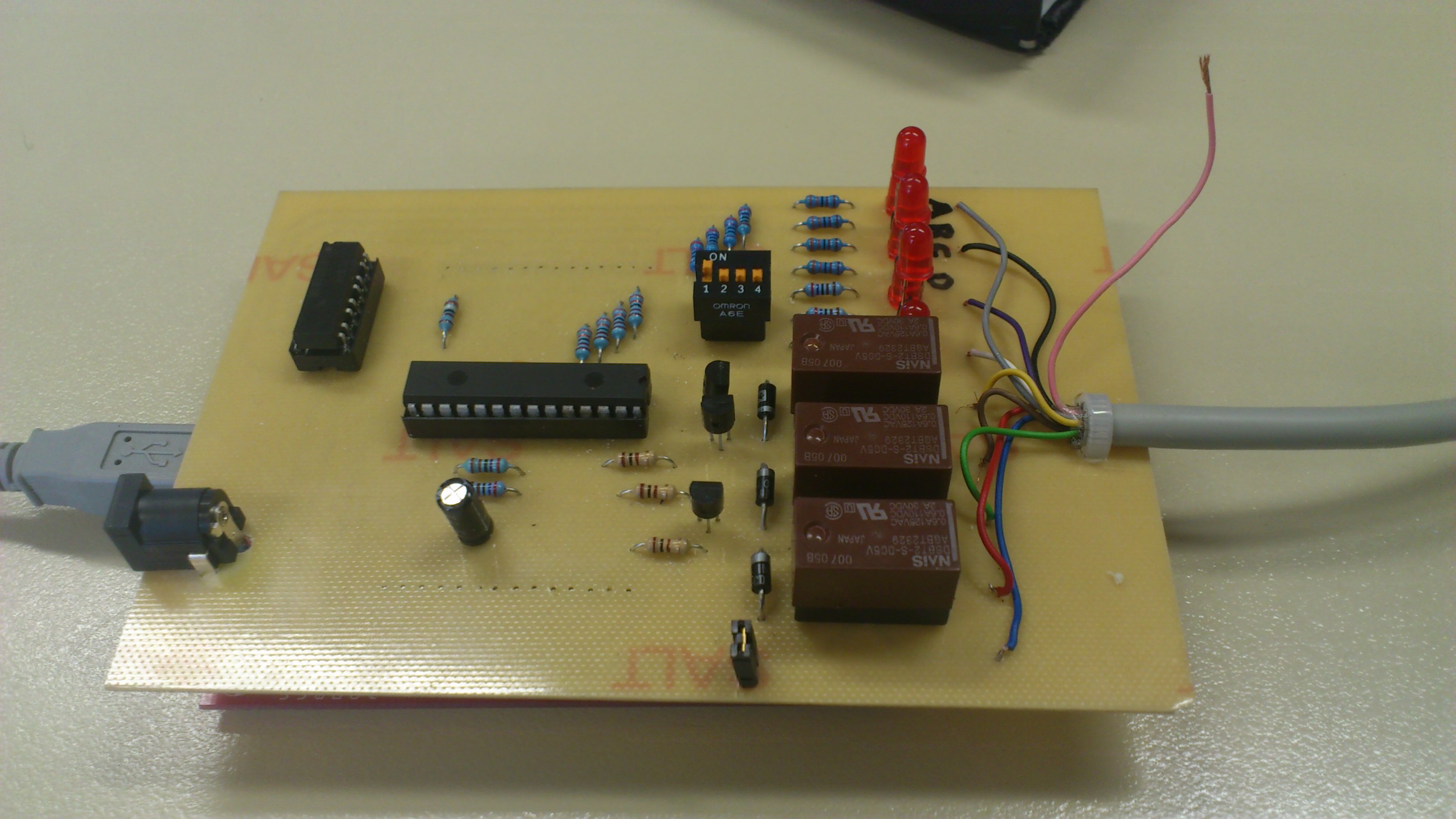
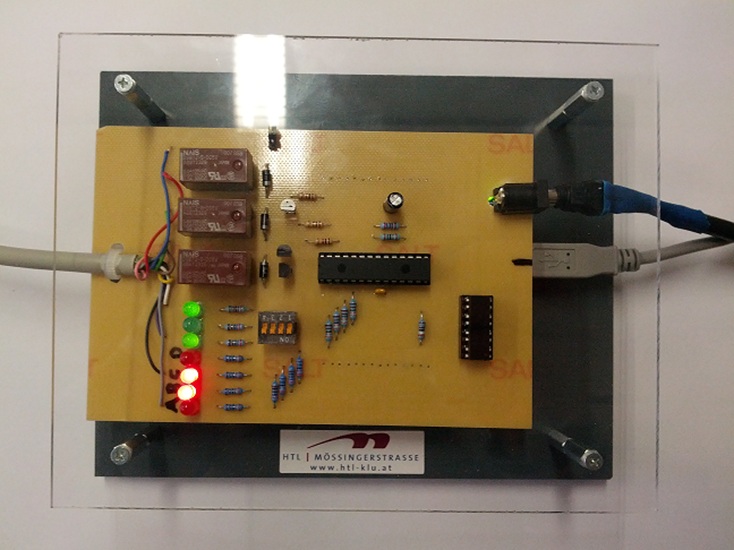
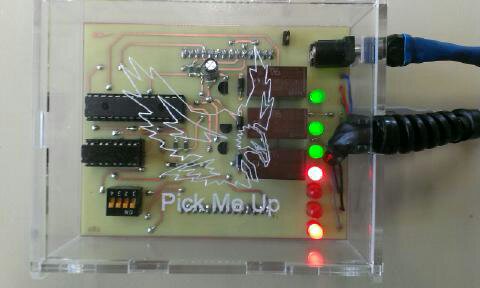
PickmeUp - PickmeUp-Platine V3.0
