Details
Hier sind einige Bilder zur Veranschaulichung des Projekts.
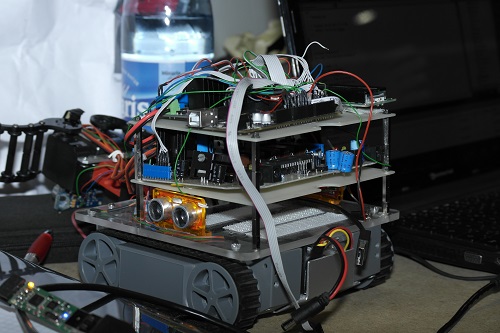
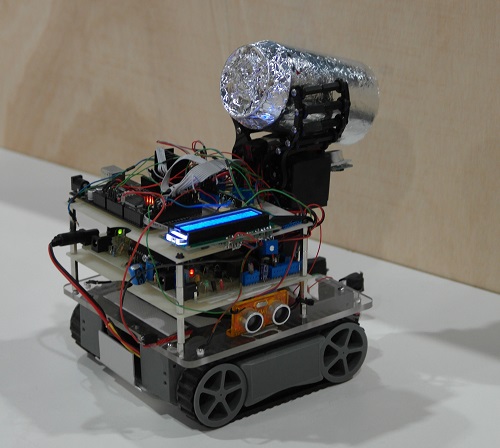
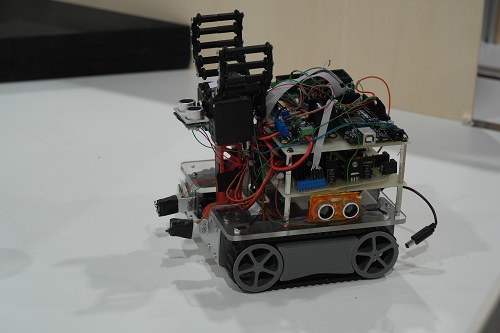
Robocup Roboter
Dies ist der Robocup Roboter. Er wurde von uns gebaut für den Robocup. Er ist in der Lage Linien zu folgen, eine Dose zu finden und aufzuheben, und den Weg durch ein Labyrinth zu finden. Wir erreichten mit diesem Roboter den 3. Platz unter 46 Teilnehmern aus ganz Österreich.
 |  |  |
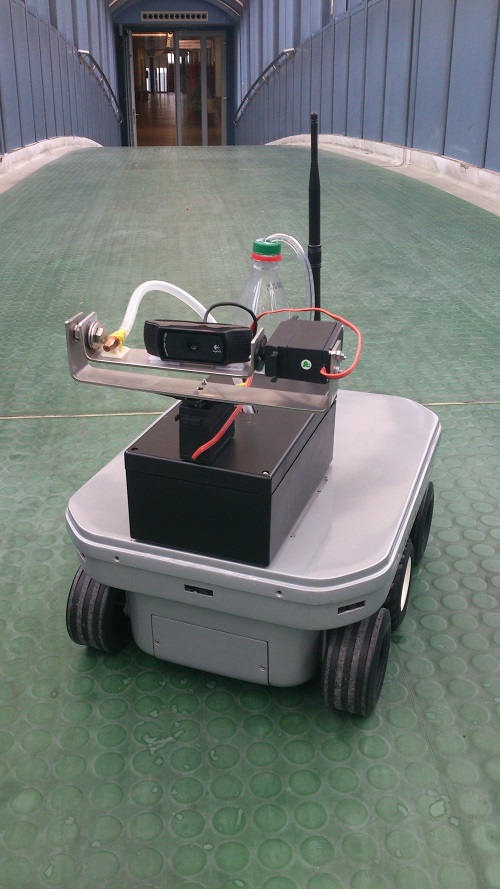
Kurt2
Der dritte Roboter ist Kurt2 und ist Eigentum der HTL Mössingerstraße. Auch er wurde von uns renoviert und mechanisch und elektronisch an die Bedürfnisse des Projekts angepasst. An Board hat er einen kleinen Computer, auf dem Windows 7 läuft. Über diesen Rechner ist er mittels WLAN mit dem Server verbunden. Weiters besitzt er eine Webcam und eine Scheibenwischerpumpe inklusive Wassertank. Diese befinden sich auf seinem horizontal und vertikal um 180 ° drehbaren Kopf.
 |  |
Rob3
Der Roboterarm Rob3 wurde uns von der HTL-Mössingerstraße funktionsunfähig geschenkt und von uns mit neuer Hard- und Software ausgestattet. Es ist möglich ihn mittels eines GUI, einem XBox Controller und Sprachbefehlen zu steuern. Weiters haben wir einen Makroeditor, einen Makrorecorder und einen Makroexecuter geschrieben, welche es möglich machen Bewegungsabläufe selbst zu programmieren, oder vom User verwendete Bewegungsabläufe abzuspeichern, um diese später wiederzuverwenden. Mit unserer Software ist es auch möglich, den Greifer entlang der 3 Achsen zu bewegen.
 |  |