
Details
Grundlagen
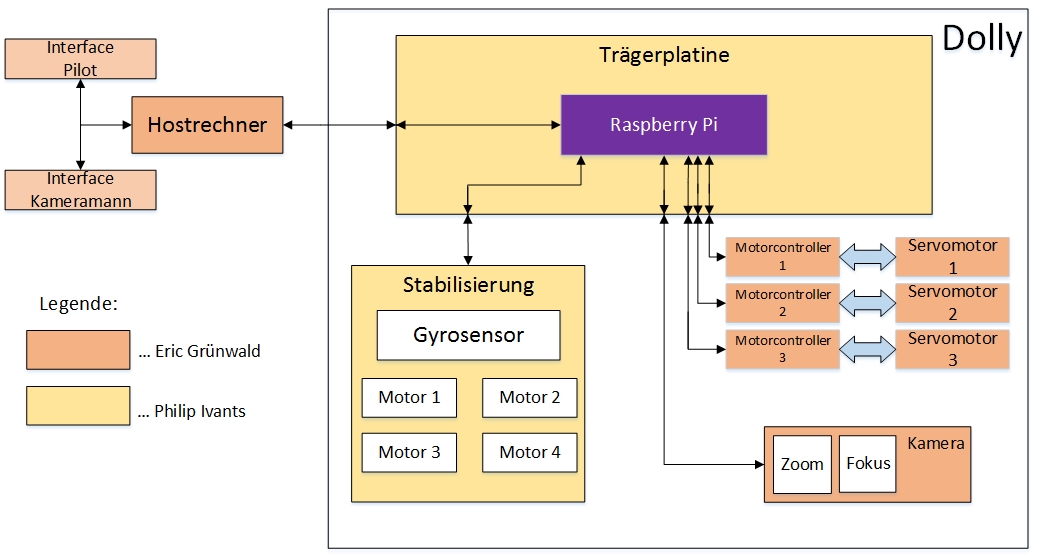
Die derzeitige Steuereinheit wird durch einen Raspberry Pi Model B+ ersetzt und soll die folgenden Grundfunktionen erfüllen: Kommunikation zum Hostrechner, Steuerung von drei Motoren inklusive Controllern, Ansteuerung der Optik und Stabilisierung des Dolly. Des Weiteren soll eine Trägerplatine entwickelt werden, um die diversen Signale zu den einzelnen Peripheriegeräten zu verteilen.
 |
Technische Details
Kommunikation zum Hostrechner
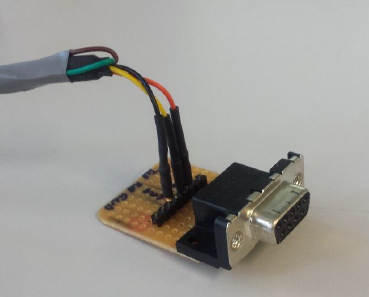
Es soll eine serielle Verbindung zum Host Rechner hergestellt werden. Der spätere Hostrechner wird zur Simulation durch einen Windows-Computer ersetzt. Dieser wird über zwei Kabel und einer Lochrasterplatine mit dem Raspberry Pi verbunden.
 |
Anschließend müssen vier Byts vom Hostrechner(PC) versendet werden.
 |
Die ersten zwei Byte geben das anzusprechende Device und den benötigten Befehl an. Die letzten zwei Byte enthalten nur Daten.
Versendet der Hostrechner nun diese vier Byte, werden diese vom Raspberry Pi auf Fehler überprüft. Treten keine Fehler auf, so wird der Index des Device und des Befehls, sowie der Wert der Daten am Terminal des Raspberry Pi ausgegeben.
 |  |
Ansteuerung von Motoren
Im der späteren Entwicklung des Projekts, sollen mehrere Motoren dabei helfen, den Dolly zu stabilisieren. Hierfür wird ein PIC 16LF1828 Mikrocontroller verwendet. Dieser gibt 4 Pulsweitenmodulationen (PWMs) aus. Die Breite regelt dann die Drehzahl der Motoren.
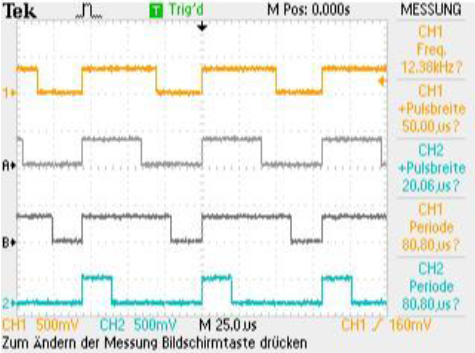 |
Über den Raspberry Pi wird ein Serial Peripheral Interface(SPI)-Signal gesendet, welches diese Breite verändert. Somit kann man steuern, wie schnell sich die Motoren bewegen. Des Weiteren wird die Laufrichtung der Motoren über den Raspberry Pi verändert.