| Ein Gehäuse wurde für die Platine erstellt und die LEDs wurden gewechselt. Click to enlarge
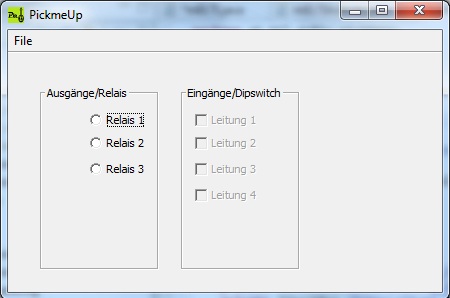
PickmeUp - Interface V1.0
| Benutzerdefinierte Oberfläche, diese wurde in Java Eclipse programmiert. Click to enlarge
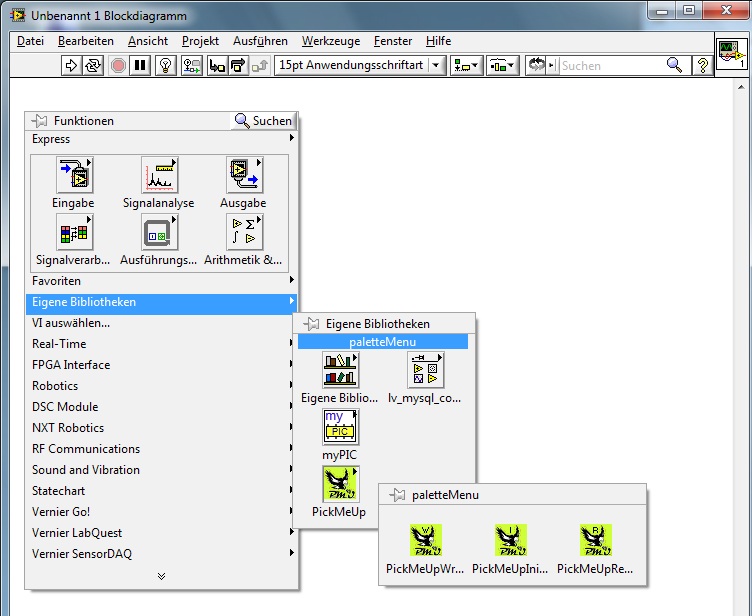
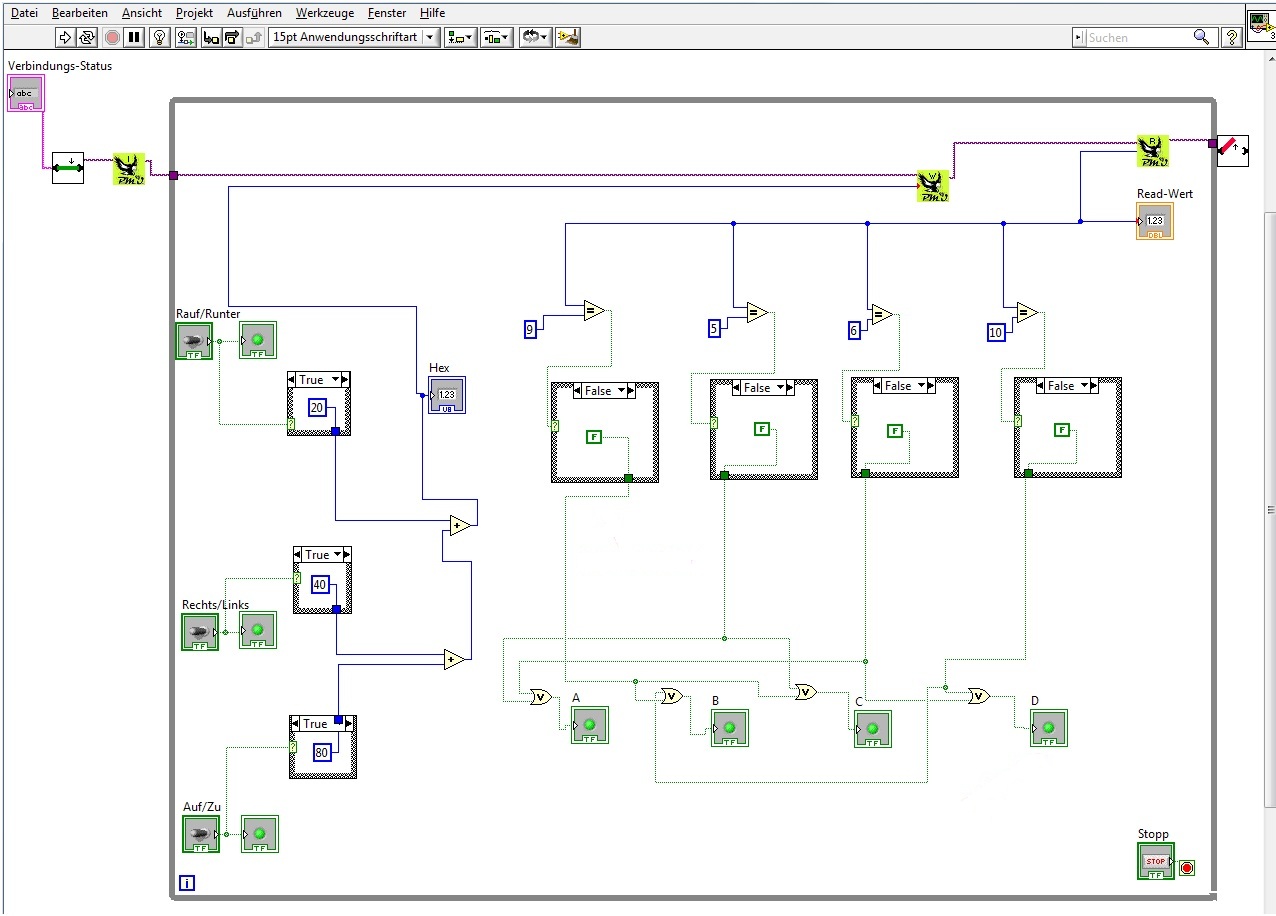
