Details
Ein einfacher Roboter sollte sowohl über Gestenerkennung (Kinect) als auch über eine einfache Handy-App gesteuert werden. Anbei die Aufgaben im Detail:
Roboter System
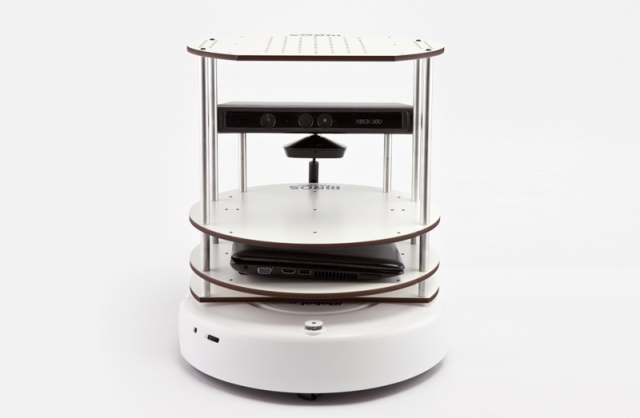
Der Turtlebot ist ein Roboter, welcher auf der Basis der CREATE-Plattform aufgebaut ist. Mithilfe eines spezifisch für die Robotersteuerung entwickelten Systems namens ROS (Robot Operating System), sollte die Lücke zwischen der Hardware eines Roboters und dem Programmcode gefüllt werden. Mit einer über WLAN realisierten Fernsteuerfunktion sollte der Roboter kabellos, wahlweiße entweder über Tastatureingabe eines Laptops, oder über eine Android-App, angesteuert werden können.
 |
Gestenerkennung
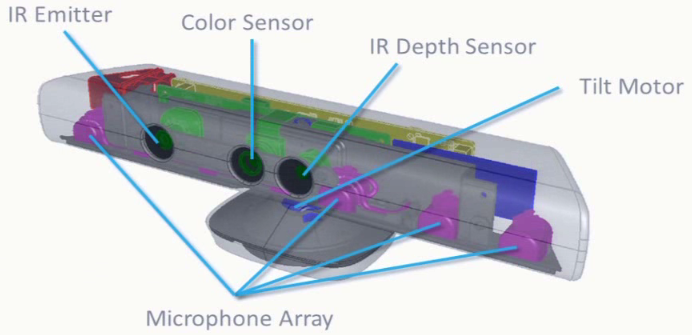
Mit der Mikrosoft Kinect Kamera ist es möglich verschiedene Bilder aufzunehmen und mit einem anderen System zu verarbeiten. Die Verarbeitung kann mit verschiedenen Programmiersprachen ausgeführt werden. Der erste Punkt der Aufgabenstellung ist es die Verbindung zwischen dem Kinect System und einem Computer sicherzustellen. Im Zusammenhang dazu wird eine passende Programmiersprache ausgewählt. Das Programm sollte aus einer automatischen Skelett-Erkennung bestehen. Aus dem daraus entstehenden Skelett-Stream wird eine Positionserkennung der Arme entnommen. Über eine kabellose Verbindung wird dann der Roboter mit diesen Skelett-Daten gesteuert.
 | 
|
Android APP
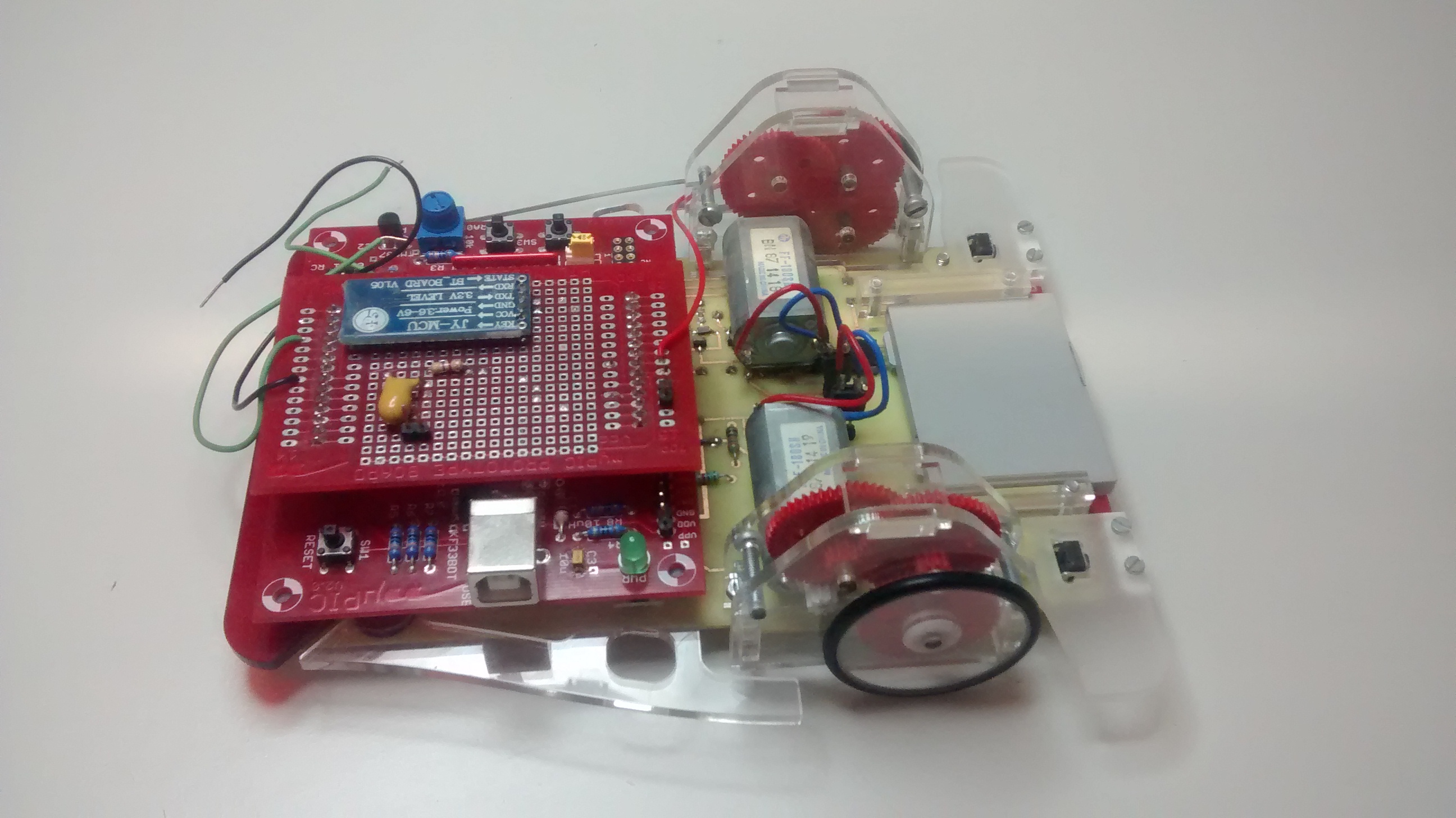
Die Android Applikation sollte den Roboter über Bluetooth steuern. Dies funktioniert über die Beschleunigungssensoren im Smartphone. Diese Beschleunigungssensoren werden dann mithilfe der Android Applikation ausgelesen und verarbeitet. Um die Verbindung zu simulieren wird der in der Schule gefertigte myBot (siehe Bild), welcher mit einem Bluetooth aufgerüstet wurde, angesteuert.
 |