Scheme:
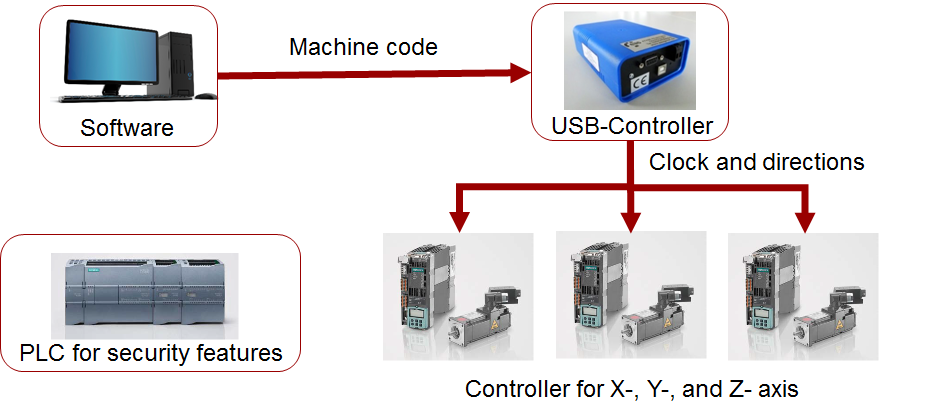
The project scheme looks like this. As you can see, it includes a computer where all the drawings are made. To make a drawing of the workpiece, we use the software solid works. This drawing is then converted into the machine code using the software NC-easy. We also use the software Starter for the startup of the robot. The data is then transmitted to the USB-controller. The USB-controller forms clock and directions and transmitts it to the Siemens Sinamics S110, which we use to control the servo motors. Additionally, we use a PLC for the safety features. To be specific, a Siemens Sinamic 1200.