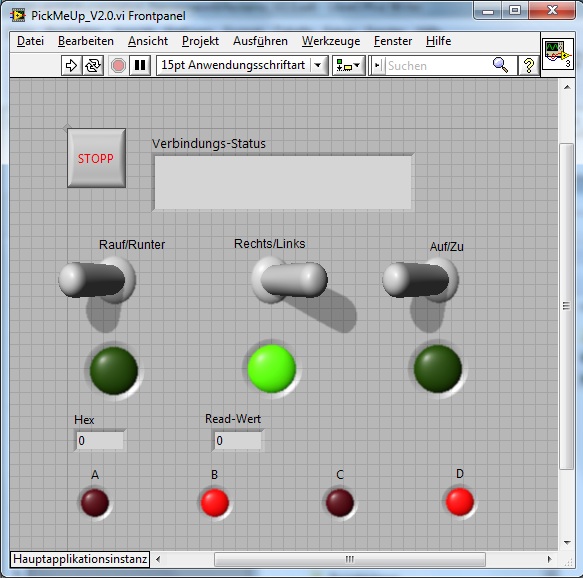
PickmeUp - Labview V3.0
| Hier haben sind Bilder vom Labview Interface. Click to enlarge
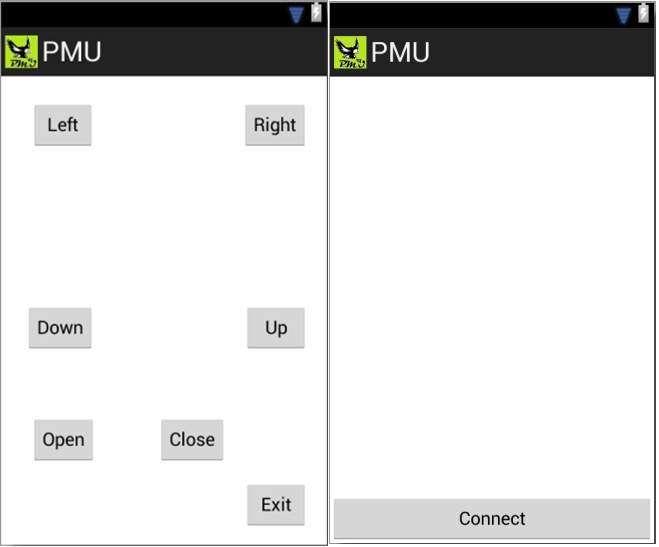
