Details
Android-App
Die GPS-Daten, welche wir vom Sensor am Quadrocopter erhalten, sollen strukturiert und übersichtlich in einer Android-App dargestellt werden (mit Hilfe von Google Maps).
Auch die Höhe des Quadrocopters, welche durch einen Barometrischen Sensor (DPS310) bestimmt wird, soll in der App angezeigt und gespeichert werden.
Die Übertragung der Daten vom Quadrocopter zum Smartphone soll drahtlos erfolgen (WLAN oder Bluetooth).
Eine bereits vorhandene Smartphone Applikation soll so optimiert werden, dass der Quadrocopter damit sicher in der Luft gesteuert werden kann. Hierfür soll ein digitaler Filter in den Sourcecode der Applikation eingebaut werden, der die Störungen, welche beispielsweise durch das Zittern beim Steuern verursacht werden, herausfiltert.
Optional können noch weitere Funktionen mit den GPS-Daten für weitere plakative Anwendungen realisiert werden.

Drucksensor
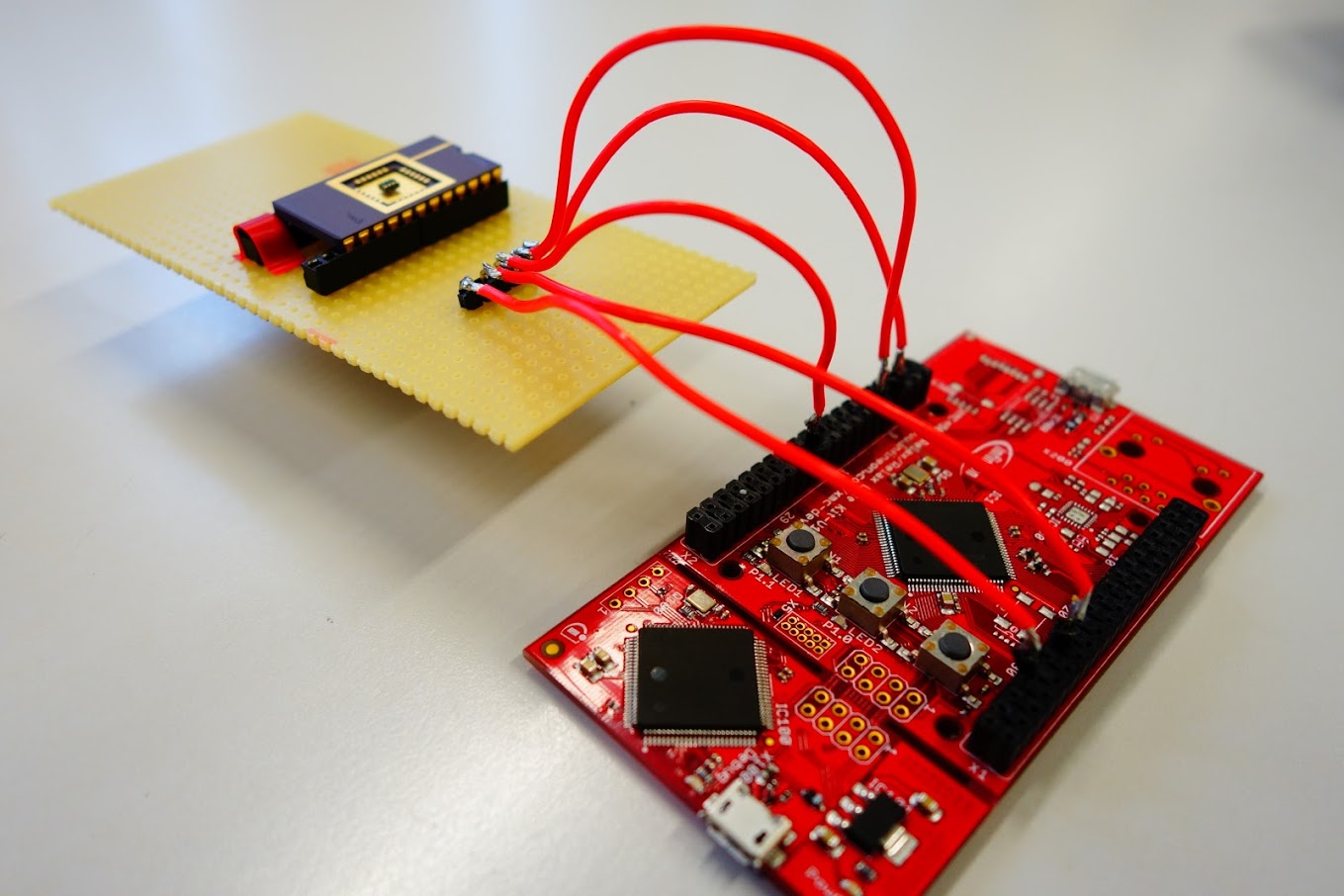
Mit Hilfe eines Barometrischen Sensors (DPS310) soll über den Luftdruck die Höhe erkannt und geregelt werden können. Für diese Aufgaben wird von der Firma Infineon ein XMC Controller zur Verfügung gestellt.
