Details
Projektübersicht
Positionsbestimmung
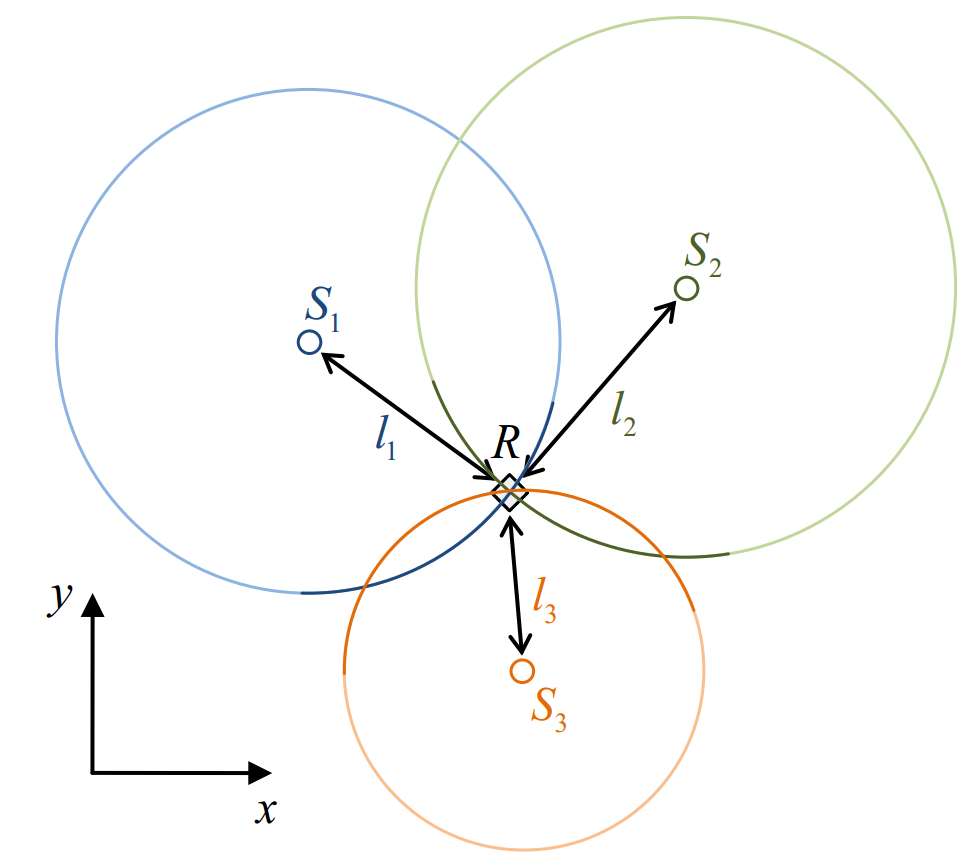
Im Zuge der Arbeit wurden mehrere Ansätze zur Bestimmung der Position analysiert. Umgesetzt wurde eine Trilateration auf Basis der Laufzeitmessung eines Ultraschallsignals. Die Trilateration ist eine Methode zur Berechnung einer Position in einem Koordinatensystem anhand von mindestens drei bekannten Punkten und deren Distanz zum Roboter.
Der Algorithmus ist in Java umgesetzt und wird als einfach verwendbare Software-Bibliothek zur Verfügung gestellt.