PickmeUp - Android Interface V3.0
| Click to enlarge
PickmeUp - PickmeUp-Platine und Gehäuse V3.0
| Ein Gehäuse wurde aus PVC angefertigt Click to enlarge
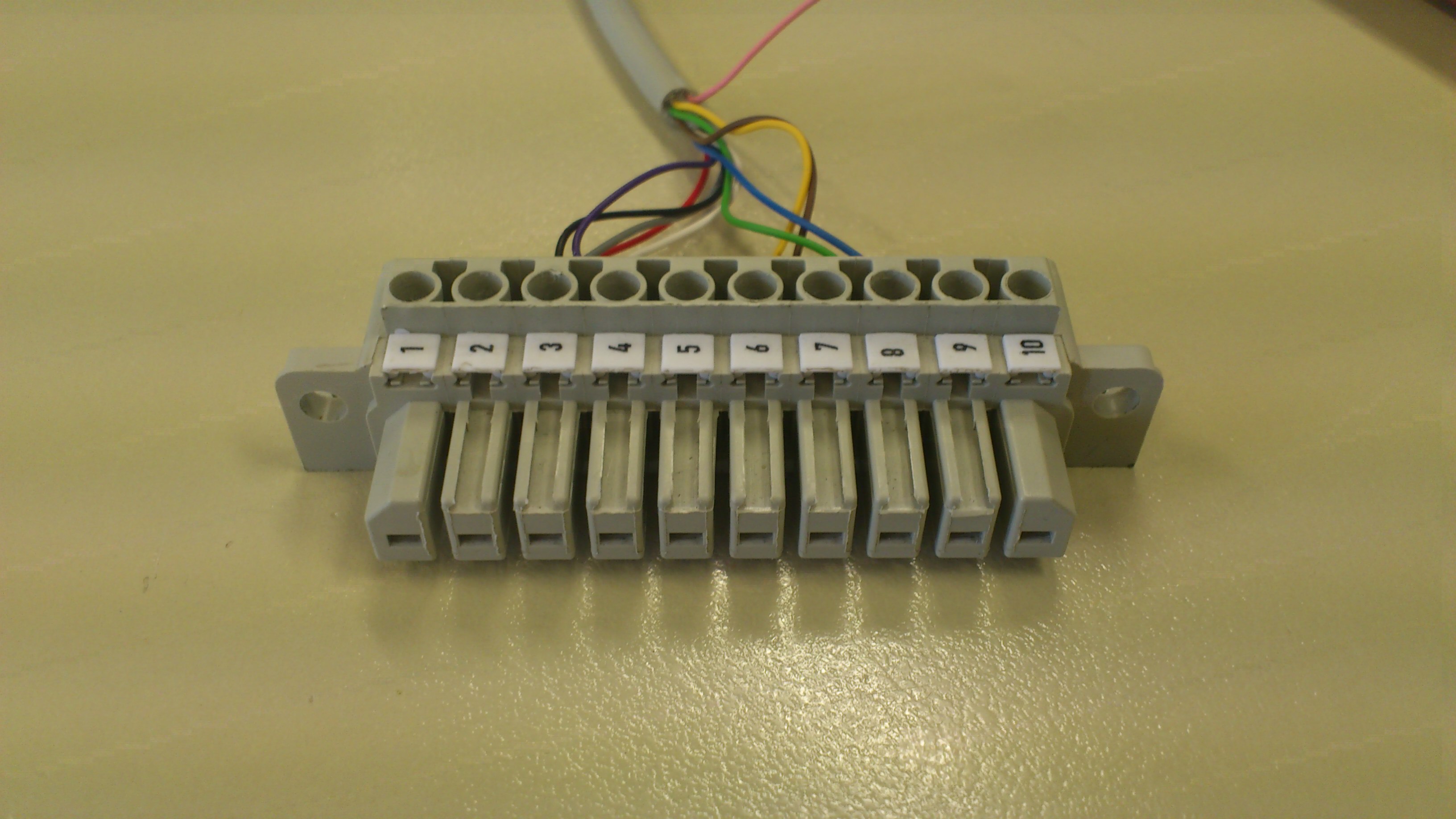
