Details
Unser Projekt besteht aus der Hardware Kinect, welche mithilfe der Softwareprogramme Microsoft-SDK, OpenNI und SimpleOpenNI mit Java kommunizieren kann.
Chair-Rising Test
Der Proband sitzt auf einem Stuhl normaler Höhe. Die Hände müssen vor der Brust verschränkt sein. Er wird aufgefordert, so schnell wie möglich bis zur völligen Streckung aufzustehen und sich wieder zu setzen. Die Arme müssen vor der Brust verschränkt bleiben, d.h. sie dürfen nicht als Stütze verwendet werden. Schafft es der Proband nicht, innerhalb von elf Sekunden fünf Mal aufzustehen oder benötigt er die Arme als Stütze, besteht erhöhte Sturzgefahr.

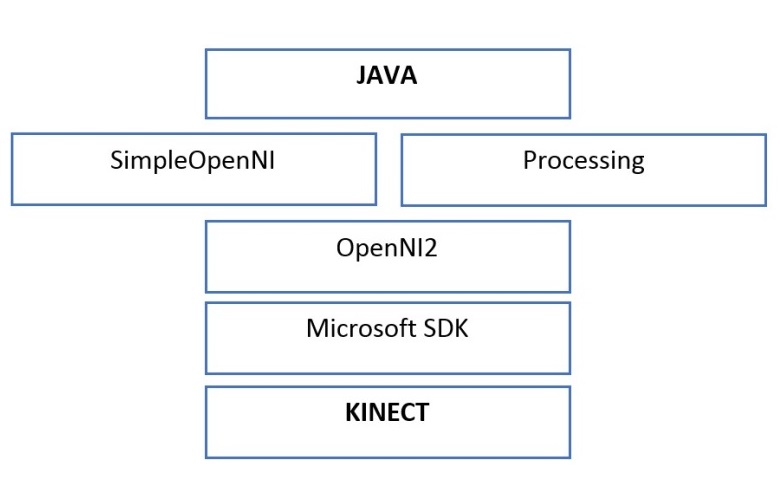
Softwarestruktur
Um mit der Kinect auf Java-Ebene kommunizieren zu können, sind verschiedene Software Programme notwendig.
Kinect-Sensor:
Kinect ist eine Hardware zur Steuerung der Videospielkonsole Xbox 360, die seit Anfang November 2010 verkauft wird. Kinect wurde von Microsoft zusammen mit der Firma PrimeSense entwickelt. Spieler können damit anstatt mittels herkömmlicher Gamepads allein durch Körperbewegungen die Software bedienen. Die Hardware der Kinect besteht aus zwei Sensoren (Infrarot- und schwarzweiß CMOS-Sensor) und einer RGB-Kamera, welche die Farbinformationen erfasst. Somit ist es möglich, an den Computer ein RGB-Bild und ein Tiefenbild zu liefern. Die zwei Sensoren der Kinect ermöglichen die Erstellung eines Tiefenbildes. Ein Sensor dient als Empfänger und der zweite Sensor dient als Sender. Der Sender strahlt ein Infrarot-Bild mit Fuzzy-Muster aus und mit dem zweiten Sensor, der als Empfänger dient wird das rückgestrahlte Muster erfasst. Durch die Epi-Polar-Geometrie kann von jedem Bildpunkt der Tiefenwert erfasst werden. Bei der Epi-Polar-Geometrie werden aus zwei Kamera-Bildern ein 3D-Bild und ein Tiefenbild erstellt. Zusätzlich enthält das Gerät noch ein Multi-Array-Mikrofon (bestehend aus vier Einzelmikrofonen) und kann sich eigenständig in einem gewissen Rahmen neigen und drehen.
Microsoft SDK:
Microsoft SDK ist ein Software-Development-Kit von Microsoft, welche Header-Dateien, Bibliotheken, Beispiele, eine Dokumentation und Hilfsprogramme für Microsoft Windows und NET beinhaltet. Microsoft SDK stellt Treiber bereit, damit auf die Daten des Tiefenbildes der Kinect zugegriffen werden kann.
Open NI:
OpenNI stellt die Middleware dar. Es handelt sich um einen mehrstufigen Prozess. Im ersten Schritt werden aus dem Tiefenbild einzelne Körpersegmente extrahiert und im zweiten Schritt werden auf Basis eines Algorithmus Joint Koordinaten extrahiert. Es handelt sich hierbei um eine Abschätzung, wobei der Optimalpunkt gesucht wird. Die Daten werden den weiteren Programmen bereitgestellt.
SimpleOpenNI und Processing:
SimpleOpenNI stellt die Library und Processing die direkte Schnittstelle dar. Da in Java nicht direkt auf die OpenNI Schnittstelle zugegriffen werden kann, werden die Daten von OpenNI konvertiert, indem z.B. Classen erstellt werden- damit Java darauf zugreifen kann.