Erstellen einer Trägerplatine
Für diese Platine sind folgende Spezifikationen erfüllen: Größe 160 mm x 100 mm, doppelseitig, durchkontaktiert. Sockelleisten damit der Raspberry Pi direkt aufgesteckt werden kann. Steckverbindungen zu allen Peripheriegeräten. Wichtig: Es sind keine Y-Kabel erlaubt. Die Steckverbindungen müssen so platziert werden, dass sich möglichst kurze Wege und keine Kreuzungen ergeben. Montagelöcher müssen an die Gegebenheiten des Trägers angepasst werden. Leiterbahnen müssen mit Breite und Kupferstärke an die zu erwartenden Ströme angepasst werden. Die Platine dient auch zum Verteilen anderer Signale, die nicht vom Raspberry Pi verarbeitet werden.
Hier ist der aktuelle Stand der Platine zu sehen:
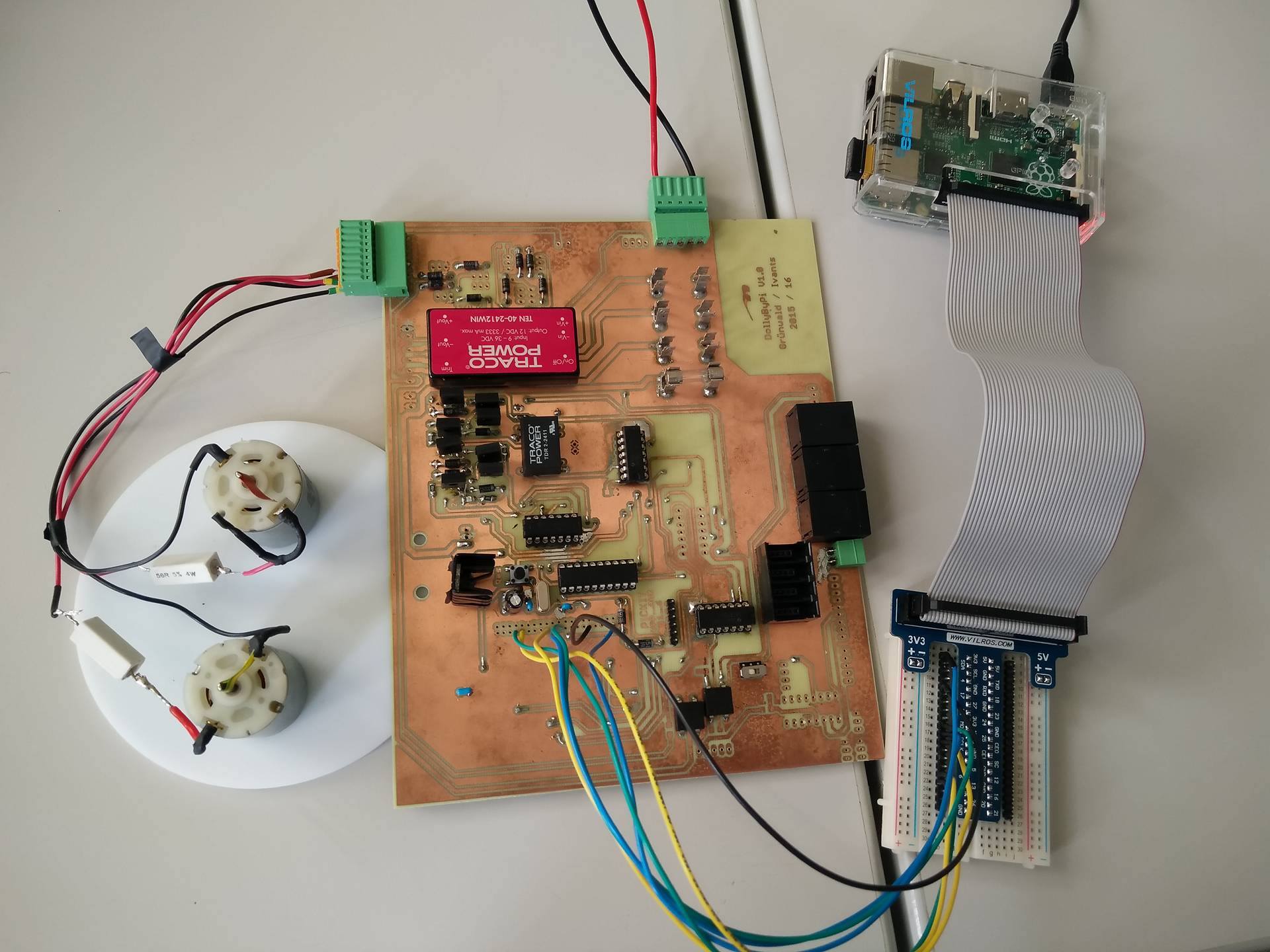 |