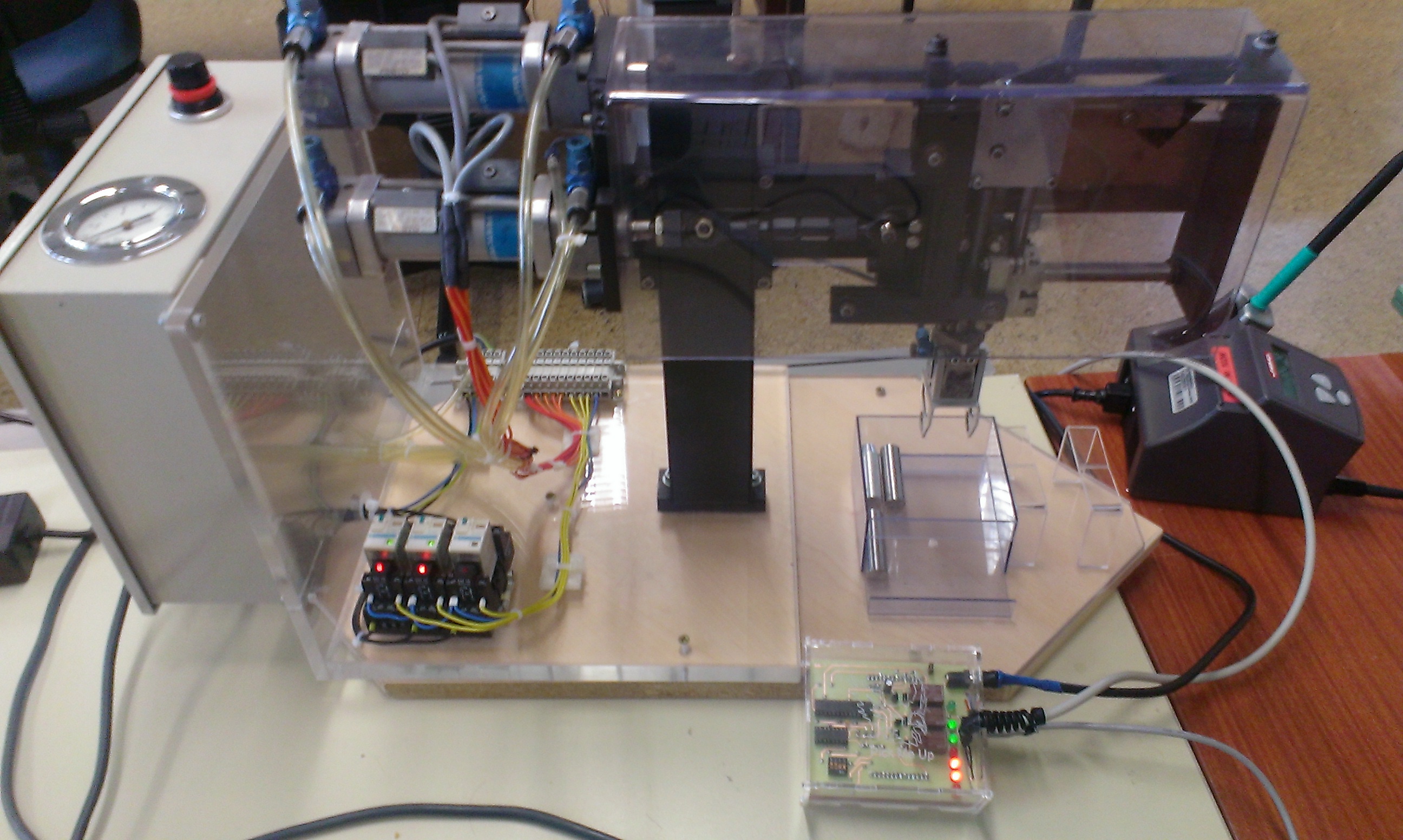
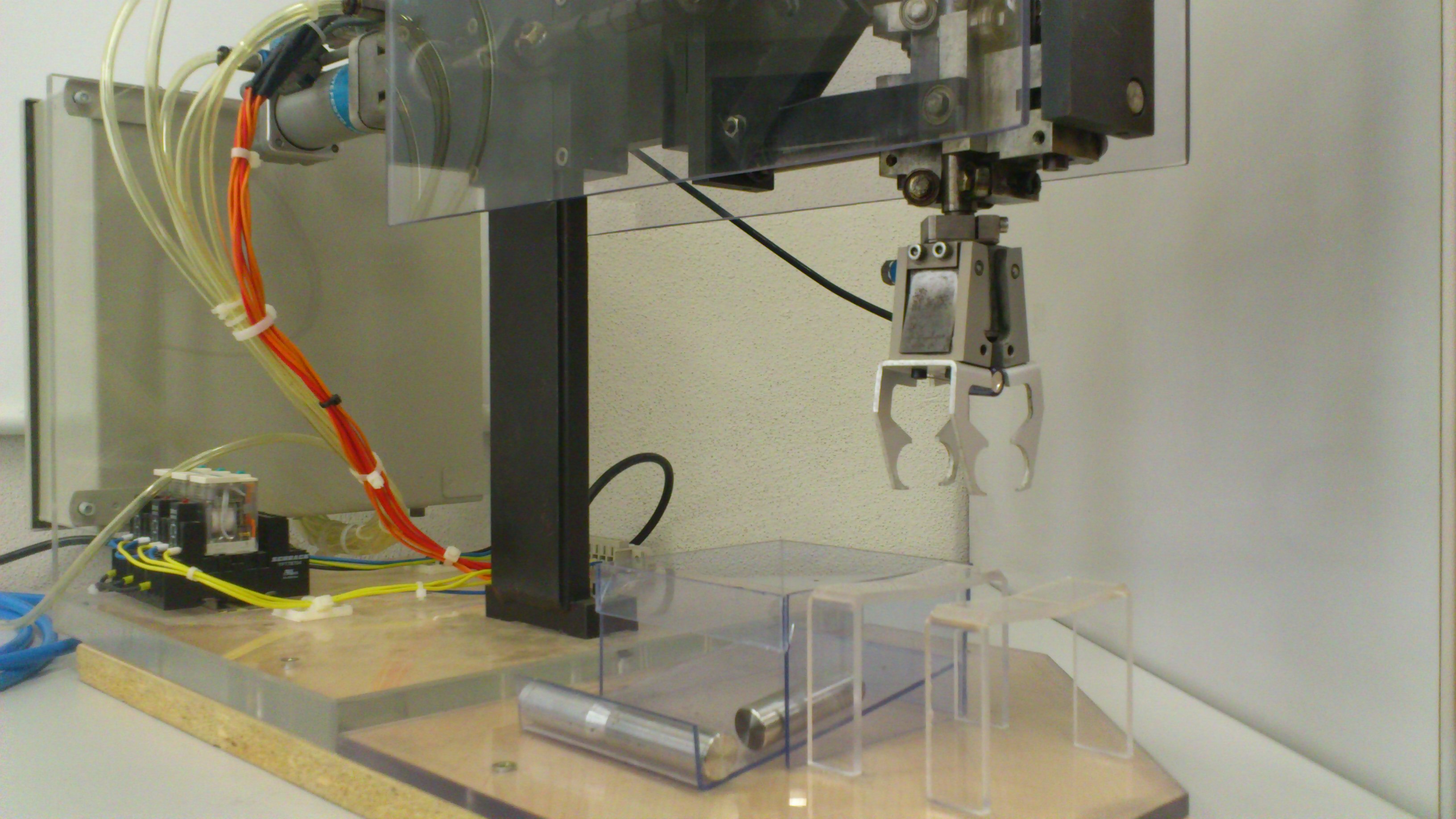
PickmeUp - Pneumatik Roboter
| Bilder von unserem Pneumatikroboter PickmeUP. |