Details
Auf dieser Seite finden Sie Informationen zu den einzelnen Iterationen des Projektes.
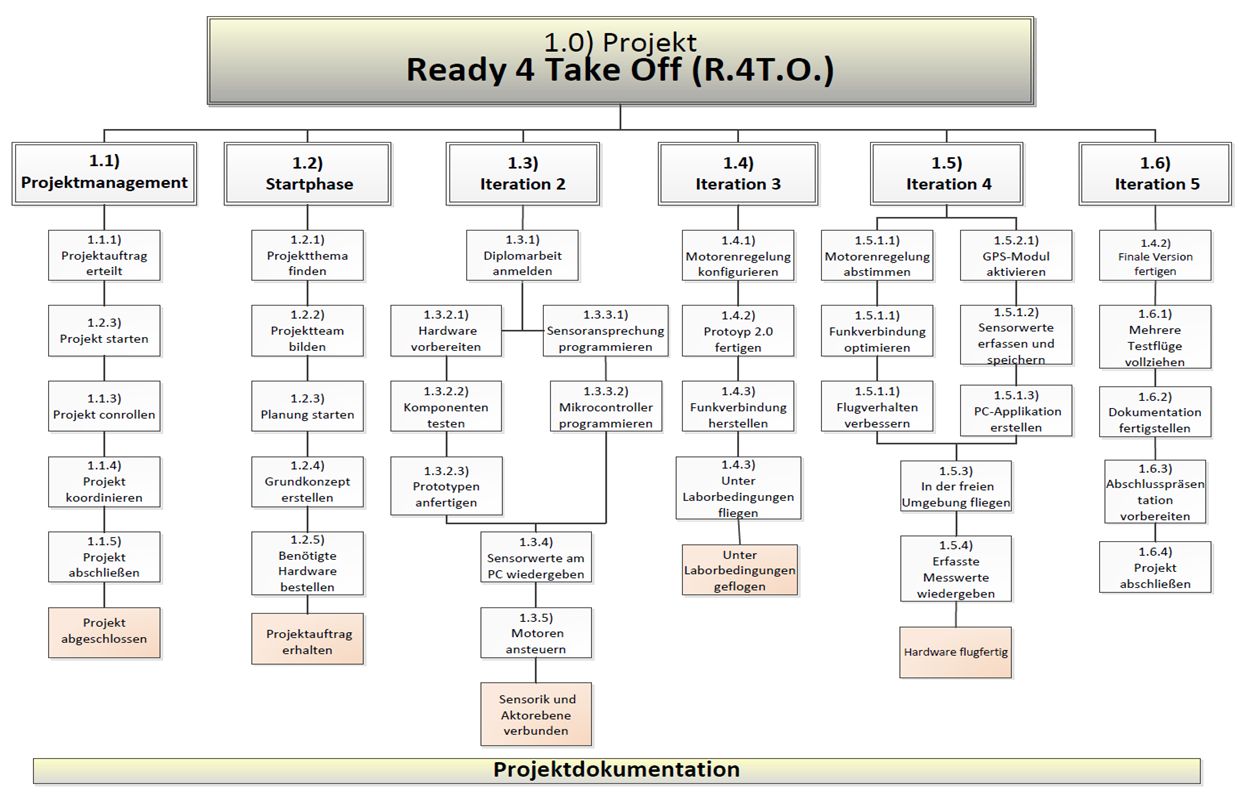
In dieser Phase wurden der Projektstrukturplan so wie die nötigen Projektanträge erstellt. Die Iteration wurde mit einer abschließenden Präsentation und einer "Go"-Entscheidung erfolgreich am 8. Oktober abgeschlossen.Projektstrukturplan und Einteilung der Baugruppen...
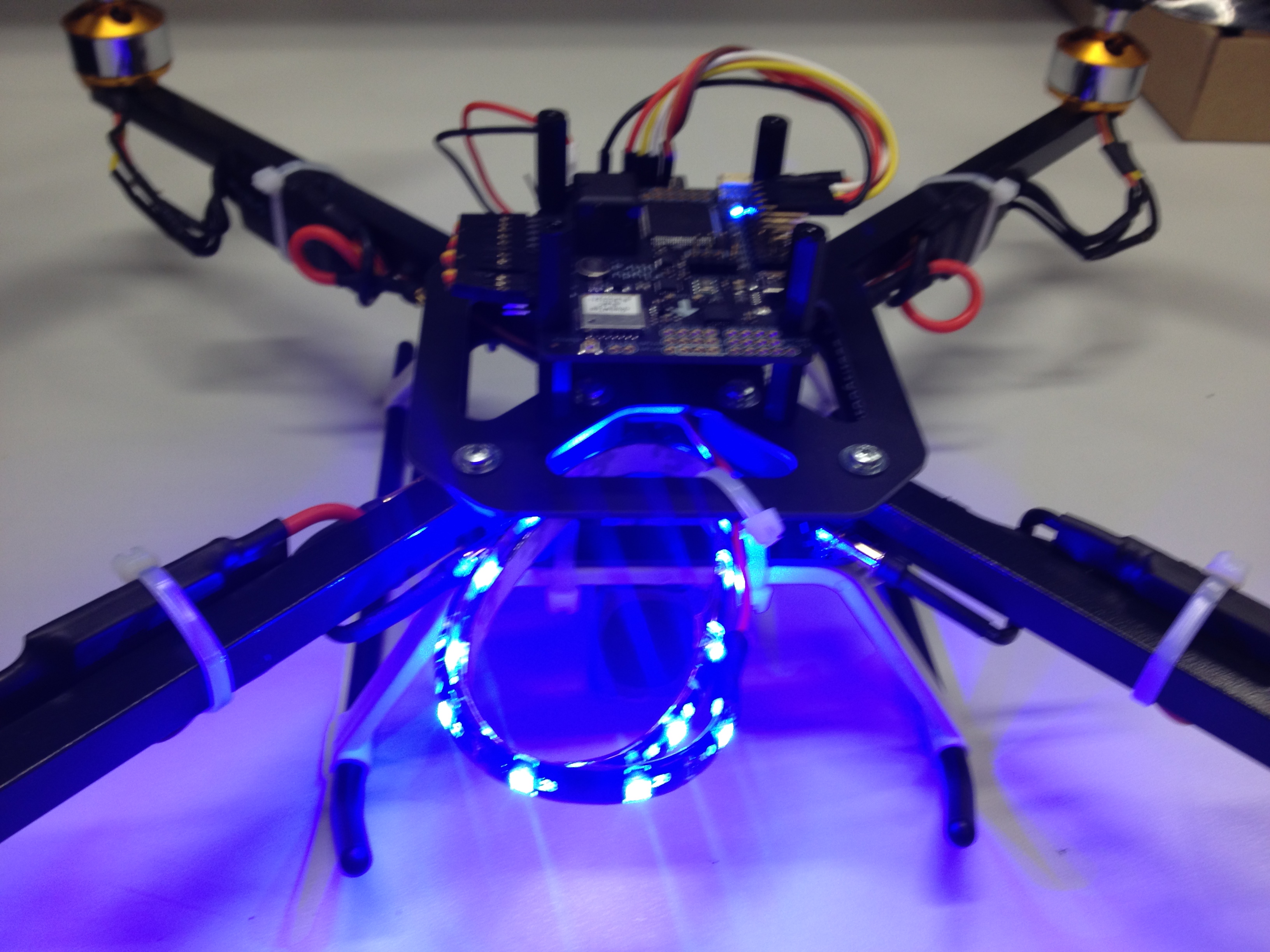
Am 28. November wurde die Iteration 2 mit einer kurzen internen Projektpräsentation beendet. Teilgenommen dabei hat das Projektteam und beide Betreuer. Es wurde der aktuelle Stand der Dokumentation und des Projektes an sich überprüft.Prototyp des fertigen Quadrocopters...
Zum Ende des siebten Semesters fand die Zwischenpräsentation statt. Hier wurde der momentane Projektstatus vorgestellt und die noch offenen Punkte für das nächste Semester.
Nach einigen Testflügen konnten erste Ergebnisse erzielt werden. Leider mussten wir aufgrund von Hardwaredefekten (kaputte Controllerplatine, etc.), einige Zeit investieren.
Das Video zeigt den Projektfortschritt im Laufe des achten Semesters. Von fehlgeschlagenen Flugversuchen bis zum funktionsfähigen Quadrocopter!
Iteration 1
Die erste Projekiteration befasste sich hauptsächlich mit der Planung der einzelnen Phasen und der benötigten RessourcenIn dieser Phase wurden der Projektstrukturplan so wie die nötigen Projektanträge erstellt. Die Iteration wurde mit einer abschließenden Präsentation und einer "Go"-Entscheidung erfolgreich am 8. Oktober abgeschlossen.
Iteration 2