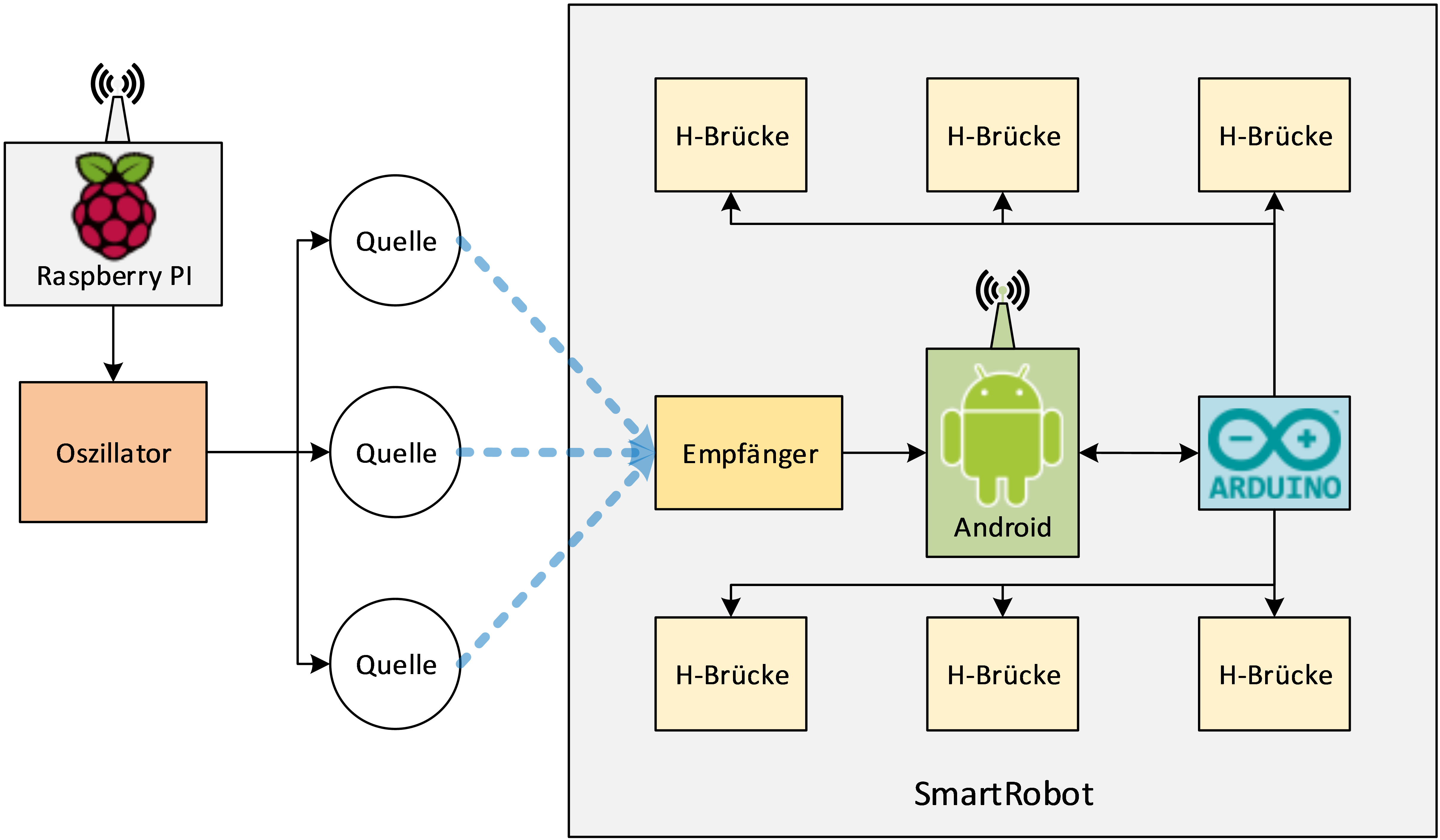
Um die benötigten Entfernungen zu messen wird eine Laufzeitmessung mithilfe eines Ultraschallsignal ausgeführt. Dazu wurde eine Ultraschallquelle entwickelt, die von einem Raspberry Pi, der als Server fungiert, angesteuert werden. Auf Basis der Zeit die das Signal von der Quelle, die an einem bekannten Punkt aufgestellt ist, zum Roboter benötigt kann die Entfernung berechnet werden.
Der Roboter
Um Zeit zu sparen wurde der mechanische Teil (das Chassis) des Roboters zugekauft.
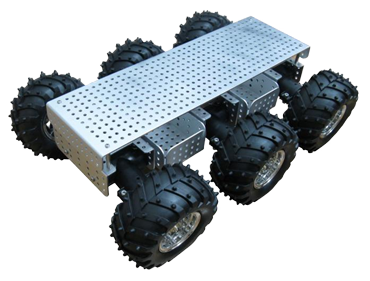
Diese enthält auch sechs Elektromotoren, die angesteuert werden müssen. Die dafür benötigte Elektronik wurde selbst entwickelt. Da das verwendete Smartphone über keine Hardwareausgänge verfügt wird dies von einem Arduino-Board übernommen. Für die Steuerung ist es deshalb wichtig eine Kommunikation zwischen dem Smartphone und dem Board zu ermöglichen.
Das Board empfängt Befehle vom Smartphone und setzt diese um. Die Motoren werden Mithilfe von H-Brücken gesteuert, die ein PWM-Signal vom Board empfangen.