Der Quadrocopter und die Flightcontroller Software sind ebenfalls bereits vorhanden. Im ersten Schritt ist die bestehende Software zu verstehen, sodass Änderungen und Erweiterungen daran vorgenommen werden können. Es folgt eine theoretische Auseinandersetzung mit verschiedenen Sensortypen, mit der zu beantwortenden Frage warum der XMC Controller von Infineon die bestmögliche Lösung ist. Die Sensorwerte sollen über die seriellen Schnittstellen zum XMC übertragen werden. Am XMC werden die Daten dann verarbeitet. Zuerst sind die Unregelmäßigkeiten herauszufiltern, die von den Verwirbelungen der vier Rotoren verursacht werden. Danach ist der Luftdruck auf die entsprechende Höhe umzurechnen.
Optional ist noch eine Ergänzung der Sensordaten mit Hilfe der GPS-Daten möglich.
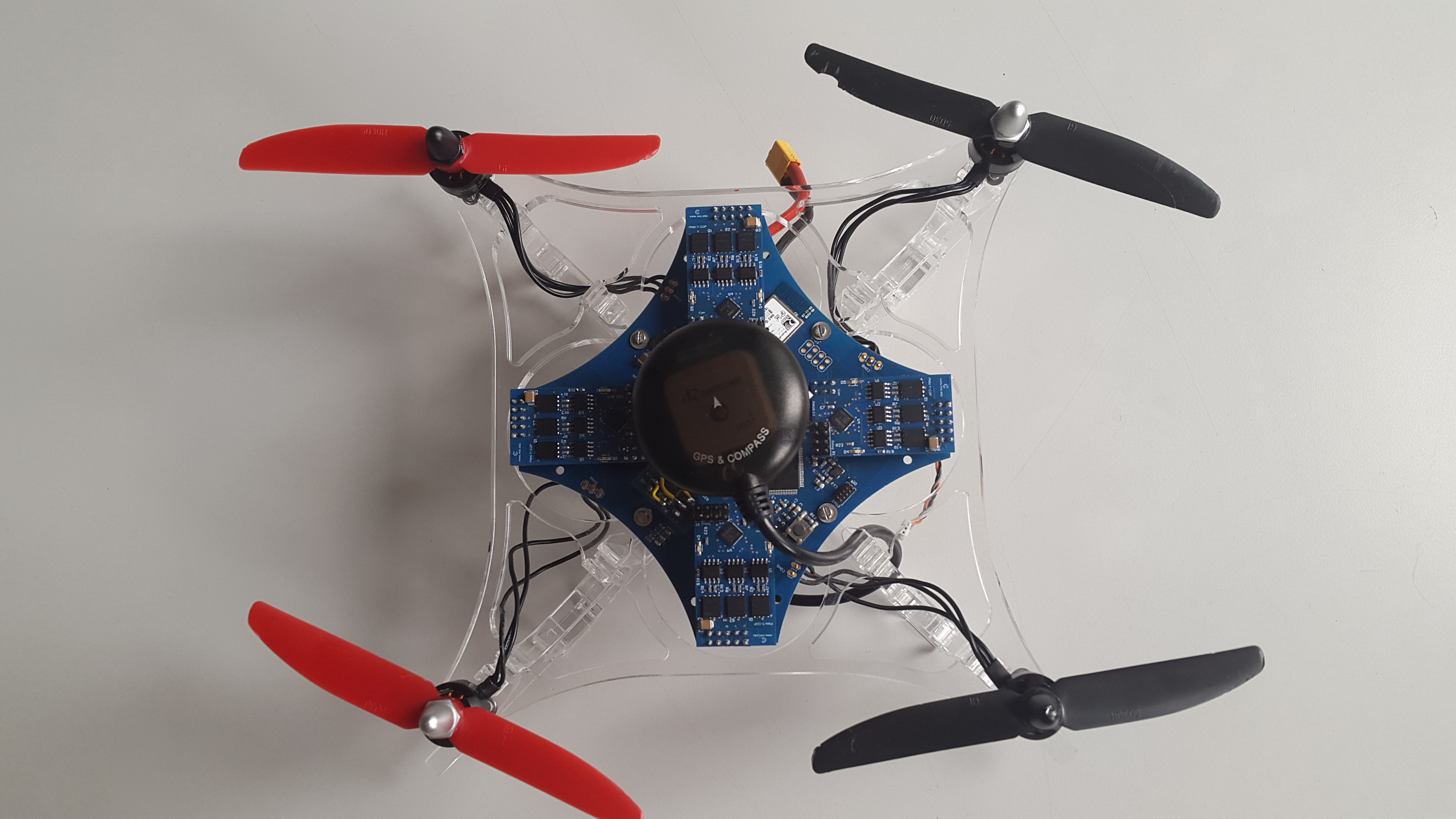
GPS-Sensor
Es soll der Infineon XMC mit integriertem GPS Modul so programmiert und konfiguriert werden, dass die GPS-Daten erfasst und in eine auswertbare Größe für die Handy-Applikation umgewandelt werden können.
Die gesamte Implementierung soll mit der Dave Entwicklungsumgebung von Infineon realisiert werden. Auf den bereits am Quadrocopter integrierten XMC soll ein GPS Modul angebracht werden.
Weiters muss ein passendes GPS Modul für unsere Anwendung gefunden werden, welches die Mindestanforderungen für die Höhengenauigkeit erfüllt. Im theoretischen Teil soll auf das Thema GPS und Alternativen eingegangen werden.
Weiters soll auch die Verbindung zwischen dem XMC und dem Bluetooth-Modul realisiert werden.