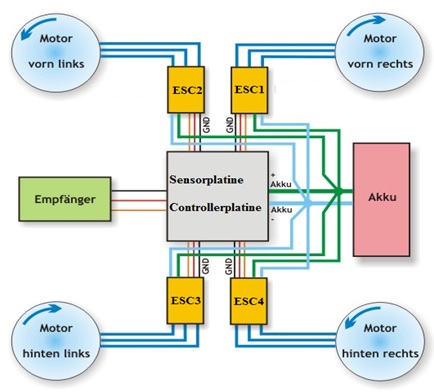
Im zweiten Projektabschnitt steht die Realisierung im Vordergrund. Das Projekt nimmt schön langsam Form an und erste Erfolge sind bereichts verzeichnet. So war es uns möglich, am 26. November 2013 das erste mal alle 4 Motoren über die Controllerplatine anzusteuern.Am 28. November wurde die Iteration 2 mit einer kurzen internen Projektpräsentation beendet. Teilgenommen dabei hat das Projektteam und beide Betreuer. Es wurde der aktuelle Stand der Dokumentation und des Projektes an sich überprüft.

Iteration 3
Am 18. Dezember 2013 konnten alle vier Motoren mittels Funkfernbedienung mit verschiedenen Leistungsstufen angesteuert werden. Der nächste Schritt umfasst die genaue Regelung der einzelnen ESCs.Zum Ende des siebten Semesters fand die Zwischenpräsentation statt. Hier wurde der momentane Projektstatus vorgestellt und die noch offenen Punkte für das nächste Semester.
Iteration 4
In der vierten Iteration wurde die Hardware fertig gestellt. Das Hauptaugenmerk lag aber auf der stabilen Regelung.Nach einigen Testflügen konnten erste Ergebnisse erzielt werden. Leider mussten wir aufgrund von Hardwaredefekten (kaputte Controllerplatine, etc.), einige Zeit investieren.


Iteration 5
Die letzte Iteration diente der Optimierung und Dokumentation. Die finale Projektpräsentation findet am 7. Mai 2014 statt und damit wird der Projektteil, der das Labor betrifft abgeschossen.Das Video zeigt den Projektfortschritt im Laufe des achten Semesters. Von fehlgeschlagenen Flugversuchen bis zum funktionsfähigen Quadrocopter!